

1. 서 론
1.1 연구 배경
1.2 연구 동향 및 필요성
1.3 연구 목적
2. UAS 영상 및 LiDAR 조합 3차원 수치모형 구축
2.1 비탈면 개요
2.2 지상기준점(GCP) 및 수직면 기준점(VCP) 측정
2.3 UAS 영상기반 3차원 수치모형
2.4 UAS 영상 및 LiDAR 조합 3차원 수치모형
2.5 정확도 및 재현도 검증
3. 3차원 수치모형의 앵커 손상인자 분석
3.1 손상인자 검출
3.2 균열 분석
3.3 파손 분석
3.4 지반 밀착도 및 회전변위 분석
3.5 고찰
4. 결 론
1. 서 론
1.1 연구 배경
전 세계적으로 기후변화로 인한 기상재해 빈발 및 그 피해규모가 증가하고 있으며 우리나라 또한 연간 기온 및 강수량이 상승 추세를 보이고 있다. 2019년 기준 우리나라의 기온은 1973년 대비 1°C의 평균기온이 상승하였고, 강수량은 연간 1.8mm씩 증가하는 추세를 보이고 있다(Ministry of the Interior and Safety, 2020). 기후변화와 결부되어 SOC 시설물의 노후화 및 성능저하가 빠르게 진행되고 있으며, 특히 2020년은 장마(5mm 이상 3일 지속)기간이 지난 40년간 가장 긴 53일 발생하였다(Moon et al., 2020). 또한, 태풍의 영향으로 도로비탈면 붕괴가 전년도 대비 2 배 이상인 326 건이 발생하였으며, 기후변화로 인한 집중호우 및 태풍 등의 외적환경 변화 증가와 함께 지속적인 산지개발, 비탈면 노후화에 따른 붕괴의 규모는 증가하는 경향을 보이고 있다(Kwon, 2021). 따라서, 이러한 기후변화에 대응하기 위한 시설물의 안전관리 문제가 중요한 이슈로 대두되고 있고 이에 대한 해결책으로 스마트 기술 또는 4차 산업혁명 기술의 도입을 시도하고 있다.
현재 시설물의 외관조사는 점검자의 육안조사로 이루어지며 숙련도에 따라 점검 데이터의 신뢰도에 문제가 제기되고 있다. 「시설물의 안전관리에 관한 특별법」에 의거하여 2종 이상의 시설물은 상태평가 결과에 따라 보통 2년마다 정밀점검이 시행되는데 시간이력에 따른 외관 치수, 보수, 보강 이후 수치 데이터 등이 텍스트로만 존재하여 정보의 보관 및 다음 점검자에게 객관성 있는 정보전달이 부족한 실정이다. 그러므로 4차 산업혁명 기술을 활용하여 기존의 인력에 의존한 육안조사기반 정형 데이터 수집과 이를 이용한 유지관리에서 탈피하여 드론, 센서, 사물인터넷과 빅데이터 등의 기술이 접목된 비정형 데이터의 디지털화로 성능평가 기반의 시설물 유지관리가 요구되고 있다.
2018년 개정된 「시설물안전법」에 따라 시설물의 사용성, 안전성과 내구성 등을 고려하여 성능을 평가하고 이를 기준으로 시설물 유지관리의 목표를 설정하고 있다. 비탈면의 보호공법에 대한 내구성능 평가는 식생(피복률(%)), 콘크리트 뿜어붙이기(손상면적율(%)) 그리고 보강공법인 앵커의 경우 두부와 지반 밀착도, 앵커 두부의 균열 및 파손 등에 대한 정성적 평가가 이루어지고 있다. 그러나 앵커의 경우 설치된 모든 앵커를 조사하는 것이 아닌 선별적으로 10% 정도만 점검을 하도록 되어있고, 외관조사를 위한 점검자의 접근이 어려운 구간에 대해서는 조사가 미진할 가능성이 매우 높다. 또한 앵커 두부의 경우 콘크리트 수압구조물의 균열, 파손 등의 정량적 수치 데이터와 발생 구간의 이력관리는 현재 텍스트 중심의 점검 데이터로는 활용이 어려운 실정이다.
1.2 연구 동향 및 필요성
최근 관심이 높아지는 시설물의 스마트 유지관리(Smart Management)의 일환으로 공간정보가 주목받고 있다. 디지털 트윈(Digital Twin)은 컴퓨터에 현실 속 사물의 복사체를 만들고 다양한 물리적 속성 정보와 융합하여 과거와 현재의 운용 상태를 분석하고 미래의 대응방안을 예측하는 기술이다. 특히, 무인항공시스템(Unmanned Aerial System, UAS), LiDAR(Light Detection and Ranging)와 GNSS(Global Navigation Satellite System) 등을 이용한 3차원 수치모형 재현기술은 디지털 트윈의 핵심기술이며 최근 건설 산업 전반에 걸쳐 활발히 수행되고 있다(Lee and Kang, 2019).
UAS는 운영 이동성과 빠른 데이터 획득성 때문에 측량 및 매핑, 지형지질도와 시설물 모니터링과 같이 많은 건설인프라 시설물에 높은 적용 가능성을 보이고 있다(Liu et al., 2014). UAS는 컴퓨터 비전을 활용하여 토목 구조물의 시각적 검사와 손상 탐지를 위해 빠르게 이미지 데이터를 수집·분석하는데 용이한 장점이 있다(Morgenthal et al., 2016). Xiao et al.(2018)은 UAS를 활용하여 굴착중인 비탈면에서 취득한 영상 이미지로 3차원 수치모형을 구현하고 안정성을 정량적으로 평가함으로써 가능성을 검토하였다. Cho et al.(2020)은 UAS을 활용한 도로비탈면의 사진측량에 의한 3D 모델링의 정확도 비교분석을 위해 도로비탈면 상시계측 실측치와 비교하였다. 현장 변위의 실측치와 3D 모델링의 위치 간 차이를 역해석한 결과로 x, y 축의 수평 변위는 평균제곱근오차 3mm 이내이지만, z축의 수직변위 오차는 15mm로 수평변위와 비교했을 때 상대적으로 크게 나타났다. 통상적으로 수용 또는 통용되는 사진측량의 수평변위 오차는 20∼30mm, 수직변위 오차는 40∼60mm 범위로 볼 경우 3D 모델링의 수치 정확도가 매우 높은 것으로 평가하였다. Kang and Kim(2020)은 드론 촬영으로 비탈면 3차원 모델의 품질을 분석하였다. 지상기준점(Ground Control Point, GCP)을 적용하여 분석하였으며, 수직변위 z 축의 오차가 중요한 의미를 갖는 수직 시설물인 비탈면의 경우 모델 활용도 측면에서 떨어지는 것으로 평가하였다. 이와 같이 환경적 요인에 의한 촬영 및 스캔 거리 제한과 비탈면과 같은 수직 시설물의 요철로 인한 사각지대에 대한 데이터의 공백 보완이 필요하다.
UAS가 3차원 수치모형 생성을 위한 데이터 수집용으로 활용되기 이전에 항공 및 지상 LiDAR는 3차원 구조물 수치모형 생성에 사용되어 왔다(Tang et al., 2010; Xiao et al., 2015). 지상 LiDAR는 현재 최대 정밀도의 제품에서 측정오차 2mm, 각오차 0.5″의 정확도로 측정이 가능하여 매우 정밀한 수평·수직좌표와 이를 활용한 3D 정밀분석이 가능하다. 또한, 정지한 위치의 좌표를 기준으로 초당 수만에서 백만 포인트까지 좌표 데이터를 획득하며, 식생의 틈으로 투과한 신호로 지면 및 식생의 분류 데이터를 획득할 수 있어 영상해석에 의한 3D 모델의 공백 보완에 효과적이다. Jo(2011)은 지상 LiDAR를 이용하여 건물모형을 생성하여 정확도를 평가하였고, Lee et al.(2017)은 UAS 영상과 레이저 스캐너의 정확도 비교를 통해 공간정보 구축의 효용성을 입증한 바 있다. Jang et al.(2006)과 Park(2010)는 지상 LiDAR를 이용하여 암반비탈면의 불연속면을 측정하여 외적 안정성 평가의 가능성을 확인하였고, Park(2010)과 Lee et al.(2019)은 비탈면의 변위를 측정하여 유지관리의 가능성을 제시하였다. 하지만 모니터링을 위한 최적 조건으로 노이즈를 유발하는 식생 또는 데이터 미취득에 의한 공백 등 사각지대에 대한 한계를 나타내었다.
다양한 환경적 요인과 수직구조물인 댐, 옹벽, 공사 굴착면과 비탈면 등의 3차원 수치모형 재현은 수직 요철 구조로 인해 지상 LiDAR와 UAS 영상에서 모두 사각지대가 발생하였다. 그러므로 보다 정밀한 3차원 수치모형 구축을 위해서는 촬영 각도와 위치에 따른 사각지대의 데이터 공백을 보완할 필요가 있다. Kim(2008)은 항공 및 지상 LiDAR을 이용하여 구축한 비탈면의 수치표고모형(Digital Elevation Model, DEM)을 융합한 결과 평균편차가 향상된 것을 확인하였다. Kwon et al.(2017)은 UAS LiDAR와 지상 LiDAR의 포인트 클라우드를 결합하여 토공 현장의 적용성을 검토하였다. Mader et al.(2015)는 공중 LiDAR와 UAS 영상 이미지로 수치모형의 정확도를 비교하였으며, 공중 LiDAR의 오차가 더 높게 나타는 것을 확인하였다. 지형의 고도 시설물의 형상 등을 파악하기 위해서는 LiDAR만 활용해도 가능하나, 앵커의 미세균열이나 파손 등은 영상 이미지로 분석하는 것이 보다 높은 정확도를 나타낸다. 그러므로 영상 이미지와 LiDAR를 조합한 3차원 수치모형이 요구된다.
