

1. 서 론
2. FDTD 수치해석
2.1 지반의 재료 물성
2.2 해석 모델
2.3 데이터 처리
3. Gain Recovery
3.1 자동 이득 제어(Auto Gain Control, AGC)
3.2 AGC 적용 결과
4. 다중 관로 신호 특성 분석
4.1 수평 배치
4.2 수직 배치
5. 결 론
1. 서 론
전 세계적인 도시집중 현상이 가속화됨에 따라 도시 자원 및 인프라 부족, 교통혼잡, 에너지 문제 등 도시문제가 증가하고 있다(Hwang and Song, 2019). 이러한 도시문제(교통 혼잡, 환경 훼손, 교통 혼잡 등)를 해결하고 시민 삶의 질 향상을 위해 지하공간에 대한 관심이 증가하고 있다.
도심지 지하에는 도시의 기능을 원활하게 하기 위한 많은 인프라 시설물들이 매설되어 있는데, 상하수도관, 전력구 및 케이블, 가스관, 지하철 및 터널 등 다양한 인프라 시설물이 매설되어 있다. 특히 상하수도관, 전력구, 케이블, 가스관과 같은 관로들은 도심지 지하에 복잡하게 얽혀 있다. 또한 다른 지중 시설물에 비해 지상과 가깝게 매설되고 관로들이 서로 근접해 매설되어 있는데, 이에 따라 많은 사고가 발생하고 있다. 2020년 서울특별시 은평구에서는 수도권광역급행철도 시공 현장에서 CIP 천공 작업 중 상수도관을 파손하는 사고가 발생하였으며, 2023년 6월에는 광주 지하철 2호선 공사 현장에서 상수도관이 파열되는 사고가 발생하였다. 또한 같은 해 9월에는 제주시에서 상수도관 공급망 정리 작업 과정에서 상수도관이 파열되는 사고가 발생하였다. 따라서 지하공간의 원활한 개발을 위해서는 지중에 매설된 시설물에 대한 위치정보를 정확하게 파악하는 것이 필요하다.
지중에 매설된 시설물의 위치정보를 파악하는 방법의 하나로 비파괴 탐사를 이용할 수 있다. 비파괴 탐사는 탐사를 수행하고자 하는 물체의 손상을 주지 않고 내부를 탐사할 수 있는 기술로 토목 분야에서는 주로 크랙 탐지, 공동 탐지, 내부 철근 탐지 등에 이용되고 있다. 이때, 지하 매설물의 위치 파악 및 각종 용도로 사용되는 비파괴장비로 사용할 수 있는 것이 바로 지표 투과 레이더(Ground penetrating radar, GPR)이다.
GPR은 비파괴 탐사 기법의 하나로 전자기파를 지하로 방사하여 전기적 특성이 다른 매질에서 반사되는 신호를 측정하고, 다양한 신호처리 기법을 활용하여 지층 및 지중 구조물의 위치와 형태를 규명하는 탐사 방법이다. 전자기파는 서로 다른 매질의 경계면에서 일부는 투과되고 일부는 반사되어 파가 진행된다. 전자기파의 전파속도, 파장은 전자기파가 통과하는 각 매질의 특성(유전상수, Dielectric Constant)에 따라 달라지고, 반사 특성은 두 매질 간 유전상수 차에 의존한다. 그러므로 매질의 특성과 전자기파가 매질을 통과한 시간을 알 수 있다면 매질 층의 두께 및 위치를 파악할 수 있고, 두 매질 간 경계면, 내부균열 및 공동의 존재 여부 및 심도, 위치, 규모 등을 밝혀낼 수 있다(Hong, 2005).
지하 다중 관로의 경우 단일 관로와 달리 관로의 배치에 따라 신호 전파에 영향을 미치는 음영영역이 형성될 수 있다. 음영영역에 관로가 있는 경우, 신호가 전파되지 않기 때문에 반사 신호가 관측되지 않는다. 음영영역의 외부에 있는 경우, 방출된 신호는 여러 관로에 의해 반사되어 수신되며, 이는 개별 관로를 탐지할 때와 상당한 차이를 보인다. 그러므로 다중 관로 환경에서는 관로의 위치와 배치가 신호 형태에 미치는 영향을 면밀히 분석하는 것이 중요하다. 이를 활용하면 GPR 탐사 결과를 이용하여 지중의 다중 관로 여부와 관로의 배치 형태를 파악할 수 있을 것으로 기대된다.
GPR 탐사 결과를 분석하는 연구는 과거부터 지속적으로 연구되어 왔다. Ni et al.(2010)은 GPR원시 데이터를 필터링하고 향상하는 이산 웨이블릿 변환(Discrete Wavelet Transform) 신호처리기술을 도입하여 실험을 수행하고 GPR 탐사 결과를 분석했다. 해당 연구에서는 관로의 재질을 중점으로 수직, 수평으로 배치 시 신호 특성을 분석하였다. Yuan et al.(2018)은 다중 관로의 위치, 치수 등을 자동으로 탐지 하기 위한 연구를 수행하였는데 Drop-flow 알고리즘을 사용하여 관로 신호를 자동으로 구별하여 식별하는 연구를 수행하였다. Al-Nuaimy et al.(2000)은 다양한 적대적 생성형 신경망을 활용하여 다수의 GPR 신호를 모사하고 이를 활용하여 CNN 학습을 진행하여 자동 탐지 모델을 개발하는 연구를 수행하였다. Bae et al.(2023)은 객체 탐지 딥러닝 모델 중 하나인 YOLO를 활용하여 터널의 강지보재를 탐지하는 연구를 수행하였다. Go and Lee(2021)는 터널 라이닝 공동에 대한 GPR 신호 특성을 분석하기 위해 터널 라이닝 모형을 gprMax를 통해 시뮬레이션하여 그 특성을 분석하는 연구를 수행하였다. Hong et al.(2015)은 지반의 이완구간의 심도를 추정하기 위해 GPR을 사용하였으며, 그 결과를 콘관입시험을 통해 검증하였다. 그러나 다중 관로의 배치, 크기에 따른 신호 특성의 변화에 대해 구체적으로 연구된 바가 없어 이에 대한 연구가 필요하다.
다중 관로에 의한 신호 특성을 분석하기 위한 방법으로 수치해석 기법을 활용하였다. 수치해석 기법은 변인 통제가 원활하여 다중 관로에 의해 발생하는 반사 및 산란 효과만 고려할 수 있다. 또한 관로의 위치, 크기, 개수 등의 다양한 환경요인을 변경하며 해석을 수행하고 그 결과를 분석함으로써 각각의 변수에 따른 결과의 변화 추세를 파악할 수 있다. 시간영역 유한차분법(Finite Difference Time Domain, FDTD) 수치해석의 경우, 손실, 이방성, 분산 등의 특성이 고려된 복합 매질에 대한 시뮬레이션이 가능하며, 해석 영역을 격자 형태로 분할하여 연산을 수행하기 때문에 GPU를 활용한 병렬 해석이 가능하다는 장점이 있다.
본 연구에서는 FDTD 수치해석기법을 활용하여 다중 관로에 의한 GPR 탐사 신호 특성을 분석하였다. 이를 통해 관로의 형상 및 배치에 따른 관로 탐사 가능성에 대해 연구하였다.
2. FDTD 수치해석
시간영역 유한차분법은 해석을 수행하고자 하는 모델에 대해 시간 및 공간을 유한한 개수의 Yee 셀로 이산화한 후, 맥스웰 방정식을 이용하여 미소 시간영역에 대한 수치 연산을 반복 수행하여 해석을 수행한다(Lee et al., 2022). 맥스웰 방정식은 기본적으로 3차원으로 구성되어 있으나, 한 개의 차원을 소거하여 2차원 해석을 진행할 수 있으며, 식 (1) 같이 나타낸다. 이러한 맥스웰 방정식을 미소크기의 공간과 시간 증분에 대한 차등 방정식으로 변환시켜 전계와 자계의 전파 현상을 시간영역에서 해석한다(Kim and Yang, 1997). Fig. 1(a)는 3차원상 Yee cell을 의미하며, (b)는 2차원 해석 시 제거되는 요소를 표기한 그림이다.

Fig. 1
Single FDTD Yee cell showing electric (red), magnetic (green), and zeroed out (grey) field components (Warren and Giannopoulos, 2023)
여기서, E는 전기장 강도(F/m), H는 자기장 강도(A/m), J는 전류 밀도(A/m3), M은 등가 자기 전류 밀도(V/m3), σ는 전기 전도성(S/m), σ*는 등가 자기 손실(Ω/m)을 의미한다.
