

1. 서 론
2. 이미지 분석 기법
2.1 이미지 분석 기법
2.2 훈련 절차와 분석
2.3 가진기 검증 시험
2.4 검증 시험 결과
3. 원심모형실험
3.1 실험조건
3.2 이미지 전처리 및 YOLO 인식 성능 평가
3.3 전처리 기법 및 측정 대상에 따른 정확도 평가
3.4 지진파에 따른 성능 비교
4. 결 론
1. 서 론
진동하는 구조물의 변위 측정 기법은 지속적으로 발전해왔으며, 기존의 접촉식 센서는 구조물에 직접 접촉해야 하므로 설치 공간에 제약이 있는 경우 적용이 어렵고, 동적 시스템의 경우 접촉센서로 인한 동적거동에 영향이 있을 수 있다. 이러한 한계를 극복하기 위해 비접촉식 센서가 활용되고 있다. 비접촉식 센서는 대상과 물리적으로 접촉하지 않고도 거리, 변위, 진동 등을 정밀하게 측정할 수 있어 구조물에 영향을 주지 않으며, 제한된 환경에서도 활용할 수 있는 장점이 있다. 특히 최근 고해상도 카메라 기술의 발전으로 비접촉식 이미지 분석 기법이 크게 향상되었으며, 지반공학 분야에서도 폭넓게 적용되고 있다. Wahyudi et al.(2012)은 이미지 분석을 사용하여 중공 원통형 비틀림 전단 시험에서 모래의 초기 상대 밀도 영향을 연구하였다. 이때 모래 공시체 외막의 표면에 검은 점을 부착하고 이를 전용소프트웨어(Move-tr/2D Ver. 7.21)를 사용하여 모래 공시체의 국부 변형을 관찰하였다. Jang et al.(2009)는 사질토의 변형 측정을 위해 2차원 모델실험에서 Particle image velocimetry(PIV)와 Digital image correlation(DIC) 기법을 적용하여 이미지 분석을 수행한 결과, 해상도와 분석 조건에 따라 측정 정확도가 최적화될 수 있음을 확인하였다. Kim et al.(2012)과 Choo et al.(2013)은 GeoPIV 패키지를 사용하여 맨드렐 관입으로 형성되는 모형점토 점토지반의 변형 및 파괴 메커니즘을 분석하였다. Kaddhour et al.(2013)은 X선 미세단층촬영법을 이용하여 모래의 함수특성과 국부 변형을 분석하였다. 3SR X선 스캐너를 3축 압축 장치에 적용하여 공극률과 포화도, 입자 변위 및 회전을 측정하였다. Kwak et al.(2016)는 정규압밀 점성토의 파괴거동을 분석하기 위해 평면변형률 시험을 수행하고, 시험 중 촬영된 이미지를 디지털 이미지 해석 기법으로 분석한 결과, 응력변형률 특성과 함께 시료 내부의 변형 분포 및 전단면 특성을 4단계로 평가하여 파괴 거동을 정량적으로 분석하였다. Yuan et al.(2017)은 두 대의 디지털 카메라로 촬영한 이미지를 사용하여 느슨한 모래에 설치된 말뚝의 횡하중 시 거동을 분석하기 위하여 축소 모형 시험을 수행하면서 두 대의 디지털카메라로 이미지를 촬영하였으며, PIVview2C Demo 소프트웨어를 사용하여 변위장을 계산하였다. Chavda et al.(2020)는 GeoPIV-RG를 사용하여 링 기초와 원형 개방 케이슨 아래의 모래에서 파괴 영역을 평가하기 위해 1g 모형 시험을 수행하였다.
전통적인 이미지 분석 기법은 다양한 계측과 실험에 활용되어 왔으나, 최근에는 딥러닝을 결합한 이미지 분석 기법이 빠르게 확산되고 있다. Liu et al.(2024)은 개선된 YOLOv7과 DeepSORT를 결합하여 비접촉식 대나무 구조물 변위 측정 기법을 제안하였으며, 대나무 압축 및 케이블 돔 실험을 통해 실시간 변위 추적에서 낮은 오차를 확인하였다. Jin et al.(2024)은 YOLO-RDS 알고리즘을 개발하여 스마트팜의 자동 모종 식재 시스템에서 기울기 상태를 회전 경계 상자와 각도 예측 헤드를 통해 실시간으로 모니터링하였으며, 예측 각도 오차는 0°에서 3° 사이로 나타났다. Sun et al.(2025)은 대형 유연 교량의 자세와 다 지점 진동 변위를 동시에 측정할 수 있는 알고리즘을 제안하고, 실험을 통해 높은 정확도를 입증하였다.
특히, 지반공학 분야에서도 딥러닝 기반 이미지 분석 기법이 활발히 적용되고 있다. Kim et al.(2018)은 콘크리트 구조물 균열 검사의 주관성을 해소하기 위해 딥러닝과 영상처리 기법을 접목한 자동 검출 및 특성 분석 방법을 개발하고, 약 1%의 오차로 실무 적용 가능성을 검증하였다. Bae et al.(2023) 딥러닝 기반 객체 탐지 알고리즘인 YOLO를 활용하여 터널 구조물의 GPR(Ground Penetrating Radar) 이미지에서 강지보재를 신속하고 정확하게 탐지하는 방법을 제안하였으며, 이를 통해 기존 수작업 기반 판독의 한계를 극복하고 자동화 가능성을 제시하였다. Song et al.(2024)은 옹벽 표면의 자연적 특징을 이용해 인공 표적 없이 변위를 측정할 수 있는 영상 기반 기법을 제안하였으며, 히스토그램 균등화와 토모그래피 알고리즘을 적용하여 옹벽의 수평 변위, 침하 및 표면 변위를 산정하고, 현장 적용 결과 최대 3.8mm 이내의 오차로 높은 정확도를 확보하였다. 그러나 동적 변위 측정에 대한 연구는 여전히 부족한 실정이다.