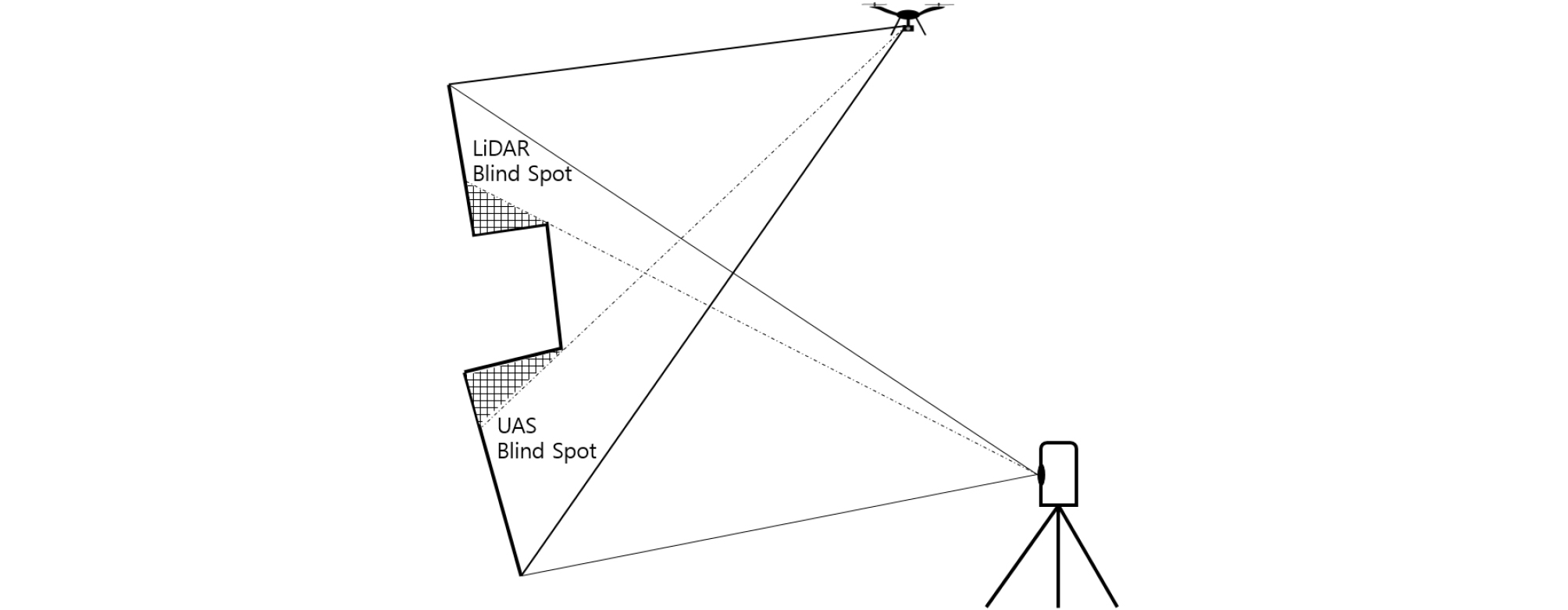
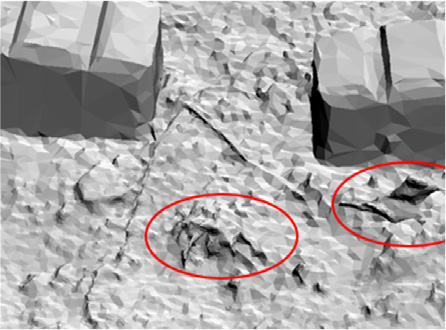
Xie et al.(2012)은 4개의 카메라가 설치된 UAS를 활용하여 건물의 3차원 수치모형 생성을 테스트한 결과 높은 정확도를 나타내었으며, Wefelscheid et al.(2011)은 UAS로 취득한 이미지로 3차원 수치모형 생성시 LiDAR와 동등한 수준의 정밀도를 갖는 것을 확인하였다. LiDAR와 UAS영상의 정확도와 정밀도가 유사한 수준에서 각각의 사각지대에 대한 데이터의 보완이 가능하다. Niculița et al.(2020)은 골짜기의 형상변화 모니터링을 UAS 영상 SfM(Structure from Motion)기반 DEM과 공중 LiDAR DEM을 조합하여 식생관련 오차 제거를 통해 활용성을 평가하였다. Saak et al.(2019)은 고산지형과 수직 암반면의 사각지대 해소와 고해상도 매핑을 위해 UAS 영상 이미지와 지상 LiDAR를 결합하여 3차원 점군 데이터(3D Point Cloud)와 DEM 생성하였고 실무적용 가능성을 확인하였다. Hayakawa and Obanawa(2020)은 해안 기반암의 침식 체적을 UAS 이미지와 지상 LiDAR을 결합한 점군 데이터로 파악하였고, 해당 결과를 통해 중첩의 효용성을 검증하였다. Kim et al.(2020)은 UAS 영상과 지상 LiDAR를 이용하여 급경사지 재해위험성의 평가방식을 제안하였다. Kang and Lee(2019)는 인공암벽을 대상으로 UAS 영상과 지상 LiDAR 조합에 의한 3차원 공간정보를 구축하였고, Fig. 1과 같이 UAS 영상해석과 지상 LiDAR의 각 사각지대의 상호보완으로 공백 데이터 보완이 가능하여 정밀 3D 재현이 가능하고 이를 유지관리에 적용시킬 수 있는 가능성을 시사하였다. 최근 연구동향으로 UAS 영상촬영 및 지상 LiDAR 레이저 스캔을 이용한 3차원 수치모형 재현과 이를 활용한 다양한 연구가 진행 중이다. 하지만 해당 방식을 이용하여 비탈면 유지관리에 적용한 연구는 미진한 상태로 이에 대한 연구가 필요하다.
1.3 연구 목적
본 연구는 비탈면에 설치된 앵커공법의 보강성능 평가시 정량적 평가지표 가능성을 파악하기 위하여 UAS 영상촬영과 SfM기반 영상해석 및 지상 LiDAR의 점군 데이터를 조합해석하여 인위로 조성한 앵커(10 공)가 시공된 비탈면에 대해 3차원 수치모형을 총 3회에 걸쳐 구현하였다. 1회와 2회 차는 시간이력에 따른 변화정도를 파악하기 위해 6개월 간격으로 촬영하였으며 4K 해상도로 촬영하였다. 마지막 3회 차에는 비탈면 앵커 두부의 밀착도, 변위 및 파손 등의 손상 인자를 8K 해상도로 촬영한 3차원 모델링을 통하여 손상인자를 도출하기 위하여 인위적으로 손상을 발생시켰다. 그리고 2회, 3회 차에는 지상 LiDAR를 설치하여 레이저 스캐닝을 수행하였다. 먼저, 구축한 3차원 수치모형에 대한 정확도와 재현도를 검증하였다. 그리고 비탈면 앵커의 손상인자인 균열에 대해서는 실측 균열 폭과 비교분석 하였으며, 파손, 지반과의 밀착도에 대해서는 3차원 수치모형에서 정량적 수치 데이터를 검출하였다. 균열은 앵커 두부의 균열 폭을 3차원 모형의 측정 결과와 실측치로 비교하였고, UAS 영상 해상도를 4K와 8K로 구분하여 3차원 수치모형의 균열 폭의 오차 차이를 분석하였다. 앵커 두부 파손의 경우 파괴면적과 체적을 검출하여 파괴율을 나타내었다. 또한, 두부가 회전 변위를 일으킨 경우 회전각과 변위를 측정하였다. 앵커 두부의 밀착도는 지반의 침하를 측정하였으며, UAS와 지상 LiDAR 조합해석 기반 수치모형에서의 최대 침하 깊이를 비교분석하였다. 마지막으로 3차원 수치모형에서 추출한 손상인자에 대해 유지관리 측면에서 활용 가능성을 검토하였다.