Giannopoulos(1998)에 따르면, FDTD는 공간 및 시간 단계에 관련된 안정조건이 있다. 시간 단계의 안정조건에는 공간조건에 따라 상한 값이 존재하여 이를 초과하는 경우 수치적 불안정이 증가한다. 시간 및 공간의 안정조건은 식 (2)와 같이 나타낼 수 있다. 여기서 c는 광속을 의미하며, Δx과 Δz는 이산화 된 Yee 셀의 x, z축 요소의 단위길이, Δl은 Δx=Δy=Δz인 경우 단위 셀의 크기, λ는 송신신호의 파장을 의미한다. 따라서 송신되는 신호의 파장에 따라 이산화 되는 모델의 단위 길이의 최댓값이 결정되며, 이를 통해 미소시간의 최댓값이 결정된다.
해석 프로그램으로는 파이썬 기반의 오픈소스 프로그램인 gprMax를 이용하여 해석을 진행하였으며, gprMax에서는 GPU 연산을 지원하기 때문에 병렬 해석을 통한 해석시간 단축이 가능하다는 장점이 있다. 또한 Peplinski et al.(1995)가 제안한 재료 모델을 통해 기초적인 토질실험으로 획득할 수 있는 물성을 활용하여 전자기적 성질을 산출할 수 있는 Peplinski 재료 모델을 제공하며, 이를 활용하여 지반의 불균질성을 구현하여 해석을 수행할 수 있다.
2.1 지반의 재료 물성
지중 관로의 위치에 따른 GPR 탐사의 신호 특성을 분석하기 위해 지반의 재료 모델은 단일유전율을 갖는 균질지반으로 모델링하였으며, 지반 재료의 전기적 특성은 Peplinski 모델을 활용하여 토질의 기본 물성을 전기적인 물성값으로 변환하여 입력하였다. 변환에 사용된 Peplinski 모델은 식 (3)과 같이 나타낼 수 있다(Peplinski et al., 1995).
여기서, ε', ε"는 재료 유전율의 실수부 및 허수부, ε0은 진공상태에서의 유전율, ρs, ρb는 흙 입자의 밀도 및 토질의 체적밀도, εs, εw는 모래 입자의 상대 유전율 및 물의 유전율, mu는 함수비, S, C는 모래 및 점토의 함유율을 의미한다.
본 연구에서 사용된 지반재료의 입력 물성과 Peplinski 모델로 인해 변환된 전자기적 물성은 Table 1과 같다. 또한 재료 모델이 단극 Debye 분산을 적용하여 지반으로 인해 송신된 전파의 감쇄가 발생하도록 설정하였다.
Table 1.
Input parameters for ground
| Ground input parameters | S, C | ρs, ρb | mu | |||
| [0.5, 0.5] | [2, 2.66] | 0.125 | ||||
|
Electrical parameters using the Peplinski model | εr | σ (S/m) | μr | σ* (Ω/m) | ||
| 7.921 | 0.057 | 1 | 0 | |||
여기서, εr는 상대 유전율, σ는 전기 전도도, μr은 상대 투자율, σ*는 자기손실을 의미한다.
2.2 해석 모델
일반적으로 관로가 매설되는 심도는 6m내에 존재하여 탐사 심도는 6m정도로 설정하였으며, 왕복 이동거리를 고려하면 A-Scan 데이터는 약 12m에 해당하는 데이터를 얻는다. 따라서 B-Scan 데이터의 폭과 높이의 비율을 1:1로 맞추고자 송수신기의 이동거리는 12m로 설정하였다. 이때 해석 모델의 경계부분에는 흡수 경계 조건(Absorbing Boundary Condition, ABC)을 설정하여 경계에서 발생하는 반사를 제거해주어야 하기 때문에 해석 모델의 폭은 12m에 좌우 1m의 길이를 더해 14m로 설정하였다. 따라서 해석 모델은 폭 14.0m, 깊이 6.0m의 크기로 설정하였다.
해석을 위한 관로의 배치는 수평 배치(Case 1), 수직 배치(Case 2), 대각 배치(Case 3) 3가지로 구분하여 해석을 수행하였다. 수평 배치에서는 B-Scan의 쌍곡선 형태가 겹쳐서 나타나기 때문에 신호가 겹쳐서 나타나는 특성을 분석하고자 하였으며, 수직 배치에서는 신호가 가려지는 경우 발생하는 신호 특성을 분석하고자 하였다. 마지막으로 대각 배치의 경우, 수평 및 수직 배치의 신호 특성이 같이 나타나는 특성을 보일 것으로 생각하여 그러한 신호 특성을 분석하고자 하였다.
해석에 사용된 관로의 배치 형상은 Fig. 2와 같다. Fig. 2의 대각 배치(Case 3)는 관로의 위치 및 직경에 따라 Table 2와 같이 16가지로 구분 할 수 있으며, 이 중 P13과 P24는 x축으로 평행이동 된 데이터로 본 연구의 목적에서 중복되는 데이터로 구분할 수 있어 12개의 데이터만 활용하였다.
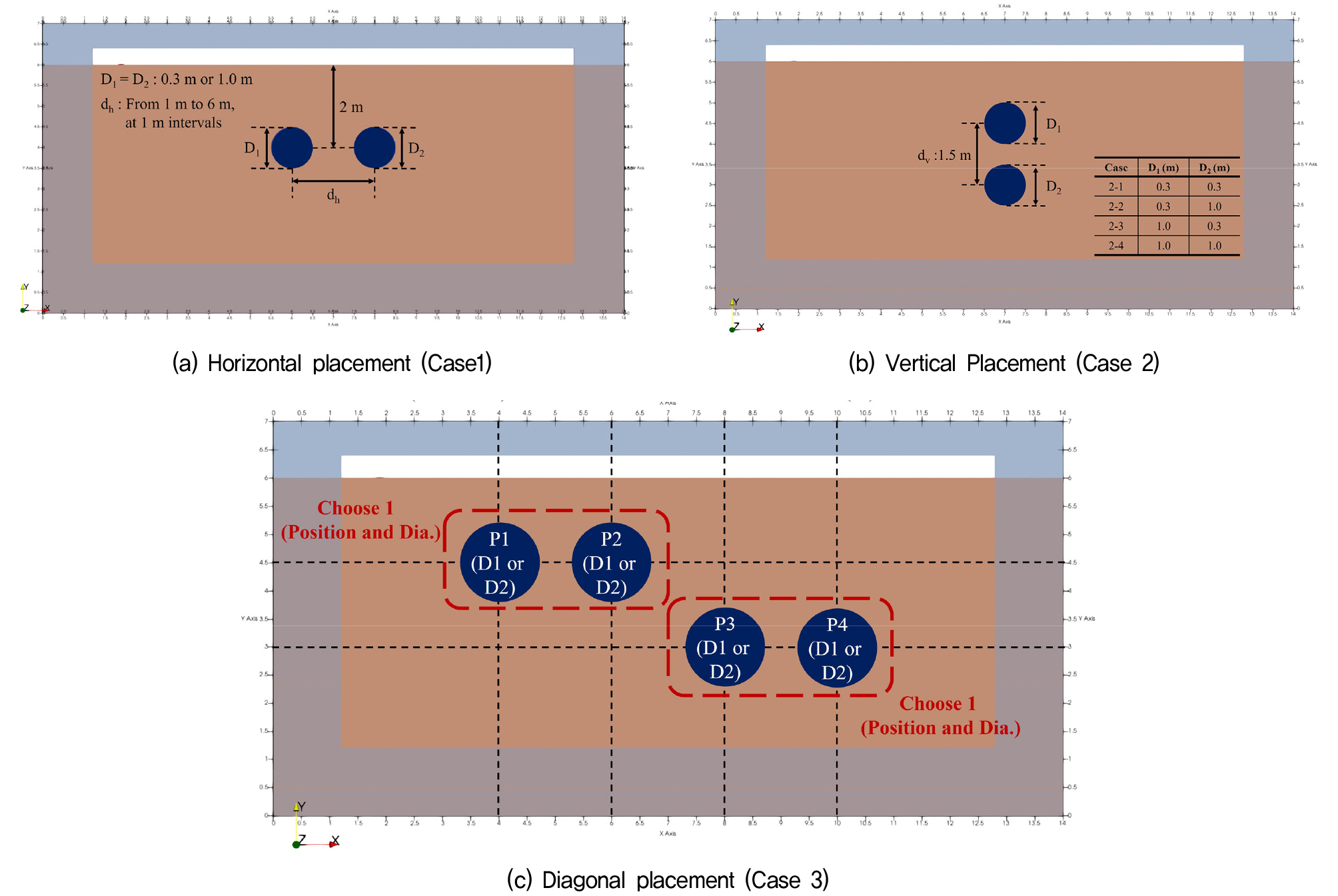
Table 2.