본 연구에서는 딥러닝 기반 이미지 분석 기법을 동적원심모형실험에서 계측되는 구조물의 진동 변위를 측정하는 데 적용하고자 하였다. 일차적으로 딥러닝 기반 오픈소스 객체 탐지 모델인 YOLOv5를 검증하기 위하여 진동 가진기 실험을 스마트폰으로 기록한 영상의 분석에 적용하였다. 최종적으로 모래지반 위에 설치된 단자유도 구조물의 동적원심모형실험에서 기록된 지진 시 단자유도 구조물의 영상을 분석하였다.
2. 이미지 분석 기법
2.1 딥러닝 기반 이미지 분석 기법
본 연구에서는 원심모형실험에서 기록된 동적 이미지를 분석하기 위해 객체 탐지 모델인 YOLO(You Only Look Once)를 활용하였다. YOLO는 단일 단계 탐지 방식의 실시간 객체 탐지 모델로, 이미지 내 객체의 위치와 분류를 동시에 수행한다(Redmon et al., 2016).
원심모형실험에서 구조물의 진동 변위를 측정하기 위해 YOLO모델을 적용한 절차는 Fig. 1과 같다. YOLO모델은 이미지에 수작업으로 라벨링한 물체의 정답(Ground truth)을 경계 상자(Bounding box)를 기반으로 학습한다. 이후 이미지에서 여러 개의 경계 상자를 예측 생성한다. YOLO의 합성곱신경망(Convolutional Neural Network; CNN)은 이미지 특징을 추출하고, 완전 연결 계층을 통해 각 경계 상자의 존재 확률과 위치 좌표를 예측한다.
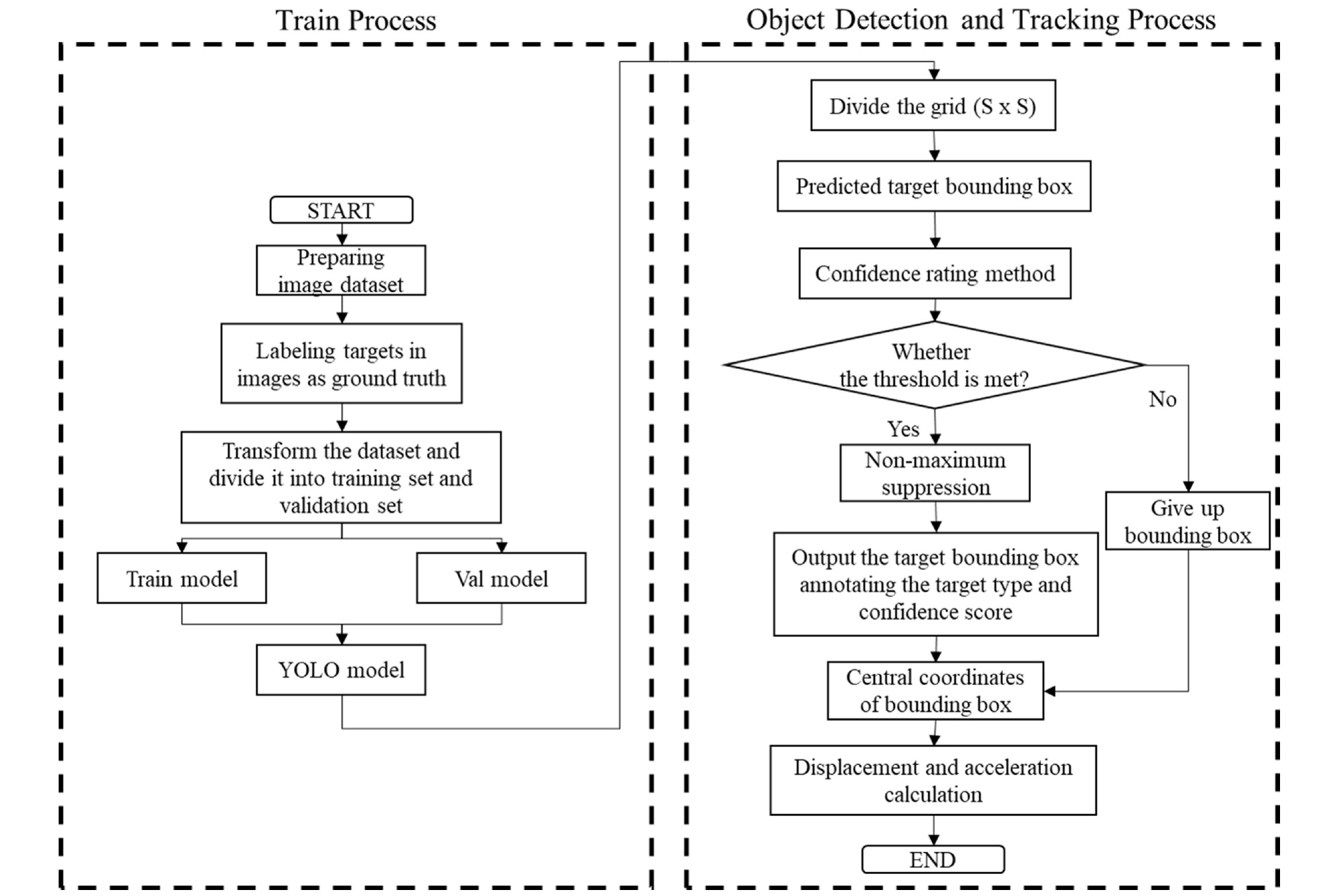
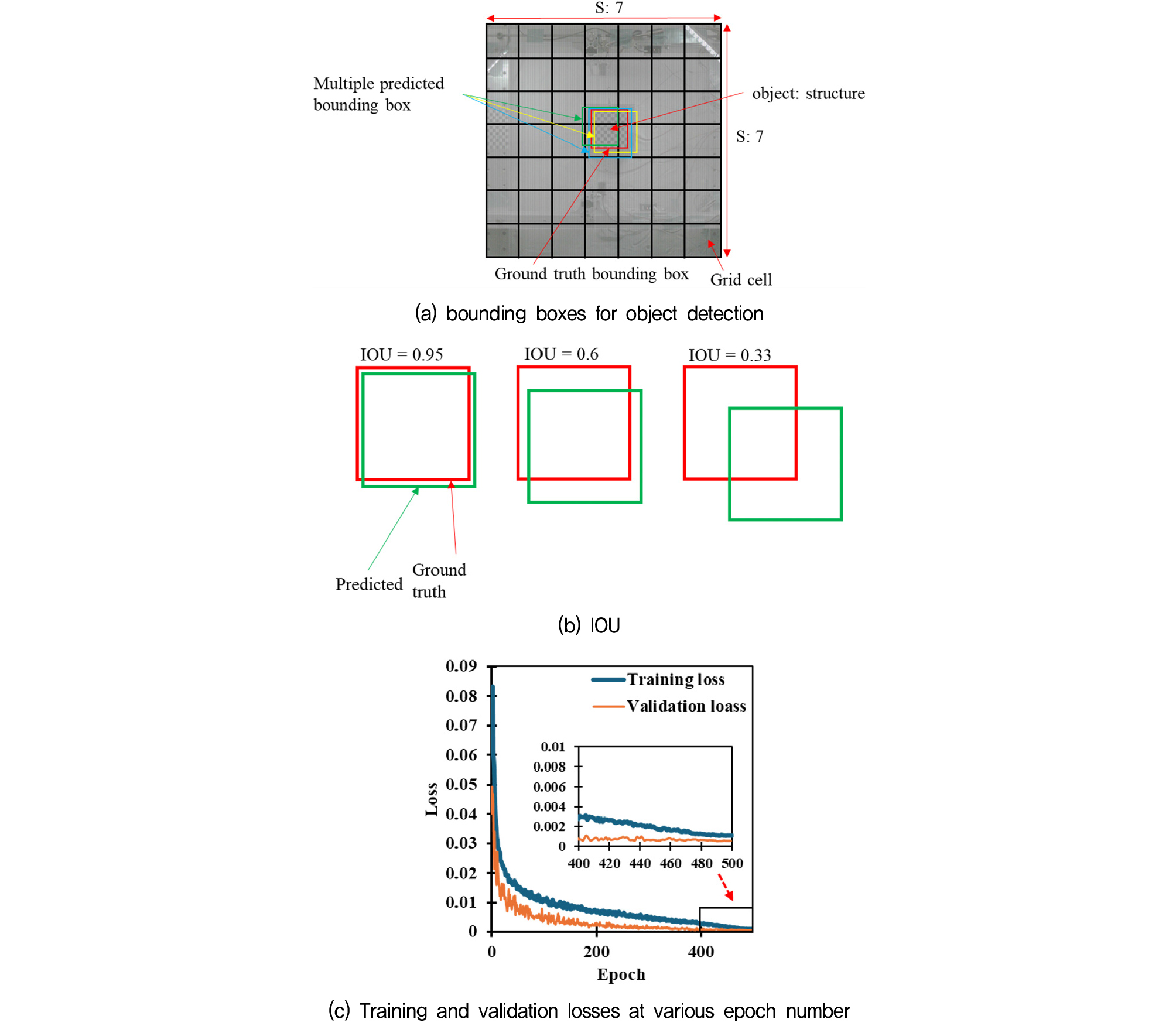