2. UAS 영상 및 LiDAR 조합 3차원 수치모형 구축
2.1 비탈면 개요
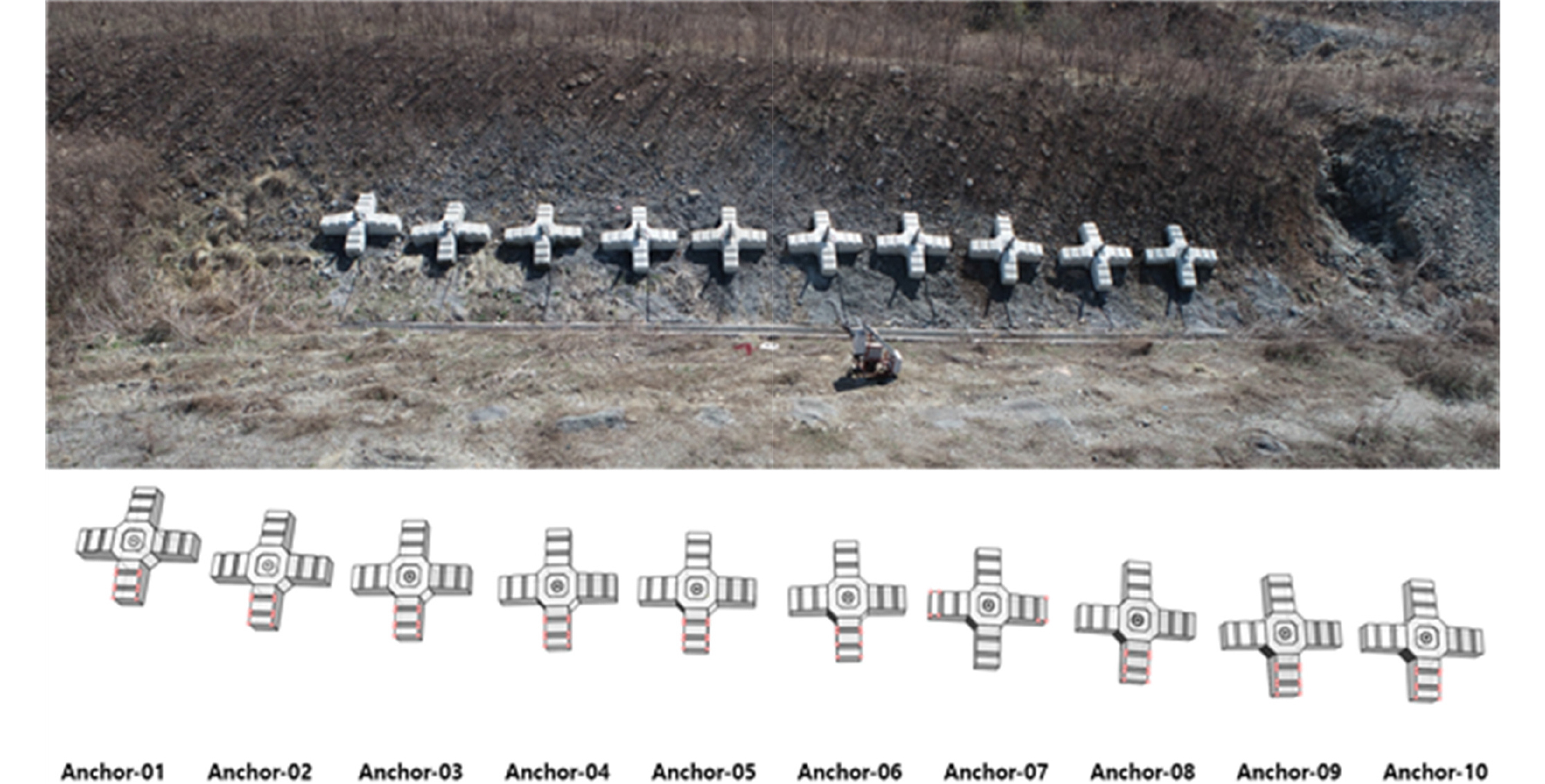
본 연구에 활용된 비탈면에는 보강공법인 앵커의 손상정도를 파악하기 위해 Fig. 2와 같이 앵커 10공을 시공하였다. 해당 비탈면 일대는 경기육괴에 해당되는 지역으로 경기변성암복합체를 비롯하여 소위 춘천누층군과 연천계라 불리는 변성퇴적암과 쥬라기의 심성암류가 주로 분포한다. 또한, 선캠브리아기의 편마암 및 편암류 외에 중생대 쥬라기의 김포탄전 혹은 경기탄전으로 불리는 대동층군이 소규모 분포한다. 비탈면 구성암은 선캠브리아기의 연천군층 편암류에 해당하며, 풍화도는 기반암에 풍화층이 두껍게 형성된 심한풍화(Highly Weathered)에서 풍화작용으로 제자리에 퇴적된 흙으로 변모하는 풍화잔류토(Residual Soil)의 양상을 보인다. 비탈면 제원은 지면 하단으로부터 앵커가 시공된 첫 번째 소단까지 높이 4.5m, 경사각 33.6°의 형상을 보이며, 전체 84m 구간 중 27m 구간에 2m 간격으로 앵커 10 공이 설치되었다.
2.2 지상기준점(GCP) 및 수직면 기준점(VCP) 측정
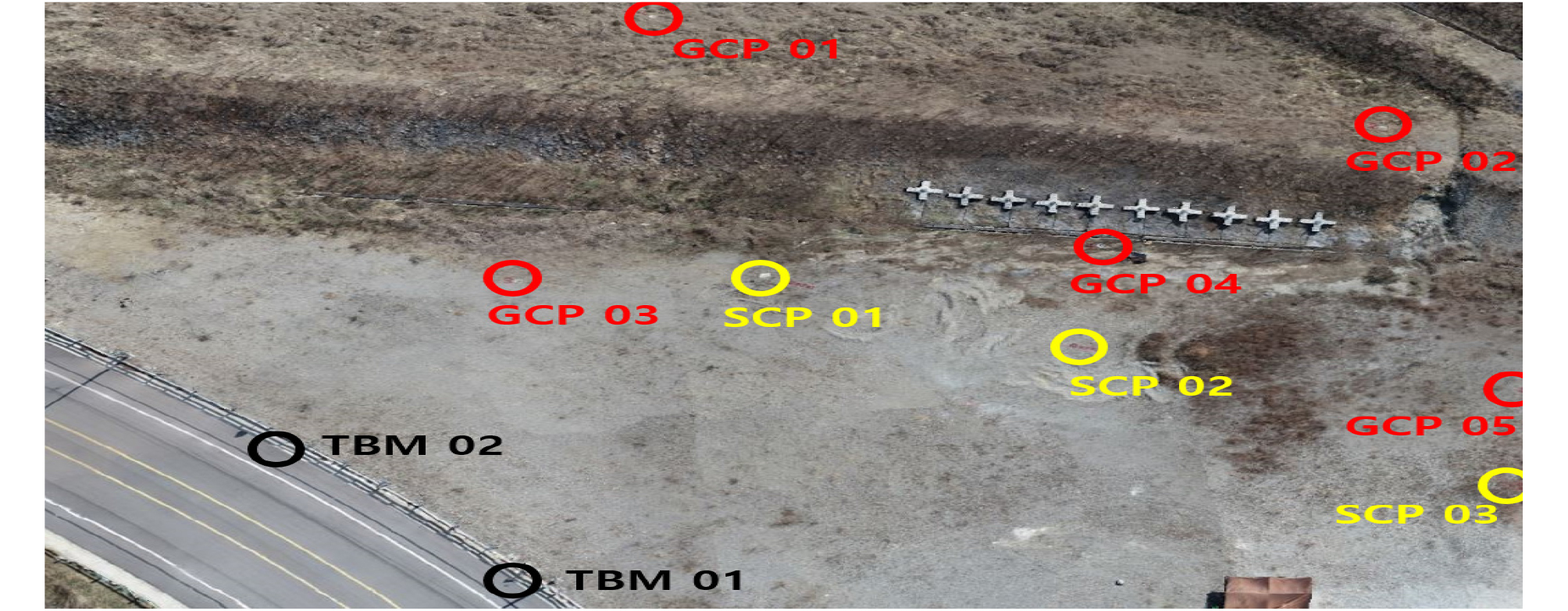
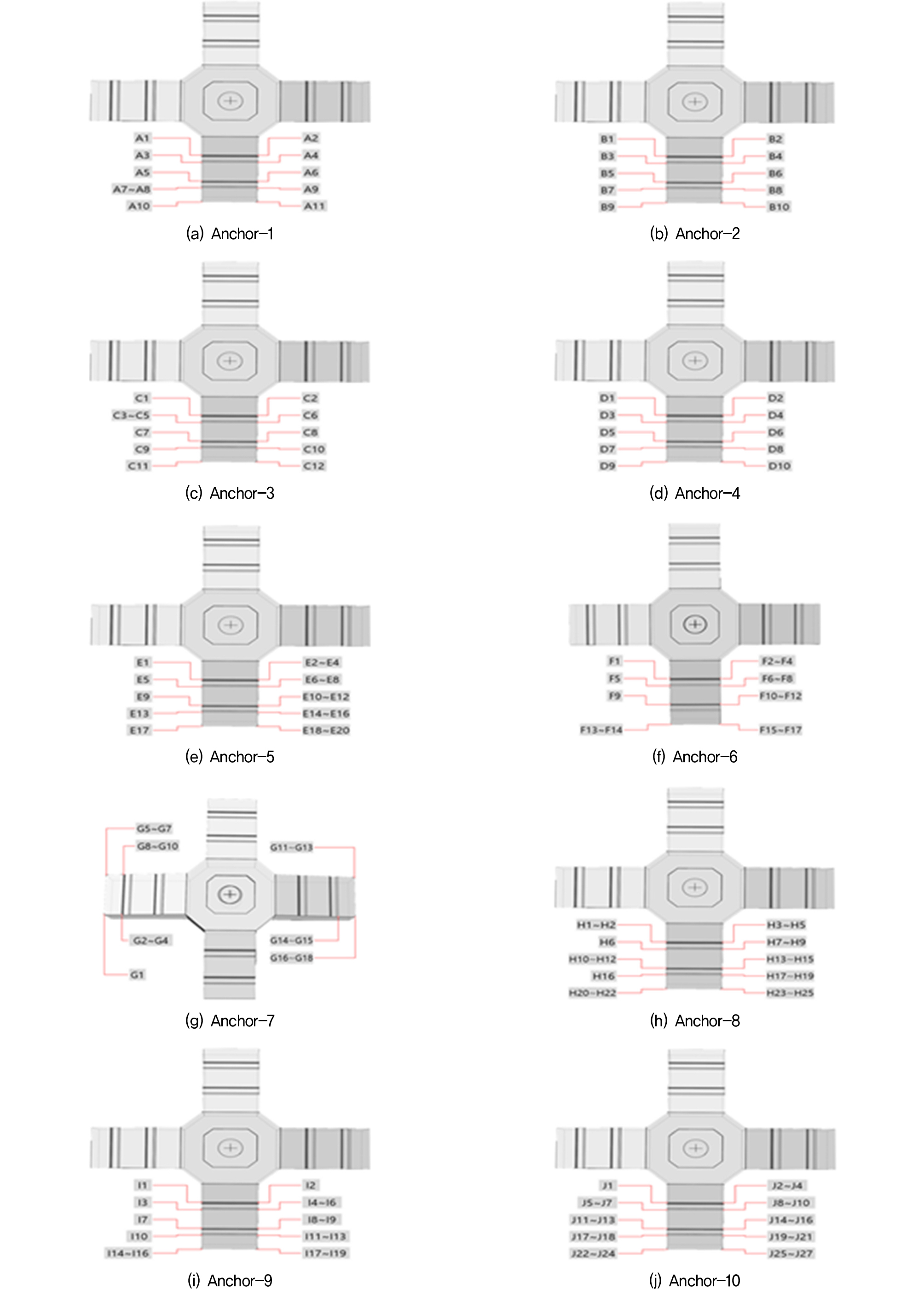
3차원 수치모형에 이동을 통한 구조 추출(SfM) 알고리즘을 적용하기 위해서는 디지털 이미지 정보에 대한 위치 속성정보와 지오태깅(Geo Tagging)이 필요하다. 실제 지면 정보와 같은 GCP를 디지털 이미지의 특징점과 연관 짓는 작업을 위해 Fig. 3과 같이 설치하였다. GNSS 측량 특성에 따라 수직 z 좌표의 오차범위가 상대적으로 큰 것을 고려하여 대상지에 인접한 도로부에 TBM(Temporary Bench Mark) 2개소를 설치하고 GNSS RTK 측량을 수행하였다. 비탈면 인근에 설치한 GCP에 일률적인 오차적용 및 정확도 향상을 위해 하나의 TBM을 기계점으로 하여 GCP 및 지상 LiDAR 설치를 위한 SCP(Scan Control Point) 3개소에 대해 Total Station 측량을 수행하였다. 또한, UAS 영상해석 기반 수직구조물의 정밀 3차원 수치모형 재현을 위해서는 GCP와 달리 수직면 기준점(VCP, Vertical Control Point)이 필요하다. 이에 본 연구에서는 Fig. 4와 같이 각 앵커의 수직단면에 10∼27개, 총 169개의 VCP를 측정하였고, 이를 이용하여 UAS와 지상 LiDAR 기반 조합해석으로 3차원 수치모형을 구현하였다.