Conduit location and diameter case in diagonal placement
해석 모델의 경계 부분에는 흡수 경계 조건(absorbing boundary condition, ABC)을 200개의 셀에 적용하여 경계부에서 발생하는 반사파의 영향을 감쇄하였다.
2.3 데이터 처리
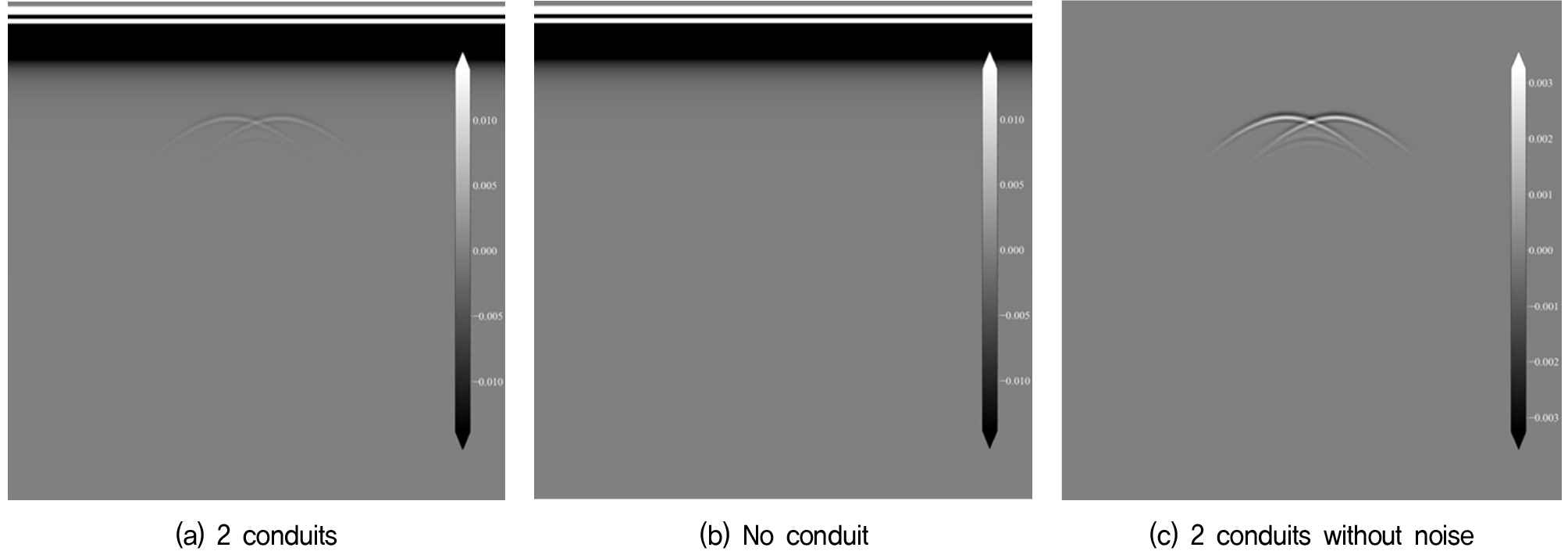
본 연구에서는 다중 관로에 의해 발생하는 반사파를 분석하기 위해 관로가 있는 해석데이터에서 관로가 없는 지반의 해석데이터를 제거하는 과정을 수행하였다. 이를 통해 지표면에서 발생하는 반사와 경계조건 등에서 발생하는 노이즈를 제거하였다. Fig. 3의 (a), (b)는 컬러맵(color maps)의 최댓값 및 최솟값을 해석데이터 최댓값의 10-4배로 도시한 B-Scan데이터 이며, (c)는 관로가 있는 해석 결과(a)에서 관로가 없는 해석 결과(b)를 제거하여 도시한 B-Scan 데이터이다.
수평으로 배치된 데이터의 경우, 지표면에서 관로의 상단부까지의 거리가 동일한 해석 조건으로 인해 두 관로에서 반사된 신호의 최댓값이 유사하게 나타났다. 이에 따라 B-Scan 데이터를 도시할 때, 컬러맵에서 최댓값이 유사하게 설정되어 두 관로에 대한 신호가 명확하게 분류 가능하다(Fig. 4).
그러나 두 관로의 깊이 차이가 있는 Case 3의 P23, D11 데이터의 경우, 상단에 위치한 관로의 반사 신호의 에너지가 하단에 있는 관로의 반사 신호 에너지에 비해 10-4배보다 작게 나타났다. 이는 분산모델에 의해 송신된 신호의 감쇄가 발생하는데, 신호의 이동 거리가 상단에 위치한 관로를 왕복하는 거리(2.0m) 보다 하단에 위치한 관로를 왕복하는 거리(5.0m)에 비해 2배 이상 짧기 때문에 신호의 감쇄가 덜 발생하여 에너지 차이가 큰 것으로 분석된다. 이에 따라 Fig. 5의 (a)와 같이 B-Scan 데이터에서 하단에 있는 관로의 신호는 보이지 않게 되어 깊이가 다른 두 관로를 탐색하기 위해서는 감쇄로 인한 에너지손실을 복원하여 비교해야 할 것으로 판단된다.

3. Gain Recovery
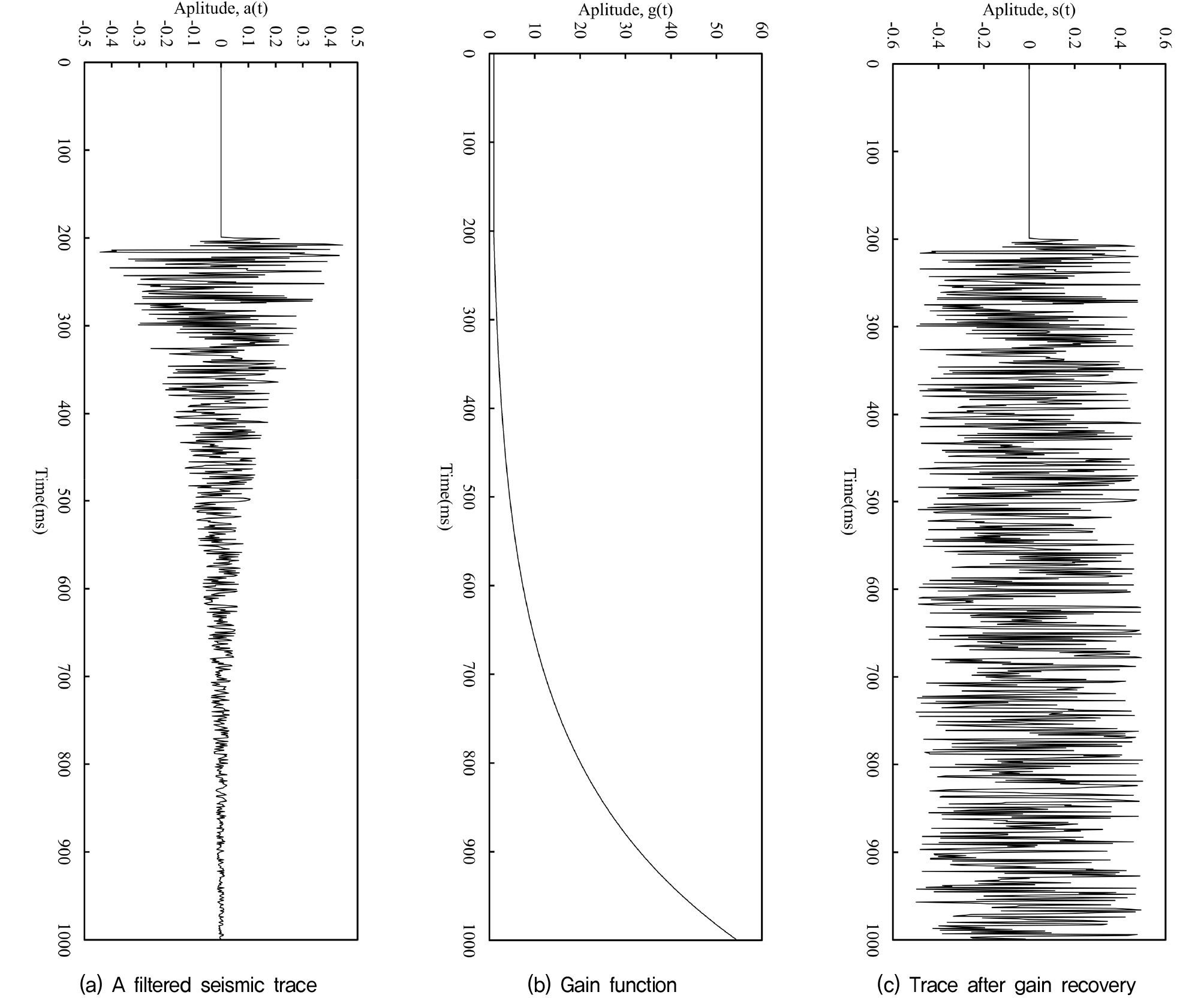
GPR 탐사를 통해 얻은 신호는 시간에 따라 점차 약화되어, 에너지 크기가 감소하는 경향을 보인다. 이러한 감쇄 현상으로 인해 관로의 심도에 따라 반사 신호의 에너지 차이가 벌어져 깊은 심도의 반사 신호는 매몰되어버려 반사파의 특징을 정밀하게 분석하기 어려워진다. 이러한 문제를 해결하기 위해 본 연구에서는 Fig. 6과 같은 방법으로 Gain recovery를 통해 신호를 증폭시켜 전체적인 에너지 크기를 통일함으로써 신호 간의 비교를 용이하게 하였다(Dondurur, 2018). Gain recovery는 식 (4)와 같이 나타낼 수 있다.