YOLO는 입력 이미지를 일정 크기의 그리드로 나눈 뒤, 물체가 속한 셀의 중심을 기준으로 탐지를 수행한다(Fig. 2a). 각 셀에 대해 신뢰도 점수(Confidence score)를 계산하는데, 이는 물체 존재 확률과 위치 정확도를 나타낸다. 신뢰도는 예측 경계 상자와 실제 경계 상자의 교집합 비율(Intersection over union; IOU)을 기반으로 계산되며, IOU 값이 1에 가까울수록 정확도가 높다(Fig. 2b).
Fig. 2c의 손실 그래프는 훈련 및 검증 손실 곡선을 나타낸다. 이 손실은 경계 상자의 정확한 좌표를 예측하는 box loss를 의미한다. 손실 값은 지속적으로 감소하였으며, 훈련 및 검증 손실은 약 480 epoch에서 수렴하였다. 검증 손실 곡선을 보면 과적합(overfitting)은 발생하지 않았다.
2.2 훈련 절차와 분석
YOLO의 학습은 에포크(Epoch)라는 단위로 데이터셋을 학습한다. 이때, 데이터셋은 배치(Batch)로 나누어 처리된다. 본 연구에서는 학습의 안정성과 효율성을 고려하여 에포크 수는 500회이고 배치 크기는 8로 설정하였다. 이미지 라벨링은 수작업 오차를 줄이기 위해 첫 프레임만 라벨링 후 복사하는 방식을 사용하였으며, 총 1000장의 이미지를 학습용(80%)과 검증용(20%)으로 나누어 활용하였다. 객체 검출 시에는 신뢰도 임계값 0.5를 적용하였다. YOLO모델의 학습과 테스트는 최대 32GB RAM, Intel(R) Xeon(R) CPU @ 2.30GHz, NVIDIA Tesla T4 GPU를 활용하는 클라우드 기반 플랫폼인 Google Colab에서 수행되었다.