2.3 UAS 영상기반 3차원 수치모형
2회 차의 3차원 수치모형은 시간이력에 따른 변화를 파악하기 위하여 1회 차와 6개월의 차이를 두고 진행하였으며, 사용 장비는 Table 1의 DJI PHANTOM 4 PRO이고 제원은 4K(5472×3648) 해상도, 1″ CMOS 이미지센서와 FOV 84° 및 초점거리 24mm 렌즈를 탑재하였다. 3회 차의 3차원 수치모형은 앵커 두부에 인위적인 변위를 발생시킨 후 진행하였으며, 사용장비는 AUTEL EVO 2 Dual 640T로 제원은 8K(8000×6000) 해상도, 1/2″ CMOS 이미지센서 및 FOV 79°에 무손실 4배 광학줌에 의한 초점거리 4.3mm에서 17.2mm까지 지원하는 렌즈를 탑재하였다. 최대 촬영고 60m에서 촬영각 90°의 이중격자로 전경 데이터를 획득하였다. 비탈면의 특성상 촬영각 90°의 자동비행으로 획득하는 데이터는 다수의 사각지대가 발생하는 문제가 있다. 따라서, UAS 데이터의 사각지대를 최소화하기 위해 비탈면 각에도 따라 카메라 촬영각을 조절하여 수집하였다. 본 연구에서는 촬영고는 5m에서 10m 및 촬영각 35°∼90°로 근접 데이터를 획득하였으며 평균 촬영고는 50m로 각 회차별 촬영조건을 동일하게 설정하여 촬영하였다. 3차원 수치모형 구현을 위한 UAS 영상 데이터는 촬영고 5m∼10m에서는 269매, 10m∼60m은 763매 취득하였다.
Table 1.
Photographing condition for creation of 3D Model by 3 cases





2.4 UAS 영상 및 LiDAR 조합 3차원 수치모형
UAS 영상 및 지상 LiDAR 조합 3차원 수치모형은 Fig. 5와 같이 UAS에 의한 영상 데이터 수집과 지상 LiDAR에 의한 3차원 점군 데이터 수집 후 정확한 데이터의 처리를 위해 3D 분석 대상 외 노이즈 및 식생과 이동 물체와 같은 데이터의 자동/수동 분류(Classification)로 제거할 대상을 처리하여 구현하였다. 영상 데이터의 경우, 영상 간 특징점 매칭과 각 영상의 카메라 자세 및 위치를 역산출하여 3차원 점군 데이터의 생성과 이를 포인트 간 삼각망(TIN, Triangulated Irregular Network)으로 연결한 면으로 구성된 3차원 모델을 추출하였다. 넓은 면적의 영상 데이터 취득이 가능한 경우 비교적 빠르게 3차원 데이터를 취득할 수 있지만 영상의 중첩율과 해상도 및 카메라의 내부·외부표정요소의 오차 등에 의해 정확도가 결정되는 단점이 있다. LiDAR 데이터의 경우 광원(Laser)에 의한 대상의 정확한 3차원 점군 데이터의 수집과 직접적인 처리가 가능하여 빠른 데이터 처리속도와 높은 정밀도가 장점이나, 데이터의 특성상 영상에 의한 면분석이 제한되는 단점이 있다. 이를 보완하는 방법으로 본 연구에서는 영상기반 3차원 데이터와 LiDAR의 3차원 점군 데이터를 병합하여 포인트 간 삼각망을 재구성하는 방식으로 조합해석을 수행하여 3차원 수치모형을 구현하였고 인위적 손상에 대한 전·후 비교를 진행하였다. 인위적 손상의 전·후 비교 기준으로 2회, 3회 차 지상 LiDAR 스캔 작업을 진행하였으며 유효범위 600m에 주사각 정밀도 1″ 및 거리측정 정확도 1mm +1.5ppm의 스캔 제원을 갖는 Trimble SX10을 활용하여 Table 2의 스캔 조건으로 획득하였다. 점군 데이터는 측정한 비탈면 전체영역은 약 1,800 만, 앵커 영역은 약 490 만 점군 데이터를 수집하였다.
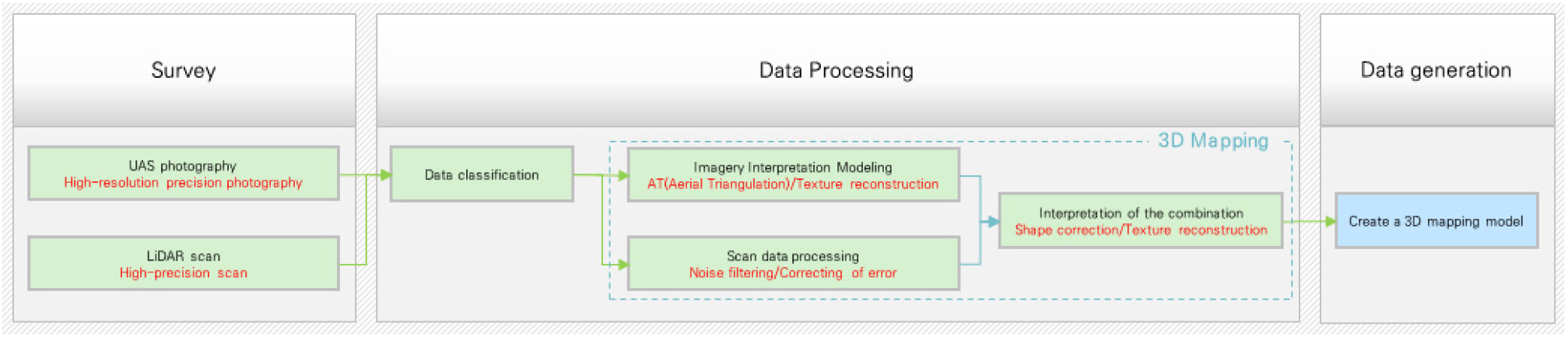
Table 2.
Terrestrial LiDAR scanning condition for creation combining 3D model by 2 cases



2.5 정확도 및 재현도 검증
UAS와 지상 LiDAR에 의한 각각의 3차원 수치모형과 이를 조합한 3차원 수치모형의 정확도 비교를 위해 3회 차 데이터 획득 시 한 점의 각과 거리를 측량하는 토탈스테이션을 기준으로 앵커 상부면에서 169개의 VCP 검사점을 측정하였다. VCP 169개의 좌표를 기준으로 각 3차원 수치모형에서 추출한 검사점 좌표와의 오차를 표준편차(STD)와 평균제곱근오차(RMSE)로 나타내었다. 토탈스테이션 데이터를 기준으로 각 데이터별 비교군에 따라 토탈스테이션 및 LiDAR 스캔 간 정확도 검증(Test-A), 토탈스테이션 및 UAS기반 3차원 수치모형 간 정확도 검증(Test-B), 토탈스테이션 및 조합해석 간 정확도 검증(Test-C)의 총 3가지 분류로 진행하여 Table 3의 결과를 도출하였다. LiDAR(Test-A)와 UAS(Test-B)에 의한 각각의 3차원 수치모형에서 수평 x, y축의 RMSE는 각 20mm, 19mm로 나타났으나, 조합 3차원 수치모형(Test-C)은 13mm로 정확도가 증가하는 것으로 나타났다. 특히, 수직 z 좌표의 RMSE는 UAS기반 3차원 수치모형(Test-A)에서 49mm로 크게 나타났지만, LiDAR 기반 수치모형(Test-B)에서는 9mm이고 이를 조합한 3차원 수치모형(Test-C)에서도 동일하게 9mm로 나타나 UAS 기반 수치모형보다 정확도가 향상된 것으로 볼 수 있다. 비탈면과 같이 수직 구조물에서 UAS 기반 3차원 수치모형의 수직 z 좌표의 큰 오차는 3차원 수치모형의 활용도 측면에서는 떨어지는 경향이 보이나 지상 LiDAR 스캔을 통해 요철부위에서의 비가시영역(Blind Spot)에 대해 UAS 영상과 지상 LiDAR의 조합은 데이터의 공백을 보완하여 Test-C와 같이 향상된 정확도를 나타내었다.