3.1 자동 이득 제어(Auto Gain Control, AGC)
Gain recovery 방법 중 Auto gain control(AGC) 기법을 도입하였다. 이는 일정한 Time window를 기반으로 각각의 신호 위치에서의 진폭을 증폭 혹은 감쇄하는 기법으로 신호의 형태는 유지하며 진폭의 크기 차이를 감소시킨다. Fig. 7은 Time window에 따른 중앙 샘플링 과정을 나타내는 그림으로, Time window내의 신호 데이터의 RMS, 평균, 중앙값 등의 역수를 활용하여 중심 값의 크기를 변화시키며 Gain recovery를 수행한다.
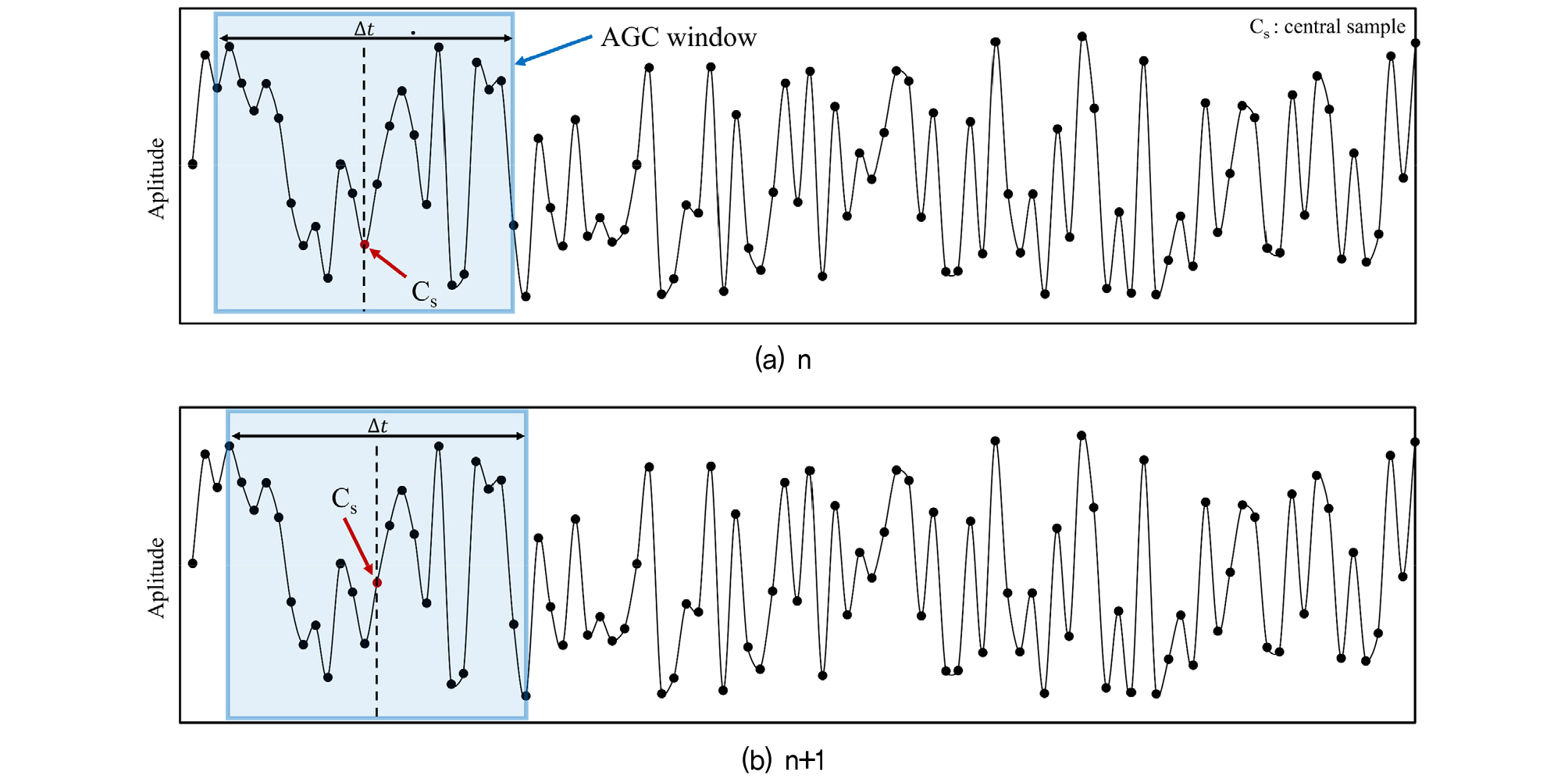
Yang et al.(2021)은 AGC 알고리즘을 식 (5)와 같이 나타내었다. Time window의 길이(Δt)와 gmax를 가정한 후, 매 신호샘플의 Δt/2 전, 후 범위에서 신호의 에너지의 역수를 계산하고 이를 전체 신호 범위에서 최솟값을 기준으로 정규화 한다. 이를 통해 각 신호 샘플에 해당하는 gnorm을 계산할 수 있으며, gmax 값과 비교하여 큰 진폭을 갖는 신호 샘플에 비해 작은 진폭을 강화할 수 있도록 조정한다.
3.2 AGC 적용 결과
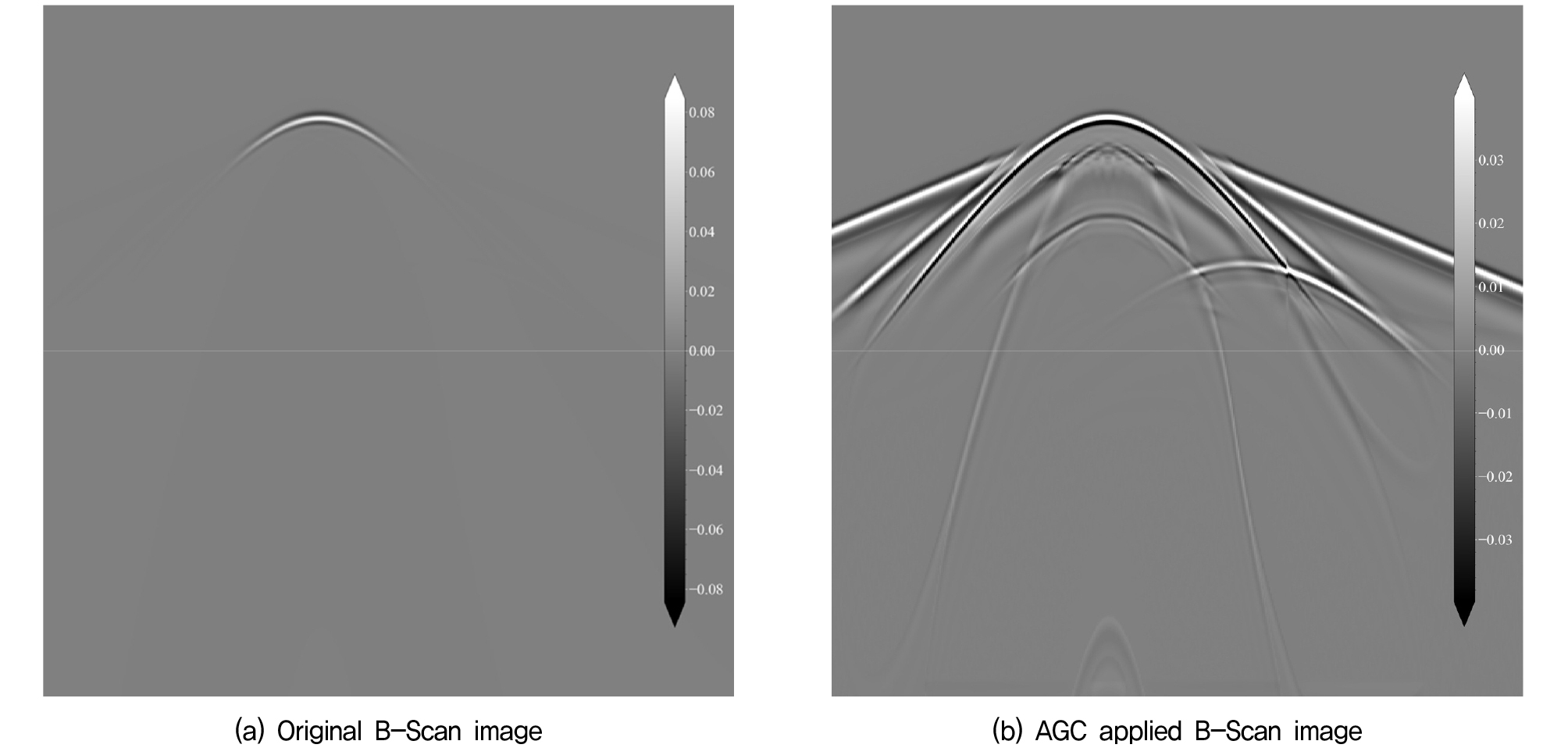
B-Scan 데이터는 A-Scan 데이터를 탐사 경로 방향으로 결합하여 구성한 데이터 세트다. 따라서 각각의 A-Scan 데이터에 AGC를 적용하여 B-Scan 데이터로 도시하여 결과를 확인하였다. Fig. 8은 AGC 적용 전후의 이미지를 도시한 그림이다. Fig. 8의 (b)는 AGC를 적용하여 상단 및 하단 관로에서 반사된 신호의 크기를 조정함으로써, 이들 간의 에너지 차이를 최소화하였다. 이러한 조정을 통해, 관로의 형상을 보다 명확하게 파악할 수 있었다.