2.3 가진기 검증 시험
YOLO 기반 이미지 분석의 타당성을 평가하기 위해, Fig. 3과 같이 진동가진기 시스템(K2007E01, The Modal Shop)을 갖춘 실험 환경을 구성하였다. 흑백 체크 패턴이 부착된 플라스틱 블록을 가진기 위에 설치하고, 블록 상단에는 가속도계(353B16, PCB Piezotronics)를 부착하였다. 가속도계 옆에는 레이저 변위 센서(IL-S025, Keyence)를 설치하여, 두 센서 모두 블록의 움직임을 정밀하게 추적할 수 있도록 하였다.
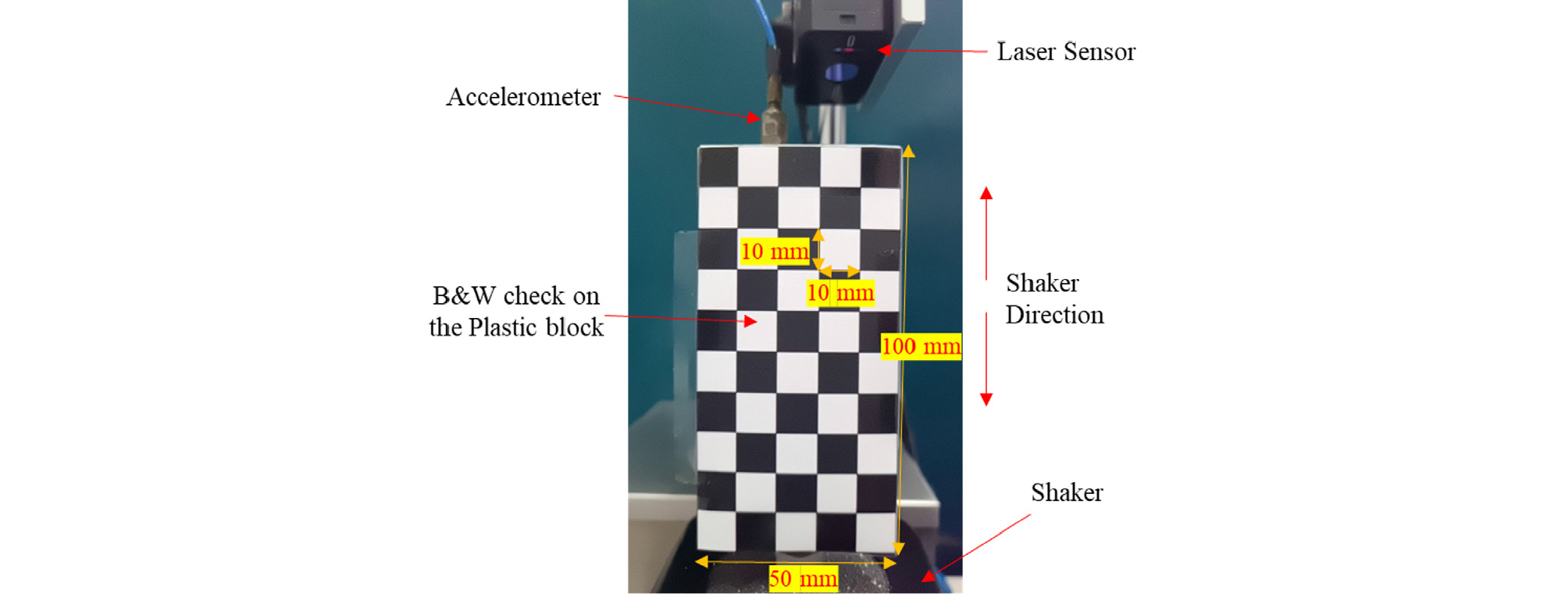
영상 촬영에는 Galaxy S21+ 스마트폰 카메라를 사용하였으며, 100mm 거리에서 960fps(=frame/sec)로 0.56초간 촬영하여 총 540장의 이미지를 수집하였다. 영상 해상도는 1280 × 1280픽셀로 기록되었다. 블록은 30Hz 주파수의 사인파로 총 10회 가진 되었다.