Table 3.
STD and RMSE of the analysis process according to the comparison test by data (Unit : mm)
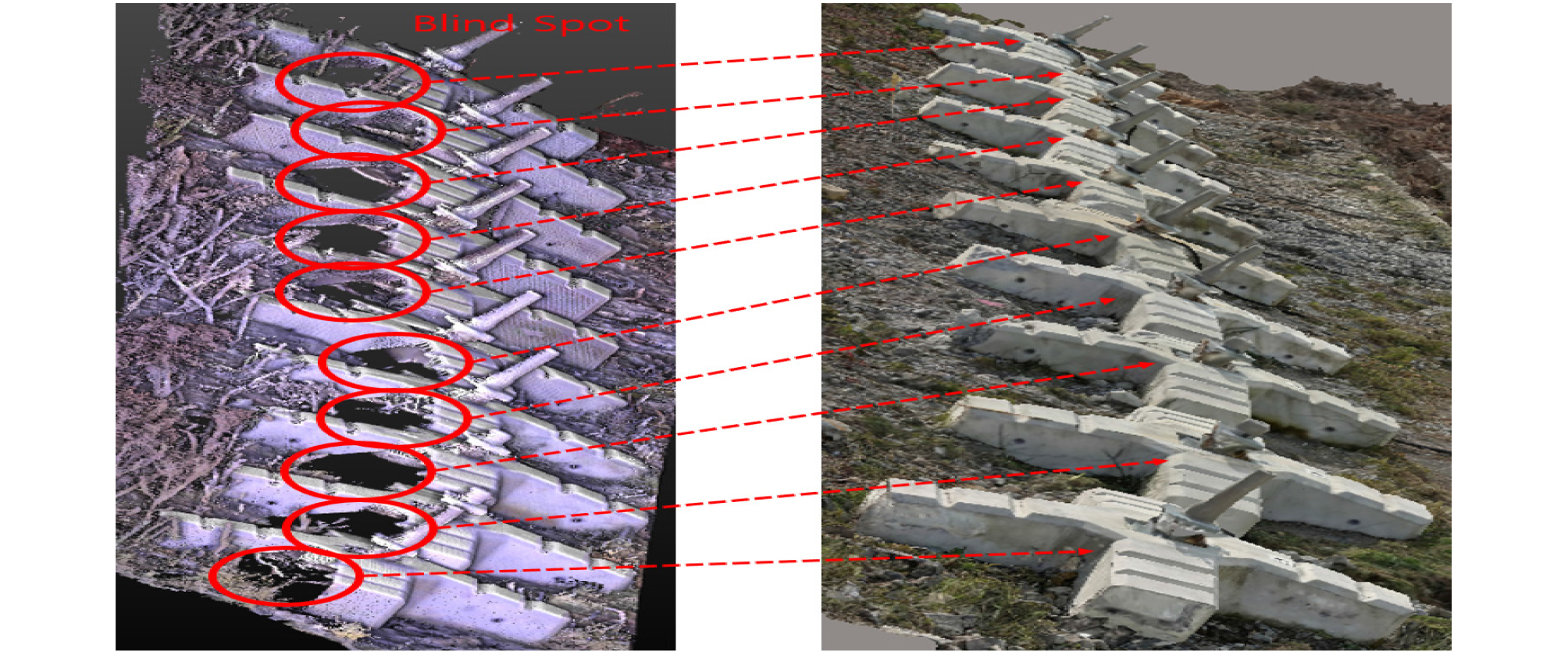
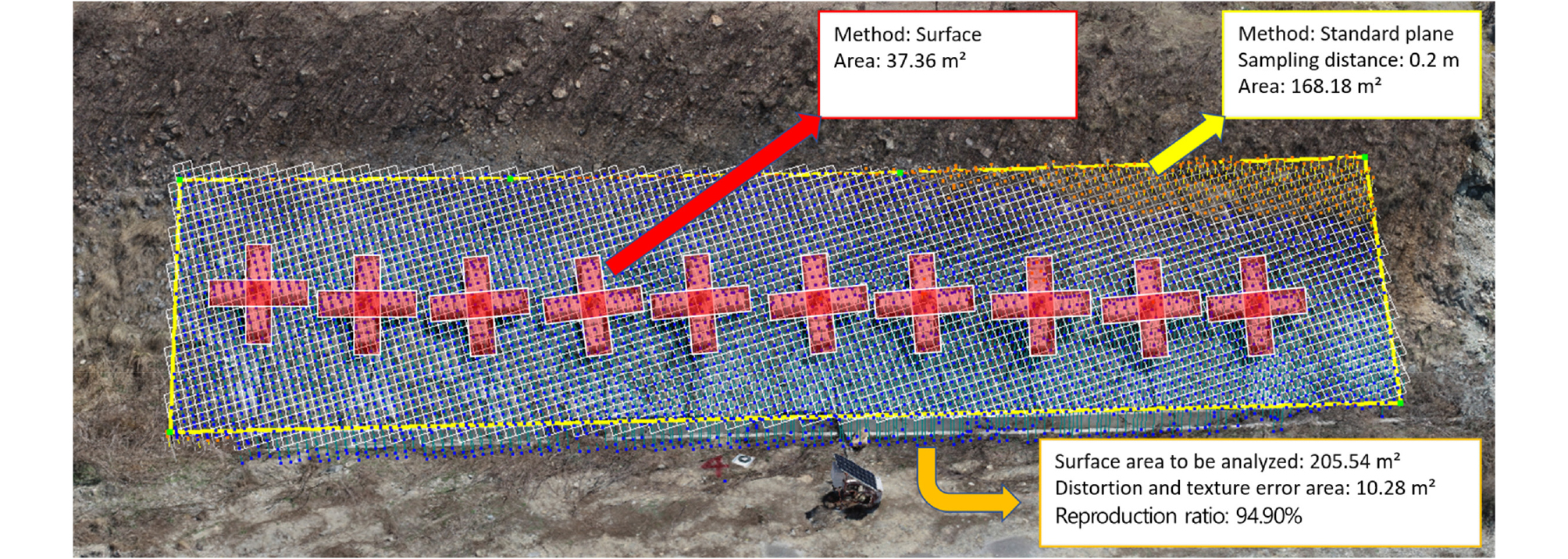
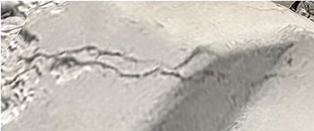
Fig. 6은 지상 LiDAR의 레이저 스캔시 앵커의 상부면에서 비가시영역이 발생되었으며, UAS 이미지로 해당 영역을 보완하여 나타낸 것이다. 각 데이터 수집방법별 비가시영역이 발생하는 단점을 보완한 재현도는 Fig. 7과 같이 확인하여 조합해석에 의한 3D 정밀분석의 효용성을 확인하였다. 재현도 분석 시 분석영역을 설정하여 재현된 3차원 수치모형의 표면적에서 모델구현상 면처리가 불가한 식생, 와이어, 전선 등이 포함된 영역을 분석 대상면적에서 제외하였고, Table 4와 같이 전체 영역에서 형상의 왜곡이 발생 또는 텍스처 표현에서 평균 해상도 이하 수준으로 표현된 영역의 면적비로 산출하여 재현도를 검증하였다. 분석대상 표면적은 앵커 10공의 전체 면적과 지반 표면적을 합친 것으로 총 205.54m2이고, 왜곡 및 텍스처 에러면적은 10.28m2으로 재현도는 94.9%로 나타났다.