4. 다중 관로 신호 특성 분석
지중 관로가 수평, 수직, 대각으로 배치됨에 따른 GPR 신호의 특성을 분석하기 위해 FDTD 수치해석을 수행하고 AGC를 적용하여 B-Scan 이미지를 구성하였다. 또한 관로에 의한 반사 신호의 영향만 분석하기 위해 배경 노이즈를 제거하고 신호 특성을 분석하였다.
해석 케이스별 다중 관로 모델의 위치를 정리하면 Table 3과 같이 나타낼 수 있다.
Table 3.
Conduit positions and diameter for each analysis case
4.1 수평 배치
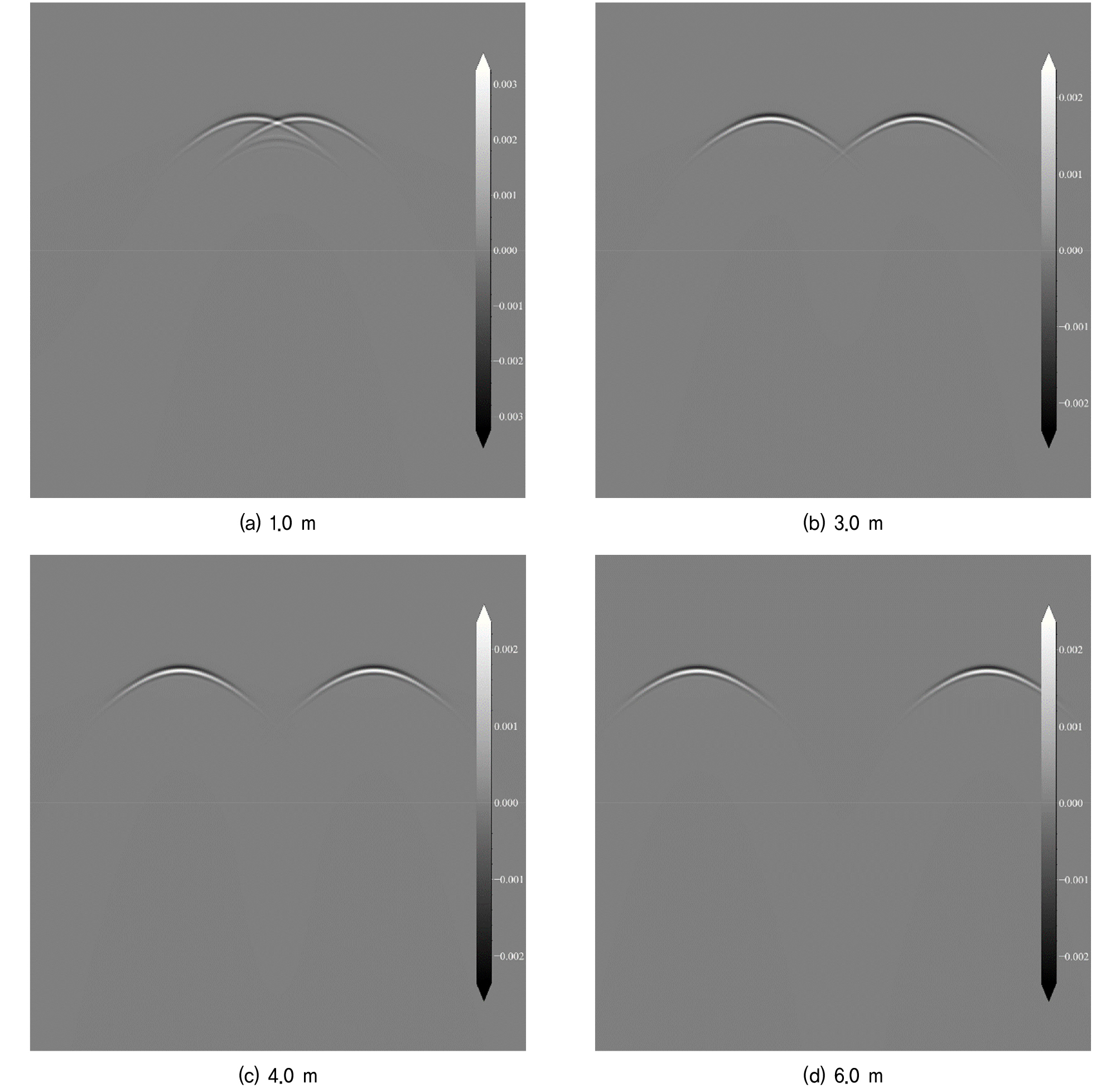
수평 배치의 경우, 관로 중심 간 거리(dh)를 1m에서 6m까지 1m씩 증가시키며 해석을 수행하였으며, 관로의 직경은 두 가지 케이스(0.3m, 0.5m)에 대해 해석을 진행하였다. 따라서 수평해석의 경우 총 12 개의 해석을 진행하였으며, 해석 결과를 AGC를 이용하여 처리하면 Fig. 9, Fig. 10과 같이 도시할 수 있다.


두 직경에 대한 해석 모두 관로 간 거리가 증가함에 따라 두 쌍곡선의 중첩 길이가 감소하는 것을 확인할 수 있다. 이를 Fig. 4의 결과와 비교하면 AGC를 활용하여 증폭을 한 경우, 육안으로 판별할 수 있는 쌍곡선의 크기가 증가한다. 이에 따라 AGC를 적용하기 전 B-Scan 이미지(Fig. 4의 (c))에서는 수평 관로 사이의 거리가 4.0m에서부터 두 쌍곡선의 중첩이 없는 것으로 확인되나, AGC를 활용하여 증폭시킨 Fig. 10(c)의 경우 두 쌍곡선의 형태가 명확하게 중첩되어 있는 것을 확인할 수 있었다.
Fig. 9(a) 및 Fig. 10(a)와 같이 dh가 1.0m 인 경우, 두 관로 간 최소거리가 각각 0.7m, 0m로 근접하게 된다. 관로가 수평으로 근접하게 위치한 경우, 송신된 신호가 두 관로에서 순차적으로 반사되어 수신되는 신호의 에너지와 한 개의 관로에서 반사되어 수신된 신호의 에너지가 유사하기 때문에 두 관로의 쌍곡선 신호의 중간에 새로운 쌍곡선 형태의 신호가 나타나는 것을 확인하였다.