2.4 검증 시험 결과
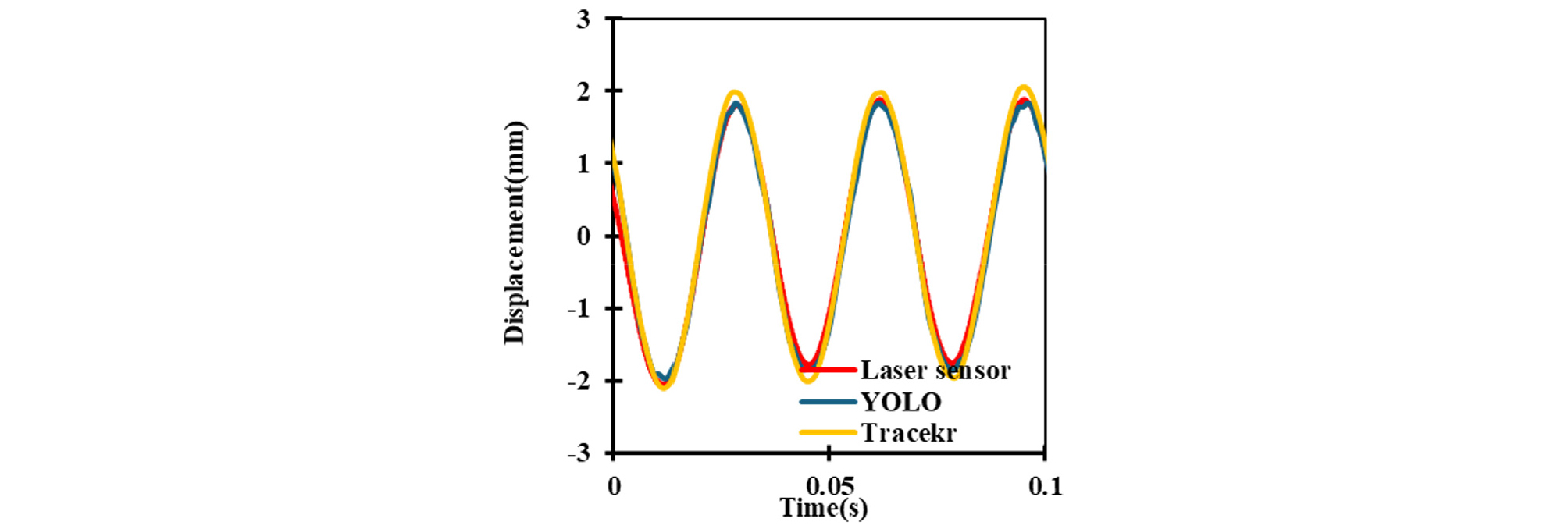
실험 결과, 이미지 분석으로 측정되는 10회 사이클의 양진폭 변위의 평균은 3.799mm, 가속도의 평균은 131.892m/s2로 측정되었다. 레이저 센서와 비교한 변위의 오차율은 최대 3.796%, 가속도계와 비교한 가속도의 오차율은 최대 1.560%로 계산되었으며, 이는 해당 측정 방법의 높은 정확성과 신뢰성을 나타낸다. 변위 데이터를 기반으로 계산한 결정계수(R2)는 0.9895, 평균제곱오차(MSE)는 0.00336, 평균제곱근오차(RMSE)는 0.183으로, 모델의 비교적 높은 안정성과 정확도를 확인하였다.
YOLO 분석기법 검증을 위해 Tracker 소프트웨어 결과를 비교하였다. 동일 데이터를 Tracker로 추적하여 10회 사인파 양진폭 변위의 평균한 값을 레이저 변위 측정값과 비교한 결과, 오차율은 11.808%로 나타났으며 이는 YOLO 기반 모델에 비해 높은 오차를 보였다(Fig. 4). 이는 수동 또는 반자동 방식으로 사용자가 대상물의 초기 위치를 설정하면, 주변의 화상정보(RGB 정보)을 이후 프레임과의 비교를 통해서 추적해 이동 경로를 계산하는 Tracker 알고리즘의 영향을 받아 배경의 유사성이 큰 본 실험에서 오차가 증가한 것으로 판단된다. 이에 따라 본 연구에서는 YOLO를 활용한 변위 측정 방법이 보다 우수한 정확도를 가지는 것으로 판단하여, 이후 원심모형실험에 본 방법을 적용하였다.
3. 원심모형실험
3.1 실험조건
60g 원심 가속도 조건에서 수행된 동적원심모형실험에서 기록된 고속 카메라 영상 분석에 YOLO모델을 적용하였다. 실험은 상대 밀도 80%의 건조 모래로 조성된 지반에 매설된 지하 구조물과 단일 자유도(SDoF) 구조물을 대상으로 수행하였다(Fig. 5a). 실험 상세는 Falcon(2024)을 참고한다. 동적원심모형실험에서는 영구변형이 거의 발생하지 않는 중규모 이하의 지진만을 대상으로 분석하였기 때문에, 본 연구에서는 영구변형이 미미한 것으로 가정하였다.
SDoF 구조물의 최상단 질량 움직임을 고속 카메라(Phantom v5.1)를 이용해 촬영하였다. 고속카메라는 진동대 상단으로부터 1607mm 떨어진 위치에 설치되었으며, 카메라는 초당 1,024프레임으로 영상 해상도 1024×1024 픽셀로 기록하였다. 진동대는 진동을 상쇄할 수 있는 카운터벨런시 기능을 탑재하고 있어, 카메라로 전달되는 진동이 미미하다고 가정하였다(Lee et al., 2010). 인식 정확도를 높이기 위해 구조물의 표면에는 110mm × 110mm 크기의 흑백 패턴을 부착하였다(Fig. 5b). 실험에는 Northridge, Kobe, Artificial, Chuetsu의 4종 지진파가 적용되었고, 이에 따라 총 5,109장의 이미지가 수집되었다.