3. 3차원 수치모형의 앵커 손상인자 분석
3.1 손상인자 검출
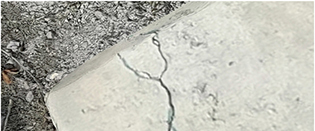
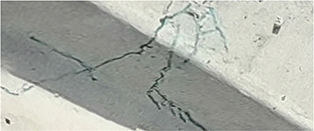
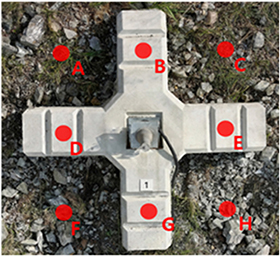
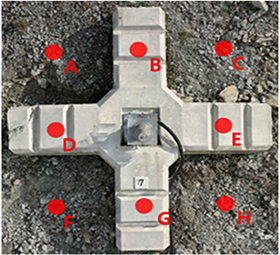
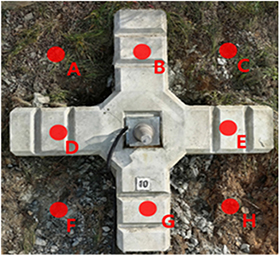
3회 차의 3차원 수치모형은 비탈면에 설치된 앵커의 손상인자인 균열, 파손, 회전변위 그리고 지반 밀착도(침하)에 대한 변동사항을 검출하기 위하여 인위적으로 손상을 발생시킨 후 구현하였다. 1회-2회 차의 3차원 수치모형은 6개월 기간 동안의 시간이력에 대한 변형을 비교하기 위함이며, 2-3회 차의 수치모형은 인위적인 손상이 발생된 이후의 변동사항을 비교한 것이다. Table 5는 인위적인 손상 발생 후 3차원 수치모형에서 검출한 손상인자를 표시한 것으로, 빨간색의 A는 균열, 노란색의 B는 파손, 파란색의 C는 변위 그리고 주황색의 D는 지반침하를 나타낸 것이다. 1번과 9번 앵커에서는 손상이 검출되지 않았으며, 2번 앵커는 두부 중심에 균열이 발생되었다. 3번 앵커에서는 전체적으로 균열, 파손, 변위가 발견되었으며, 4번과 8번 앵커는 국소적으로 균열과 파손 그리고 변위가 발생된 것을 확인하였다. 2번, 5번, 6번 그리고 7번 앵커의 경우 두부가 회전변형을 일으켰으며, 5번 앵커가 가장 큰 회전 이동을 나타내었다. 6번 앵커의 경우 끝단에서 파손이 발견되었고, 7번과 10번 앵커의 경우 지반 침하가 발생된 것을 3차원 수치모형에서 확인하였다. 도출한 손상인자인 균열, 파손과 회전변위 그리고 지반침하에 대한 정량적 수치를 추출하였다.
Table 5.
Marking damage factor of anchors head on 3D model
| No. | Marking damage factor | No. | Marking damage factor |
| 1 |  | 2 | 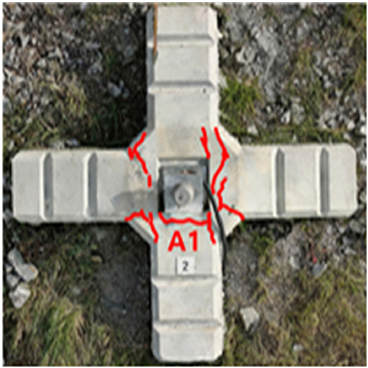 |
| 3 | 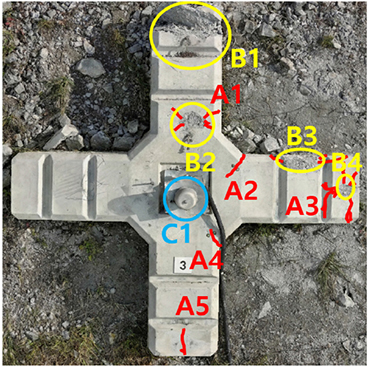 | 4 | 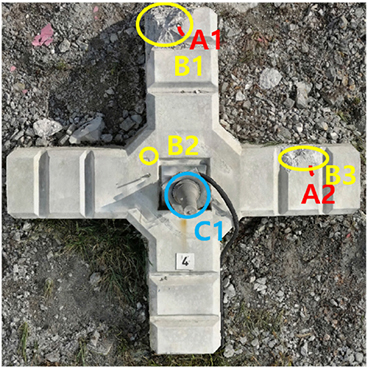 |
| 5 |  | 6 | 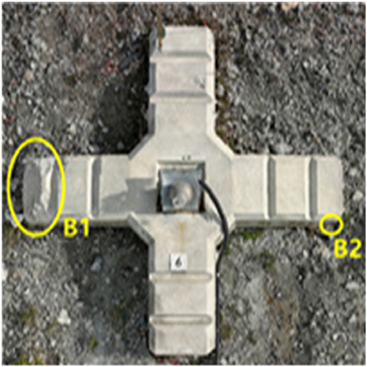 |
| 7 | 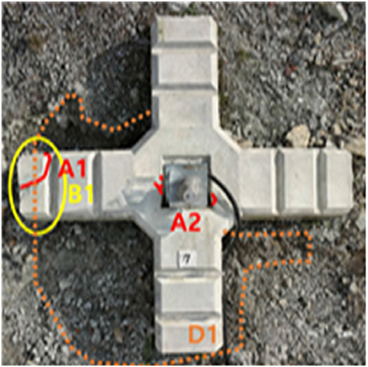 | 8 | 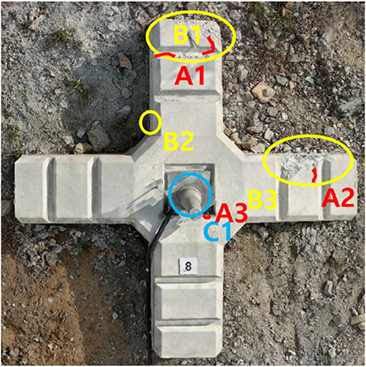 |
| 9 |  | 10 | 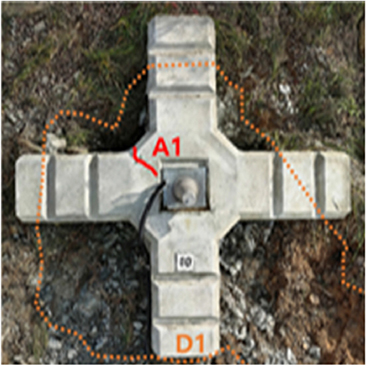 |
3.2 균열 분석
총 3회에 걸쳐 구현된 3차원 수치모형에서 각각 정사영상을 추출하여 투명도 70% 기준으로 오버레이를 통해 앵커의 손상을 도출하였다. 1-2회 차 3차원 수치모형 오버레이 비교시 6개월 동안 앵커간의 변위나 파손은 발생되지 않음을 확인하였다. 2-3회 차 3차원 수치모형 오버레이 비교시 앵커의 균열, 파손, 변위와 지반침하 등의 손상이 발생하였음을 확인하였다. 위의 Table 5의 균열 A는 정사영상을 기준으로 10공의 앵커에서 발생된 균열의 위치를 나타낸 것으로, 균열은 2번, 3번, 4번, 7번, 8번과 10번 앵커에서 발생하였다.
3회 차의 3차원 수치모형에 나타난 균열 폭의 측정값과 실측값을 비교하여 나타낸 것이 Table 6이며, 8개의 균열을 선별하여 균열 폭을 측정하였다. 3차원 수치모형 이미지에서 균열 측정은 acute 3D viewer 프로그램을 활용하였다. 실측값과 3차원 수치모형의 측정값과의 평균 오차 범위는 ±0.05mm를 보이고 있다. 다만, 특이점으로 균열 폭 실측값이 0.20mm 미만의 경우 검출되지 않은 것으로 볼 수 있는데, 특히 4-A2-1의 균열은 80%이상 중복도의 데이터로 실측값이 0.1mm인 균열이 나타났지만 3차원 수치모형에서는 0.21mm로 측정되었다. 영상 원본이미지에서도 0.2mm 미만의 미세 균열은 드물게 나타났지만 육안으로 확인 가능하였다.
Table 6.
Comparison crack width between 3D model and field measurement (unit : mm)

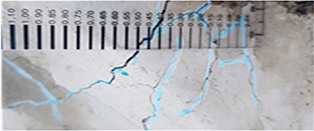






UAS 영상 촬영은 5m∼60m의 동일한 고도에서 2회 차 촬영시 4K 해상도(5472×3648)로 3차원 수치모형을, 3회 차 3차원 수치모형은 8K(8000×6000)의 해상도로 촬영하여 구축하였다. 8K 해상도의 이미지의 지상표본거리(Ground Sampling Distance, GSD)는 카메라 초점거리 14mm, 촬영고 5m일 때 0.567mm/pixel이고, 4K 해상도의 5m 촬영고, 카메라 초점거리 6.8mm에서 GSD는 1.37mm/pixel 이다. 3차원 수치모형을 구축한 해상도에 따른 균열 폭의 오차를 확인하기 위하여 2차와 3차에서 공통으로 나타난 균열 폭을 각 수치모형의 측정값과 실측값으로 Table 7과 같이 비교하여 확인하였다. 실측 균열 폭이 0.15mm인 경우, 4K 해상도에서는 0.32mm, 8K 해상도에서는 0.21mm로 나타났으며, 위에서 언급한 것과 같이 최소 픽셀 크기로 인한 차이에 따라 8K 해상도에서 측정 가능한 균열 폭은 0.21mm이며 4K 해상도의 최소 측정 가능한 균열 폭은 0.32mm로 볼 수 있다. 실측 균열 폭과의 오차는 4K해상도에서는 0.17mm와 8K 해상도에서는 0.06mm의 차이가 나타났다. 오차 범위를 비교하기 위해 4K 해상도의 최소 측정 가능 균열 폭을 고려하여 실측 균열 폭 0.3mm에 대하여 측정하였다. 8K 해상도의 균열 폭은 0.3mm로 동일하게 측정된 반면, 4K 해상도의 균열 폭은 0.49mm로 0.19mm의 오차를 나타내었다.
Table 7.