4.2 수직 배치
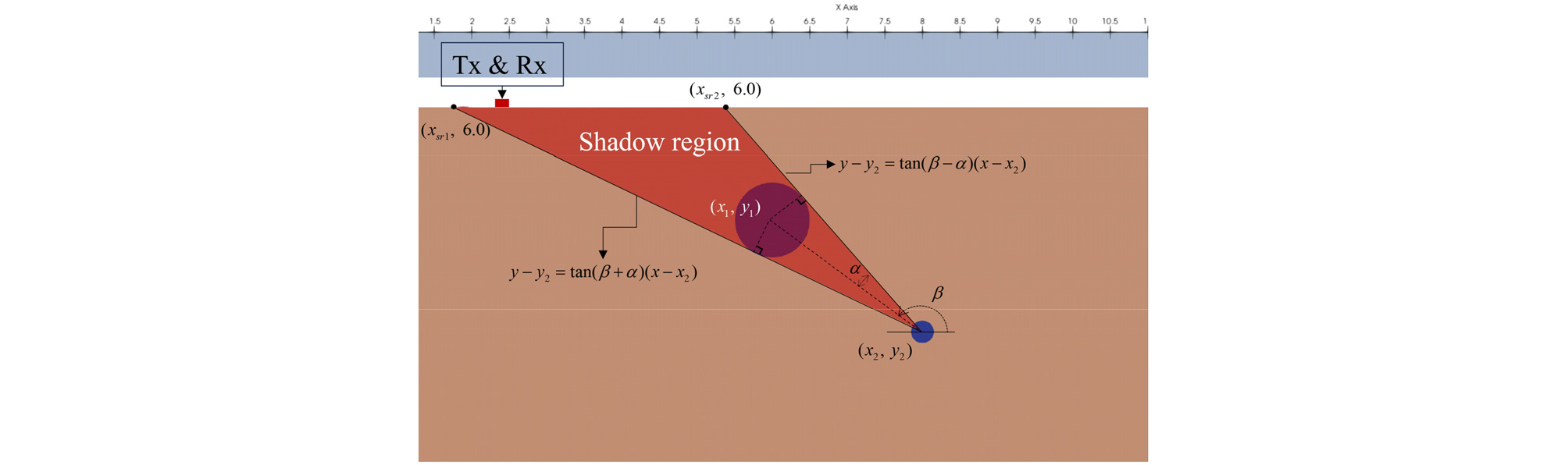
GPR 탐사에 있어서 수직으로 배치되어 있는 구조물을 탐사하기에는 많은 어려움이 따른다. 이는 상단에 물체에 의해 송신되는 신호가 닿지 않는 음영영역(shadow region)이 발생하기 때문이다. 그러나 음영영역 밖에서 송신된 전자기파는 관로에 반사되어 수신 가능하기 때문에 이를 활용하여 수직으로 배치되어 있는 관로가 탐사 가능한 조건을 분석하고자 하였다. 따라서 수직으로 관로를 배치하여 관로 크기에 따른 GPR 탐사 데이터를 분석하였다.
수직으로 배치된 관로에서 하단 관로가 상단 관로에 의해 가려지는 음영역역을 도시하면 Fig. 11과 같이 나타난다. 여기서 해석모델은 지반 6.0m의 깊이로 구성하였으며, 관로는 모델의 중앙(7.0m)에 위치시켰다. 상단의 송수신기(Tx & Rx)가 지표면에서 좌측으로 이동할 때, 하단의 관로에 신호가 닿지 않는 음영영역의 x 범위는 xsr1~xsr2 까지로 나타난다. xsr1~xsr2의 경우 하단 관로의 직경과는 상관없이 상단 관로의 직경만 계산에 사용된다. 상단 직경에 따른 xsr1~xsr2는 계산을 통해 Table 4에 작성하였다. lsr1 및 lsr2은 xsr1, xsr2에서 x2, y2까지의 거리를 나타낸 것으로 음영영역 경계에서 직선거리를 계산하였다.
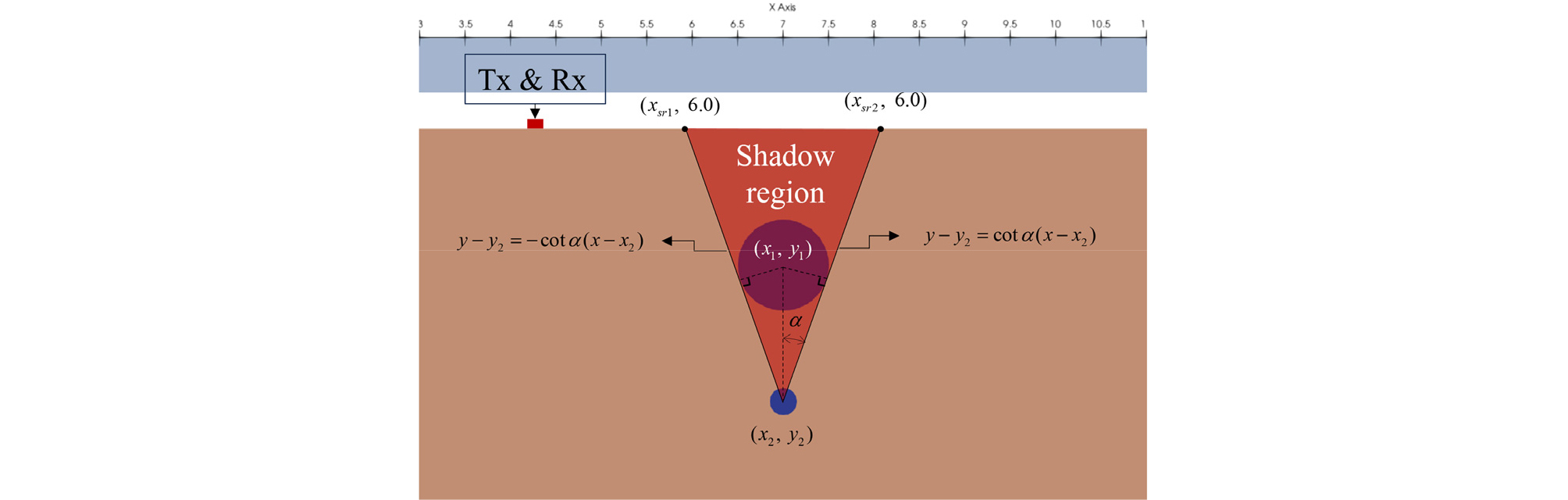
Table 4.
X-coordinate range of shadow regions based on the diameter of upper conduit
| Upper conduit diameter (m) | xsr1 (m) | xsr2 (m) | lsr1 (m) | lsr2 (m) |
| 1.0 | 5.939 | 8.061 | 3.015 | 3.015 |
| 0.3 | 6.698 | 7.302 | 3.015 | 3.015 |
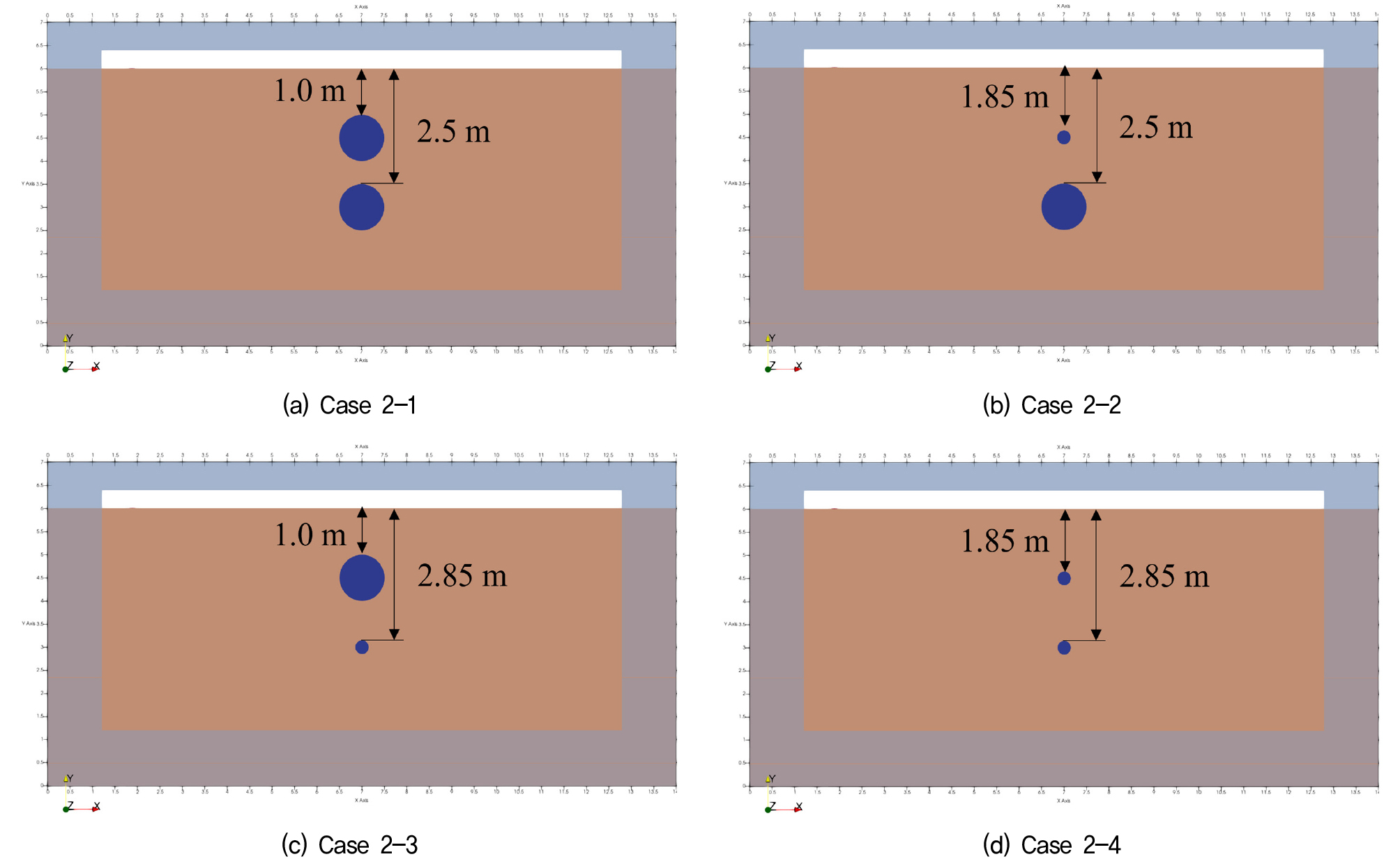
해석 모델의 구성은 Fig. 2의 (b)에 나타낸 것과 같이 구성하였으며, 각각의 모델을 그리면 Fig. 12와 같이 도시된다.