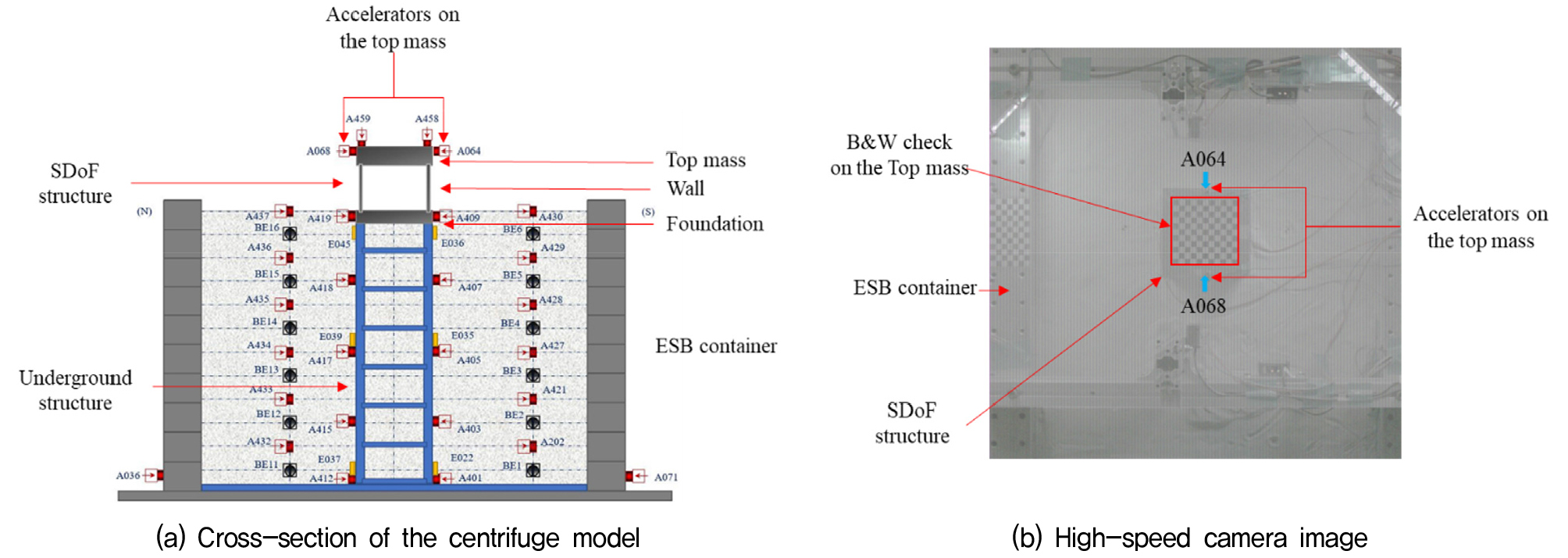
지반 및 구조물에는 가속도계를 설치하여 각 구성요 소의 가속도를 측정하였으며, 본 연구에서는 상부 질량에 부착된 두 개의 가속도계(A068, A064) 데이터를 활 용해 영상 분석 결과와 비교하였다.
3.2 이미지 전처리 및 YOLO 인식 성능 평가
이미지 분석 과정에서 해상도가 낮거나 품질이 저하된 영상은 경계가 흐릿해 물체 인식 오류를 유발할 수 있다. 특히 원심모형실험의 경우 카메라로부터 피사체인 구조물까지의 거리가 멀어 영상 화질 저하가 두드러졌고, 이에 대한 개선이 필요하다.
이를 해결하기 위해, 원본 이미지에서 물체 중심을 기준으로 240 × 240 픽셀 크기의 부분 영역을 추출한 뒤, 원본 해상도(1024 × 1024 픽셀)로 확대하였다. 이때 단 순 확대 기법 외에도 경계 인식 문제를 보완하기 위해 대 비 향상 기법인 RSWHE-M(Case 2, Case 5)과 딥러닝 기 반의 Deep Image Enhancement(DIE) 기법(Case 3, Case 6)을 적용하였으며, 이를 이미지 향상기법이 적용되지 않은 방법(Case 1, Case 3)과 비교·분석하였다.
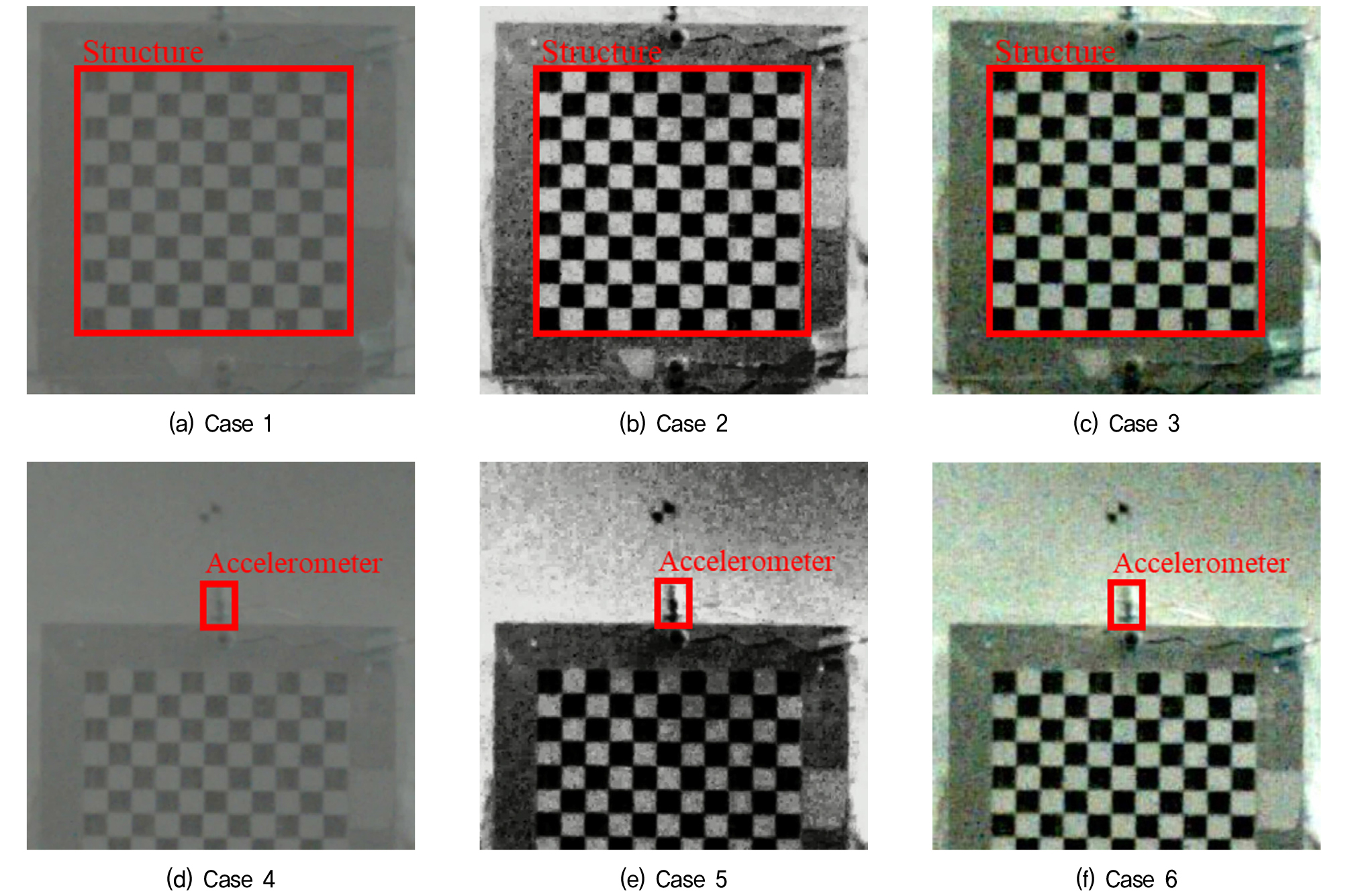
Table 1.