Comparison crack width between 4K and 8K resolution (unit : mm)
| No. anchor | 3D model (4K) | 3D model (8K) | Measurement |
| 3 |  |  |
Field : 0.15 4K : - 0.17 8K : - 0.06 |
| 0.32 | 0.21 | ||
| 7 |  |  |
Field : 0.30 4K : - 0.19 8K : 0.0 |
| 0.49 | 0.30 |
GSD는 이미지의 픽셀 중심사이의 거리를 나타내는 것으로 1mm/pixel의 GSD는 이미지에서 1픽셀이 실제 1mm의 거리를 측정할 수 있다는 의미이지만, 이미지에서 해당 손상의 구별가능/불가능을 의미하지는 않는다. Shigeta et al.(2019)와 Wang et al.(2022)는 1.5mm/pixel의 이미지 픽셀 크기에서 0.1mm 균열 폭 구분이 가능함을 실내시험을 통해 확인하였다. 균열의 경우 높은 정밀도를 요구하는데 앵커의 수압판은 콘크리트로 시공되어 있고 손상에 따른 유지관리 측면에서의 보수공법 적용시, 콘크리트 균열 폭 0.3mm는 보수공법의 적용이 달라진다. 폭 0.3mm 미만 균열은 표면처리 보수공법이 주로 적용되고 있고 폭 0.3mm 이상의 균열은 충전식(주입식) 보수공법이 적용되고 있다. 따라서 유지관리 측면에서 균열 폭 0.3mm 이상의 균열을 구조적 균열로 관리하고 있다. 본 연구에서는 8K 해상도의 경우 0.567mm/pixel의 이미지에서 acute 3D viewer 프로그램을 활용하여 0.3mm(오차±0.05) 미만의 균열 폭 측정이 가능함을 유지관리 측면에서 확인하였다.
3.3 파손 분석
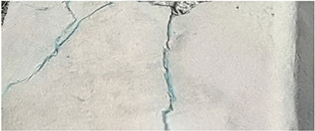
앵커 두부의 파손은 Table 5에서 표시한 것과 같이 3번, 4번, 6번, 7번 그리고 8번 앵커에서 발생되었고 앵커의 면적은 설계도면에서는 3.736m2 이다. 3차원 수치모형은 지층 위에 나타난 앵커 면적만 측정되어 Table 8과 같이 3.092∼3.50m2으로 설계도면 면적 대비 17.2∼6.3%의 오차가 발생하였다. 면적의 오차 발생 이유로는 Table 9와 같이 지반 구조물에서 나타나는 식생과 토사나 자갈 등의 방해로 인한 중복도 감소로 인해 왜곡이 발생한 것으로 볼 수 있다. 중복도가 높은 면적에 대해서는 앵커 3번과 같이 파손 부위가 선명하게 나타나지만, 데이터 중복도가 낮은 2번 앵커의 파손 부위는 고저차로인해 UAS 접근이 어렵고 해당 부분의 데이터량이 상대적으로 낮고 식생이 인접하게 분포되어 있어 3차원 수치모형 구현시 함께 모델링이 진행되어 데이터 품질이 낮게 나타났다. 2.5절에서 비탈면 전체의 재현율이 약 95% 수준이지만 앵커 두부와 같이 지반의 요철 구조물에서는 왜곡 발생과 식생, 토사의 영향으로 면처리가 불가능한 영역이 비교적 높게 나타난 것으로 확인되었다.
Table 8.
Detecting failure area of anchor head by 3D model
Table 9.
Causes of error in reproducibility of anchor area by 3D model
|
No. anchor | Photograph image | 3D model |
| 3 |  |  |
| 2 |  |  |
앵커 두부의 설계 면적 대비 파손율은 Table 8과 같이 4개 지점에 파손이 발견된 앵커 3의 파손율은 3.98%로 가장 크게 나타났다. 면적대비 경미한 파손으로 볼 수 있으나, 구조물의 경우 3차원 형상을 띠고 있으므로 파손 체적에 대해서도 정량적인 수치를 검출할 필요가 있다. Table 10은 앵커의 파손부위에 대한 체적을 검출한 값이다. 파손 체적이 가장 크게 나타난 것은 6번 앵커의 B-1 지점이며, 전체 파손 체적은 8번 앵커가 가장 크게 검출되었다. 3번 앵커의 경우 파손 면적이 제일 크게 측정되었으나, 파손 체적이 낮게 검출된 것은 3번 앵커의 파손이 표면부만 파손이 발생한 것으로 볼 수 있다.
Table 10.
Detecting failure volume of anchor head by 3D model (unit : cm3)
| No. anchor | Design volume | Failure volume | Total | |||
| B1 | B2 | B3 | B4 | |||
| 2 | 538,973 | 130 | - | - | - | 130 |
| 3 | 1,792 | 21 | 264 | 108 | 2,185 | |
| 4 | 1,258 | 25 | 261 | - | 1,544 | |
| 6 | 2,256 | 32 | - | - | 2,288 | |
| 7 | 1,812 | - | - | - | 1,812 | |
| 8 | 2,125 | 1,488 | - | - | 3,613 | |
앵커 두부의 파손 발생에 대해서 유지관리 측면에서 균열과 지반 밀착도 등과 같이 측정이 어려운 손상인자의 경우 육안관찰에 의해 정성적 평가로 상태평가를 수행하고 있다. 정성 평가에 의한 점검 결과 데이터는 정확한 정량적 기준이 제시되지 못하기 때문에 시간이력에 따른 발생 정도를 파악하는 것은 불가능하다. 반면에 본 연구에서 구현한 3차원 수치모형에서는 정사투영을 통해 파손 면적과 파손 체적의 정량적 수치 검출이 가능하였다. 현재 파손에 대한 정량적 평가지표는 마련되지 않은 상태이지만 이러한 기초자료가 축적된다면 유지관리의 정량적 기초자료로써 활용이 가능할 것으로 기대된다.
3.4 지반 밀착도 및 회전변위 분석
앵커 수압판의 경우 앵커의 긴장력을 지반에 균등하게 분산하여 전달시키는 목적으로 사용되고 있으며, 지표면과 완전히 밀착될 때 제기능을 발휘한다. 이에 따라 성능평가 기반 비탈면 보강공법의 평가지표에서 보강공 두부와 지반 밀착도는 ‘유격 없음’, ‘일부 유격 발생’ 그리고 ‘전체적인 유격 발생’의 3개의 지표로 정성적으로 평가하고 있다. 전체적인 유격이 발생할 경우에는 보수·보강이 적용될 수 있지만, 일부 유격 발생 상태일 때는 보수·보강 적용이 점검자의 판단에 의해 좌우될 수 있다. 지반 밀착도의 유격 발생 진행정도를 파악하기 위해서는 위와 같은 정성적 평가 자료로는 어려우므로, 정확한 유격 발생 위치와 정도를 수치적으로 파악함으로써 시간이력 관리가 필요하다.
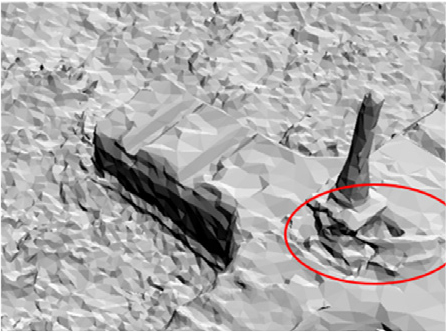
연구대상 비탈면은 심한풍화에서 풍화잔류토의 양상을 띠고 있으며, 불규칙한 표면으로 인한 국부적인 지반 밀착도의 유실 발생가능성이 높다. 본 연구에서는 임의로 지반침하를 발생시켰으며 UAS 3차원 수치모형에서는 앵커 저면과 지반 표면의 위치에서 사각지대가 발생하여 지반밀착도에 대한 검측이 불가능하였다. Fig. 8(a)는 UAS 기반 3차원 수치모형을 Mesh로 나타낸 것이고, Fig. 8(b)는 LiDAR의 점군 데이터로 나타낸 것이며, Fig. 8(c)는 (a)와 같이 LiDAR 점군 데이터를 Mesh 처리한 결과이다. Fig. 8(d)는 UAS 영상 이미지 해석 후 LiDAR 점군 데이터를 삽입하여 재가공 후 Mesh 처리한 조합해석 3치원 수치모형 결과이다. UAS 기반 3차원 수치모형 (a)의 경우 앵커의 저변 형상에서 이미지 왜곡이 크게 발생한 모습을 보이고 있으며, (b)의 LiDAR 점군 데이터의 경우 지반밀착도가 나타나지 않았다. LiDAR 점군 데이터를 (a)와 같이 Mesh로 표현할 경우 블랭크 구간이 발생하여 측정이 어려웠다. (d)의 경우 3차원 수치모형 형상이 LiDAR 데이터를 이용하여 정합 및 재가공된 결과물로 이미지의 왜곡과 LiDAR 점군 데이터의 사각지대 등을 보완하여 보다 정밀한 3차원 수치모형 구현이 가능하였다.

UAS 영상 이미지로 구현한 3차원 수치모형은 z 좌표에서는 x, y 좌표의 오차보다 높은 오차 범위가 발생하며, 고도에 따른 촬영 각에 의해 사각지대가 존재한다. 특히, 요철 구조물로 앵커와 지반의 접촉면에 이런 사각지대가 다주 존재하며, 이를 보완하기 위해 지상 LiDAR를 조합한 3차원 수치모형으로 Table 11의 지반 침하에 대한 측정값 검출 가능성을 확인하였다.
Table 11.
Detecting settlement by 3D model (unit : m)
지반침하는 앵커 1번, 7번 그리고 10번에서 발생하였고 앵커의 회전 변위는 2번, 5번, 6번 및 7번에서 발생하였다. 앵커 7번과 10번에서 0.1m 이상의 지반 침하가 관찰되었고 앵커 두부의 저면과 지반 표면과의 밀착도를 측정하였다. 지반의 불규칙한 요철을 고려하여 20개 지점에 대한 표고차를 평균으로 지반과의 밀착도를 Table 12와 같이 나타내었다. 7번 앵커의 경우 지반 침하가 평균 0.081m 발생하였고, 10번 앵커는 경우 평균 0.126m의 지반침하가 발생한 것을 확인하였다.