각각의 케이스에 대한 해석 결과는 Fig. 13에 도시하였다. 수직 배치에 대한 모든 해석 결과에서 하단 관로에서 반사된 신호는 반사 신호의 중앙부분에 극댓값이 나타나지 않는 것을 확인할 수 있는데 이는 상단 관로에 의해 신호의 이동경로가 가려지기 때문에 해당부분에서 상단 관로에 의한 반사 신호만 측정되기 때문이다.
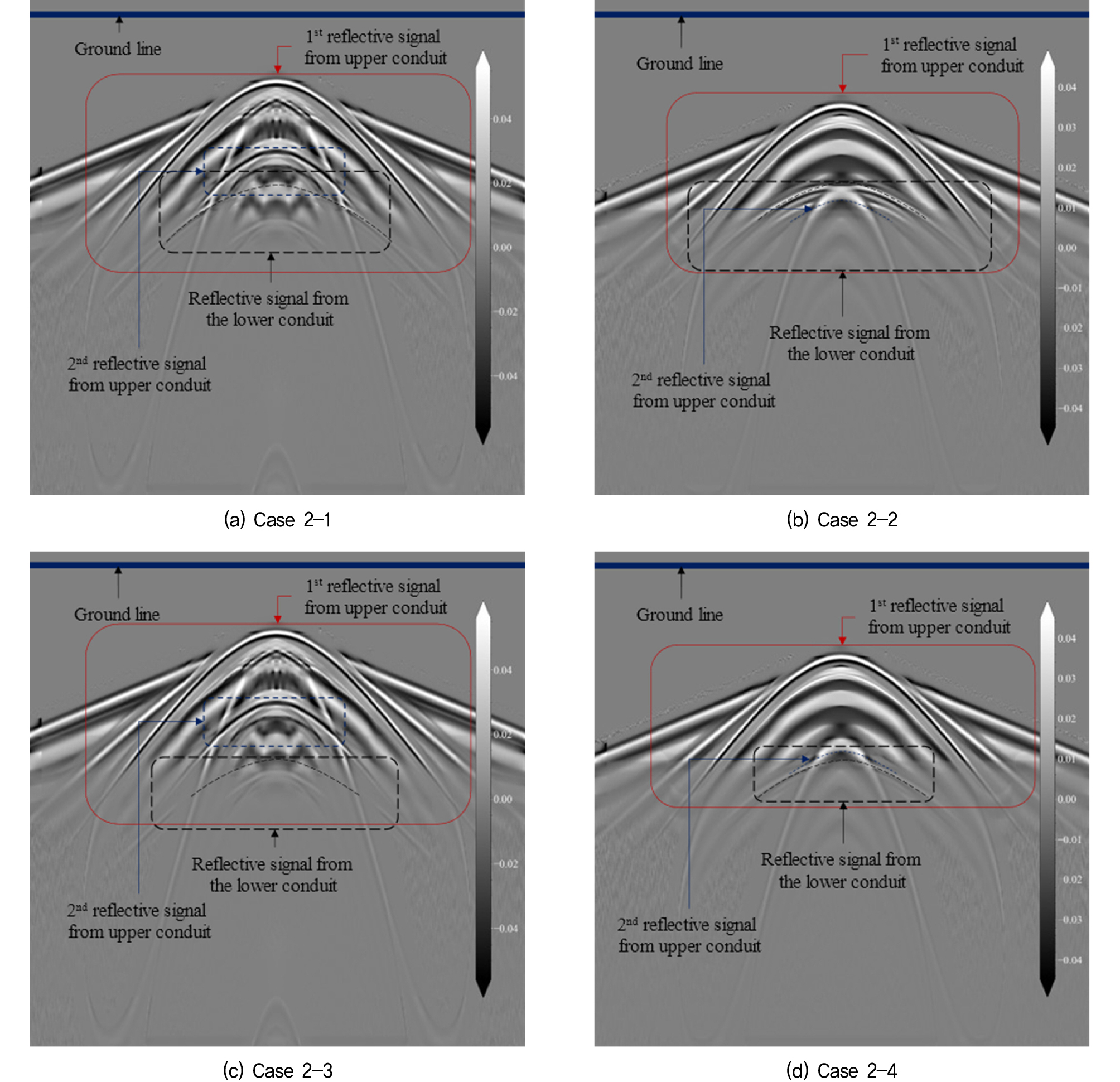
상·하단의 관로 직경이 같은 Case 2-1 및 Case 2-4의 경우, 송수신기와 상단 관로를 2회 왕복하는 길이에 비해서 하단 관로까지의 왕복 길이가 길어, 상단 관로의 2차 반사 신호가 측정된 후 아래쪽에 하단 관로에 대한 신호가 측정되는 것을 확인할 수 있다. 또한 중앙 부분의 신호는 상단 관로에 의해 가려져 좌, 우의 반사 신호만 측정되는 것을 확인할 수 있었다. 이렇게 좌우에 측정되는 신호를 활용하여 쌍곡선을 작도하면 관로 신호의 극댓값을 예측할 수 있을 것으로 사료된다.
상단 관로의 직경이 하단 관로의 직경보다 작은 Case 2-2의 경우, 상단 관로에 의해 가려지는 부분을 제외하고 좌우의 쌍곡선 형태가 뚜렷하게 나타나는 것을 확인할 수 있었다. 이러한 결과는 상단 관로에 의해 가려지는 신호에 비해서 하단 관로에서 반사되는 반사 특성이 상대적으로 더 큰 비중으로 측정되어 뚜렷한 쌍곡선 형태를 보이는 것으로 판단된다. 다만 쌍곡선 중앙 부분에서 상단 관로에 의해 가려지는 신호 특성 또한 보이며, 상단 관로의 직경과 하단 관로의 직경에 따라 반사 신호의 중심 부분의 왜곡이 커질 것으로 사료된다.
상단 관로의 직경이 하단 관로의 직경에 비해 큰 Case 2-3의 경우, 하단 관로의 반사특성이 상단 관로에 의해 거의 매몰되는 것을 확인할 수 있었다. 하단 관로의 신호가 좌우에 미약하게 확인이 가능하긴 하나 실제 지반의 경우 노이즈 및 지반의 불균질성으로 인해 아래의 신호는 노이즈와 구분하기 힘들 것으로 예상된다. 따라서 상단에 큰 관로가 위치하게 되면 하단 관로의 관측은 거의 불가능할 것으로 판단된다.
상단에 직경 1.0m의 관로가 위치할 때, 관로와 지표면에서 발생하는 메아리를 통해 지반 물성값에 따른 가탐심도를 측정할 수 있다. 본 해석에서 사용한 지반모델의 경우 메아리로 인해 관측되는 관로 신호가 3~4번 수준인 것으로 보아 본 해석의 지반모델에서 가탐심도는 약 4.0m인 것으로 판단하였다.