Table 1. Information on videos analyzed in this study
RSWHE-M은 밝기를 유지하면서 대비를 효과적으로 높이는 히스토그램 평활화 기반 기법으로, 영상 품질 향상에 널리 사용된다(Kim and Chung, 2008). 반면 DIE는 다중 스케일 특징 추출과 어텐션 메커니즘(attention)을 활용해 이미지의 구조와 디테일을 모두 고려하며, 세부 질감 복원과 명암 대비 향상에서 우수한 성능을 보인다(Ye et al., 2024).
물체 인식 방식은 구조물에 부착된 문양을 추적하는 방법(Case 1 ~ Case 3)과 가속도계 센서 이미지를 추적하는 방법(Case 4 ~ Case 6)을 각각 수행하여 비교하였다. Northridge 지진파 데이터를 이용해 두 방법의 정확도를 비교하였다. 이후, 각 지진파에 대해 더 정확한 방법을 적용하여 분석을 수행하였다.
모델 성능 평가는 결정계수(R2), 오차율(%), 평균제곱오차(MSE), 평균제곱근오차(RMSE)을 사용하였다.
여기서, 는 실제값, 는 예측값, 은 실제값의 평균이다.
3.3 전처리 기법 및 측정 대상에 따른 정확도 평가
본 연구에서는 이미지 전처리를 적용한 후, YOLO로 추적하는 대상에 따라 문양을 직접 추적하는 방법(Case 1 ~ Case 3)과 문양 위에 부착된 가속도계를 추적하는 방법(Case 4 ~ Case 6)으로 구분하였다. 분석 결과는 Fig. 7과 같다.
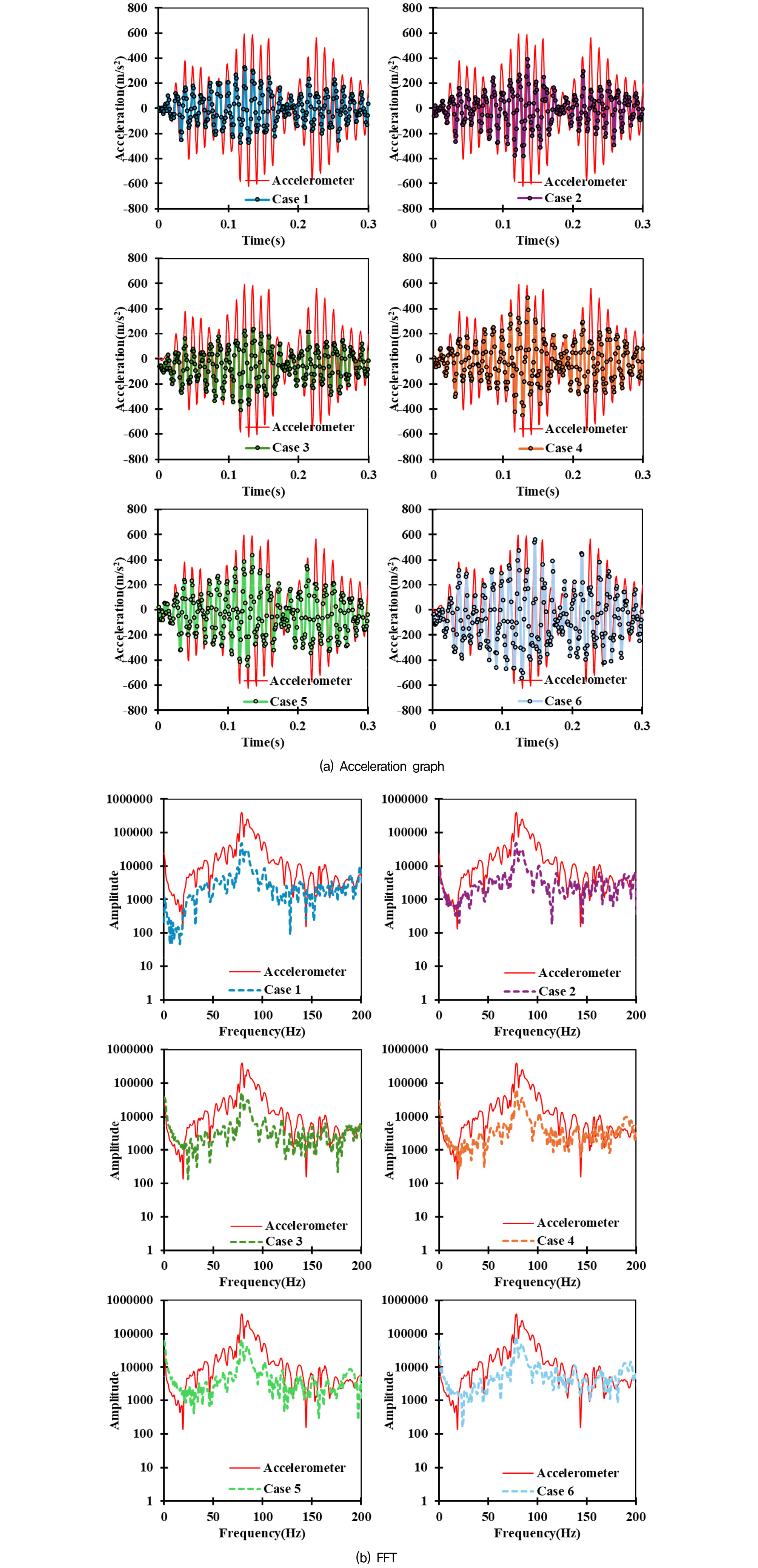
전반적으로 YOLO분석결과는 가속도계 측정값보다 낮은 가속도를 기록하였다. 이는 Fig. 7의 결과에서 확인할 수 있듯이 0.1초 사이에 7개 이상의 파장이 기록되어, 1파장당 14개 내외의 측정점만 확보되었기 때문에 샘플링 속도(sample rate)가 충분하지 않았던 것으로 판단된다.
문양을 직접적으로 추적하는 방법(Case 1 ~ Case3)이 문양 위에 부착된 가속도계 이미지를 직접 추적하는 방법(Case 4 ~ Case 6)에 비해 10% 이상의 오차율을 보였다(Table 2). 이때, Case 1의 오차율이 49%로 가장 컸으며 Case 6이 7.069%으로 가장 작은 오차율을 나타냈다. 전처리를 하지 않은 Case 1에 비해 전처리를 진행한 Case 2와 Case 3는 오차율이 감소하였다. 하지만 추적 대상만 달라지는 Case 4와 Case 5는 오히려 오차율이 증가하는 결과를 보였다. 이는 대비를 향상시키는 방법이 이미지 상의 큰 물체인 문양을 측정하는 데는 효과적이지만 가속도계와 같은 작은 물체를 탐지하는데 불리하다는 것을 의미한다. 