Table 12.
Detecting settlement below anchor head by 3D model (unit : m)
| No. anchor | Detecting 20 points of settlement | Average settlement |
| 7 |  | 0.081 |
| 10 |  | 0.126 |
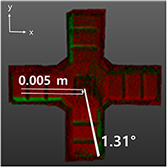
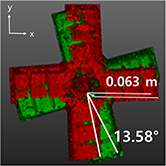
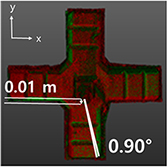
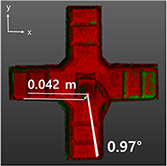
앵커 두부의 지반밀착도와 관계된 손상인자로 회전변위를 고려할 수 있다. 앵커의 두부는 인장하중이 수직력으로 직접 작용하고 지지력은 지표면의 편평도에 따라 좌우된다. 성능평가 지표에서는 앵커 두부의 회전변위에 대해 다루지 않고 있지만 지면과의 미세 유격 발생 또는 앵커의 긴장력 완화로 인장하중 감소로 인한 수직력 저하를 간접적으로 나타낼 수 있으므로 지반 밀착도와 관련되어 평가하는 것을 고려할 필요가 있다. Table 13에서 앵커의 회전체 이동은 UAS와 지상 LiDAR 조합 3차원 수치모형을 중첩시켜 확인한 결과, 변위가 크게 발생한 5번의 경우 측정이 가능하지만, 2번, 6번 및 7번과 같이 미세한 이동을 한 경우에는 식별이 어려웠다. 이에 다음 Table 13은 2회, 3회 차 UAS와 지상 LiDAR 조합해석 3차원 수치모형에서 UAS 이미지에서 점군 데이터를 추출하여 변위 이동각에 대해 캡 중앙을 기준으로 비교 측정한 결과이다. 앵커의 변위는 5번 앵커에서 회전각 13.58°, 변위는 0.063m로 가장 크게 나타났으며, 그 외 앵커의 회전각이 1° 이내의 경우에도 검출이 가능하였다.
Table 13.
Detecting rotational displacement of anchor head by combining 3D model








3.5 고찰
위의 분석 결과를 통해 비탈면 앵커 보강공법의 상태손상 인자로 균열, 파손, 변위와 지반침하량에 대해 UAS 영상기반 3차원 데이터와 지상 LiDAR의 3차원 점군 데이터를 병합하여 포인트 간 삼각망을 재구성하는 방식으로 조합해석을 수행하여 구현한 3차원 수치모형에서 수치 값 검출이 가능하였고, 이를 통해 정략적 성능평가기반의 유지관리 적용 가능성을 확인할 수 있었다.
균열의 경우 UAS의 카메라 해상도에 따라 균열 폭에 대한 오차의 차이가 있지만, 0.3mm 미만의 균열 폭에 대하여 검출이 가능하였다. 또한, 파손에 대해서도 파손 면적과 체적 검출이 가능하였다. 하지만 UAS 영상 이미지에서는 앵커와 지면의 접착면적에서 데이터 공백이 있으며, 미세한 앵커 두부의 변위와 지반침하량에 대한 수치 값은 검출이 불가능하였다. 이미지 데이터는 넓은 면적의 3차원 데이터를 빠르게 취득할 수 있지만, 이미지의 중첩과 해상도, 카메라 내·외부 보정요소 오차 등에 의해 정확도가 결정되는 단점이 있다. 반면에, 지상 LiDAR의 3차원 점군데이터는 데이터 특성상 영상에 의한 면분석이 제한되는 단점이 있어 균열과 파손에 대한 정밀도는 이미지 분석보다 낮을 수 있다. 본 연구에서는 레이저 스캔으로 점군데이터 획득시 앵커의 상부면의 사각지대로 인해 비가시 영역으로 데이터 공백이 발생하여 균열과 파손에 대한 수치 값 검출이 어려웠으나, 앵커 두부의 변위와 지반침하량에 대해서는 높은 밀도의 3차원 점군 데이터를 활용하여 수치 값 검출이 가능하였다.
비탈면의 3차원 수치모형에서 상태손상 인자를 검출할 때, 이미지기반 3차원 데이터로는 균열과 파손 등 면분석에 의한 활용에 높은 적용 가능성을 나타내었다. 그렇지만 변위와 지반침하와 같은 손상에서는 LiDAR의 점군 데이터를 활용하는 것이 이미지보다 높은 정확도와 정밀도로 활용이 가능한 것을 확인하였다.
본 연구는 UAS 영상과 지상 LiDAR 데이터를 조합해석한 3차원 수치모형에서 비탈면의 앵커에 대한 손상인자 검출을 목적으로 테스트베드에서 진행한 것으로 지반구조물의 가장 큰 방해요소인 식생에 대한 영향을 최소화하여 수행하였다. 실제 도로비탈면의 경우에 식생과 주변 장애물의 영향으로 높은 중복도의 UAS 이미지 데이터 수집과 지상 LiDAR 점군 데이터 취득이 용이하지 못할 수도 있다. 본 연구에서는 UAS와 지상 LiDAR를 활용하였지만, 드론 LiDAR, 지상 카메라로 영상 이미지 취득 등 다양한 장비의 조합으로 각 비탈면의 방해요소를 최소화하여 3차원 데이터 수집이 가능할 것으로 판단되며, 다양한 방식으로 조합해석한 3차원 수치모형 구현에 대해서는 추가적인 연구가 필요하다. 본 연구 결과로부터 영상 이미지를 통한 손상인자 검출과 점군 데이터를 통한 손상인자 검출에는 분명 차이가 존재하고 이를 조합한 3차원 데이터로 수치모형을 구현할 경우 유지관리 측면에서 상태손상 인자에 대한 높은 정확도와 정밀도 확보가 가능할 것으로 판단된다.
4. 결 론
비탈면에 설치된 앵커의 정략적 유지관리를 위한 영상정보 기반 성능평가의 효용성을 확인하기 위하여 UAS 영상과 지상 LiDAR를 조합해석한 3차원 수치모형을 구현하고 정확도와 재현도를 검증하였다. 또한 앵커 두부의 균열, 파손 및 변위 그리고 지반밀착도 등의 정량적 수치를 검출하였고 이를 유지관리 측면에서 검토하여 다음과 같은 결론을 얻었다.
(1) 비탈면과 같은 수직구조물에서 UAS 영상기반 3차원 수치모형의 z 좌표의 오차가 x, y 좌표 보다 상대적으로 크게 발생하며, 특히나 앵커가 설치된 요철구조물의 경우 촬영 각도에 따른 사각지대로 인한 데이터 공백이 발생한다. 이를 보완하기 위하여 지상 LiDAR 스캔 데이터를 조합하여 3차원 수치모형을 구축하였으며, 두 데이터의 상호보완으로 z 좌표의 정확도가 향상되었음을 확인하였다.
(2) 3차원 수치모형 구축을 통해 균열의 경우, 해상도에 따른 정확도 차이를 확인하였으며, 8K 해상도의 3차원 수치모형에서는 ± 0.05mm 오차 범위로 0.3mm 미만 균열 검출이 가능하여 유지관리 측면에서 유의미한 결과를 도출하였다.
(3) 3차원 수치모형은 약 95%의 재현도로 구현되었으나, 비탈면에 설치된 앵커의 경우 식생과 자갈 등의 영향으로 왜곡이 발생하여 설계면적 대비 6.3∼17.2%의 오차가 발생하였고 이와 같은 방해요소를 해결하기 위한 추가적인 연구가 필요하다.
(4) 파손은 면적과 체적의 수치 값 검출이 가능하였고 앵커 수압판의 파손 면적은 설계대비 0.2∼3% 수준으로 검출되어 정성적 평가로는 경미한 손상으로 볼 수 있다. 현재 앵커 파손에 대한 정량적 평가지표는 정립되지 않은 상태이나 3차원 수치모형에서 검출한 수치 데이터가 축적된다면 유지관리 측면에서 정량적 평가의 기초자료로써 활용이 가능할 것으로 기대된다.
(5) z 좌표 데이터가 중요한 앵커의 지반밀착도의 경우 UAS 3차원 수치모형에서는 고도의 촬영 각도와 요철구조물의 사각지대로 인한 낮은 중복도로 구현되어 검출이 불가능하였으나, 지상 LiDAR의 점군데이터를 조합해석한 3차원 수치모형에서는 지반의 표고차 측정이 가능하여 7번 앵커의 경우 0.081m, 10번 앵커에서는 0.126m의 지반침하가 발생한 것을 확인하였다. 앵커두부의 회전변위는 2번, 5번, 6번 그리고 7번 앵커에서 발생하였고 1° 이내의 미세 회전각도 측정이 가능하였다.
(6) 본 연구를 통해 이미지기반 3차원 수치모형은 균열과 파손 등 면분석에 의한 활용이 높은 적용 가능성을 나타내고, 변위와 지반침하와 같은 손상에서는 LiDAR의 점군 데이터를 활용하는 것이 이미지보다 높은 정확도와 정밀도로 활용이 가능한 것을 확인하였다. 따라서, UAS와 지상 LiDAR의 데이터 조합 3차원 수치모형을 통해 각 방법의 장점을 부각하고 단점이 보완되는 효용성을 확인하였다.