4.3 대각 배치
대각 배치의 음영영역의 경우 Fig. 14와 같이 도시할 수 있다. 수직 배치와 마찬가지로 음영영역의 경계를 나타내는 직선의 경우 상단 관로의 직경만 사용하여 계산한다. 그러나 대각 배치의 경우, 지상 음영영역의 크기는 수직 배치에 비해 크게 나타난다. 또한 대각 배치로 인해 반사 신호의 쌍곡선 형태가 대칭을 이루지 않는 데이터가 발생하는데, 이는 장비의 가탐심도 내에 하단 관로가 존재하지만 상단 관로에 의해 형성된 음영영역에 있으면 나타날 수 있다. 만약 상단에 대각으로 배치된 관로가 있으나, 하단 관로가 장비의 가탐범위를 벗어나 있는 경우, 두 관로는 GPR 데이터상 별개의 관로로 간주할 수 있다.
대각 배치의 경우 거리 및 직경에 따라 총 12 개의 해석을 수행하였으며, 해석 모델별 음영영역은 직경 및 관로 위치를 고려하여 Table 5에 나타내었다.
Table 5.
X-coordinate range of shadow regions based on the diameter of diagonal cases
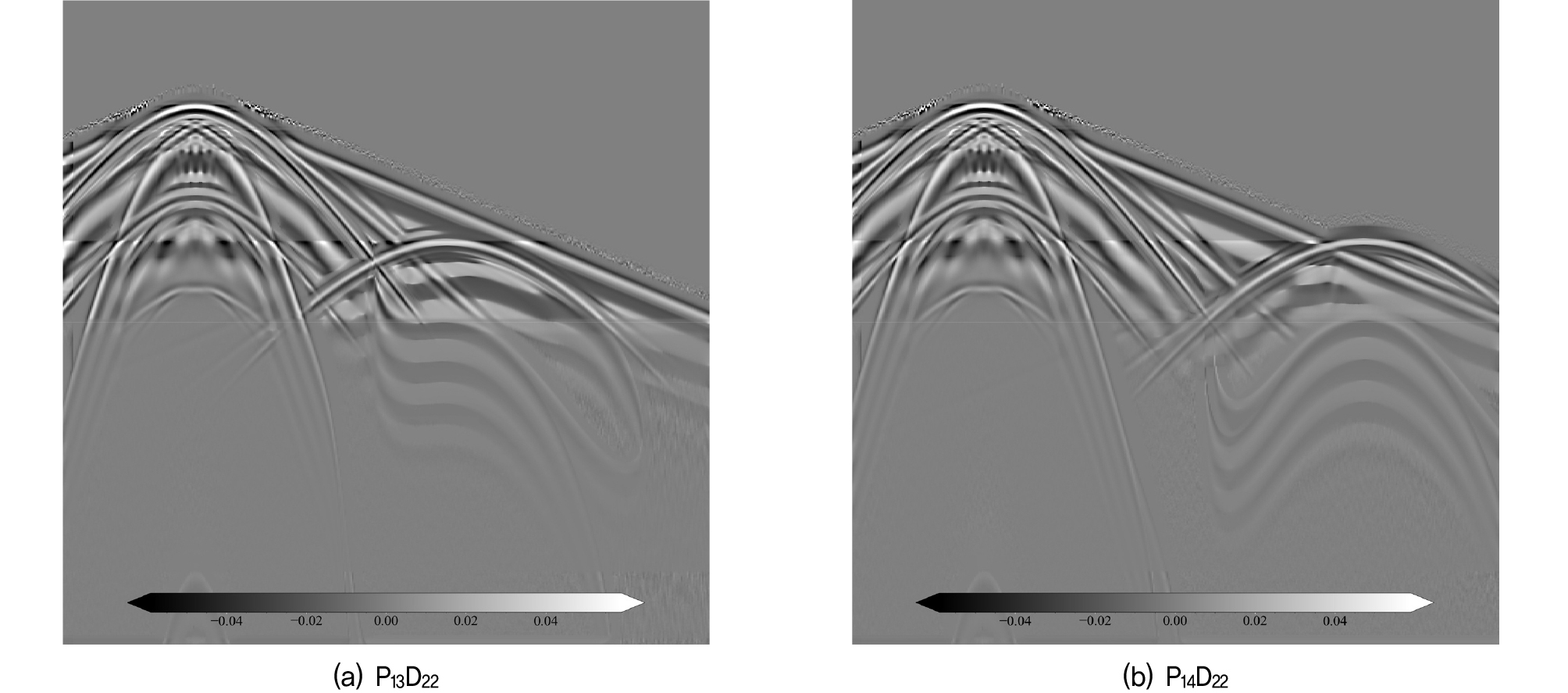
Table 5에서 P13 및 P14의 경우, 음영영역을 벗어나는 xsr2 위치에서 하단 관로까지의 최단 거리가 각각 6.046 m 및 8.870 m로 송신신호의 가탐범위를 벗어나게 된다. 따라서 P13 및 P14의 관로 배치에서는 상, 하단의 관로에 의한 반사 신호가 서로 거의 영향을 미치지 못하게 된다. P13, P14의 해석 결과에서 하단 관로까지의 거리가 가장 짧은 P13D22, P14D22의 결과는 Fig. 15와 같다.
P23의 경우, xsr2위치에서 하단 관로까지의 직선 거리가 가탐심도 내로 계산되었으며, 하단 관로에서 반사된 쌍곡선 신호가 비대칭으로 나타나는 것을 확인하였다. 특히 상단 관로의 직경이 큰 P23D21과 P23D22의 경우, xsr2이 5.337m로 상단 관로의 위치에서 0.663m 좌측에 위치한다. 이로 인해 하단 관로의 반사 신호의 극댓값을 기준으로 좌측은 음영영역에 포함되어 반사 신호가 관측되지 않았으나, 우측은 신호가 더 길게 관측된 것을 확인하였다. 이러한 결과는 Fig. 16에 나타내었다.

5. 결 론
본 연구는 FDTD 기법을 이용하여 다중 관로의 배치 형태에 따른 GPR 탐사 데이터에 대한 시뮬레이션을 수행하고 해석 결과의 분석을 통해 관로 배치에 따른 B-Scan 데이터의 특성을 분석하고자 하였다. 본 연구에서는 수치해석 기법의 장점을 활용하여 동일한 지반에서 관로 유무에 따른 해석을 수행하고 이를 활용하여 직접파 및 지반 재료에 의해 발생하는 노이즈를 제거하였다. 이를 통해 관로에서 반사된 신호만 중점으로 분석하였다. 또한 지반 재료에 의한 감쇄 효과를 보정하기 위해 자동이득제어 기법을 활용하여 신호의 이득을 조정했다. 이를 통해 수직 및 대각 배치 시 하단 관로의 반사 신호를 증폭하여 쌍곡선 형태에 대한 분석을 수행하였다. 본 연구의 결론은 다음과 같다.
(1) 관로가 수평으로 배치되어 있는 경우, 송신된 신호가 수평으로 배치된 두 관로를 순차적으로 거쳐 수신될 수 있을 정도로 가깝게 위치하면 두 쌍곡선의 중앙 부분에 새로운 쌍곡선 형태의 신호가 나타나는 것을 확인할 수 있었다. 이는 한 개의 관로에서 반사된 신호가 다른 관로까지 이동해 다시 반사되어 수신기로 들어오는 신호로 판단되며, 관로가 수평으로 매우 근접해 있다는 것을 의미한다.
(2) 관로가 수직으로 배치되어 있는 경우, 상단 관로에 의해 가려지는 음영영역 내에서는 반사 신호를 파악하는 것이 불가능하지만 음영영역 밖에서는 하단 관로에 의한 반사 신호가 관측되는 것을 확인하였다. 이를 활용하면 쌍곡선의 극댓값이 뚜렷하게 나오지 않아도 쌍곡선 함수를 유추하는 것이 가능할 것으로 사료된다. 다만 상단 관로의 직경이 하단 관로의 직경보다 큰 경우 음영영역 밖에서 하단 관로까지 왕복하는 거리가 증가하게 되어 GPR 장비의 가탐범위를 초과할 수 있다. 이 경우 하단 관로는 탐지가 불가능할 것으로 사료된다.
(3) 관로가 대각으로 배치되어 있는 경우, 상단 관로에 의한 음영영역은 증가하지만, 하단 관로의 일부에서 신호가 직접 반사되어 수신되기 때문에 관로의 위치를 특정할 수 있다. 또한 관로의 음영영역과 가탐심도를 이용하여 각각의 반사 신호의 연관성을 분석할 수 있다.
본 연구에서는 지반의 노이즈를 제거하고 관로의 신호만 분석했기 때문에 실제 지반의 경우 다양한 노이즈와 불균질성에 대한 영향이 반영되지 않았다. 따라서 추후 연구로는 불균질성 및 노이즈가 있는 지반에서 신호 특성을 분석하고 그 결과를 분석하고자 한다.