변위 오차율을 비교한 결과, 문양을 직접 추적하는 방법 (Case 1 ~ Case3)은 가속도계를 측정하는 방법 (Case 4~ Case 6)에 비해 오차율이 감소하는 경향을 보였다. 반면, 문양 위에 부착된 가속도계 이미지를 직접 추적하는 방법은 오차율이 증가하였다. 그럼에도 불구하고, 여전히 문양을 직접 추적하는 방법보다는 낮은 수준의 오차율을 보였다.
Table 2.
Image preprocessing for analysis
결정계수의 값은 문양을 직접 추적하는 방법(Case 1 ~ Case3)이 문양 위에 부착된 가속도계를 추적하는 방법(Case 4 ~ Case 6)에 비해 높은 값을 나타냈다. 이때 Case 6이 0.6186으로 가장 낮은 값이 나타났다. 이는 이미지 향상과 동시에 많은 노이즈 역시 포함하였기 때문이다. 문양을 추적하는 방법(Case 1 ~ Case 3)의 MSE의 평균은 0.2354이며, RMSE의 평균은 0.484이다. 문양 위에 부착된 가속도계를 추적하는 방법(Case 4 ~ Case 6)은 MSE의 평균은 0.0935, RMSE의 평균은 0.304으로 가속도계를 측정하는 방법에서 MSE와 RMSE 모두 감소하였다. 하지만 문양을 추적하는 방법의 값 역시 작은 값이므로 YOLO를 이용한 모델이 비교적 안정적으로 훈련되었음을 의미한다.
고속푸리에변환(FFT) 방법을 사용하여 각 방법에 따른 주파수 응답곡선을 분석하였다. 모든 방법에서 동일한 78.964Hz의 공진 주파수가 나타났다. 이때 가속도계의 공진 주파수는 79.046Hz로 유사하였다. 진폭을 비교하였을 때 가속도계의 진폭은 393,041으로 높았으나 YOLO를 통한 측정결과는 상대적으로 낮은 결과값을 보였다. 이러한 결과는 구조물과 카메라 사이의 상당한 거리로 인한 이미지 품질 저하 문제 때문으로 판단된다.
Case 6의 결정계수는 낮지만, MSE(0.0801) 및 RMSE(0.283) 값이 낮게 나타나서, 정량 오차가 가장 작다고 판단하였다. 따라서 Case 6을 가장 적합한 방법으로 판단하고, 이를 이후 지진파 측정에 적용하였다.
3.4 지진파에 따른 성능 비교
입력 지진파에 따른 결과는 Fig. 8에 제시되어 있다. 지진파별 오차율은 대체로 7%에서 16% 사이의 값을 보였다(Table 3). 이 중 Case 8과 Case 9에서 오차율이 증가하였는데, 이는 Case 7에 비해 더 많은 노이즈가 학습되어 중심점의 위치가 변화하고, 그로 인해 변위를 정확히 측정하지 못한 것으로 해석된다. 결정계수(R2)를 비교했을 때도 Case 7보다 약 0.1 감소한 수치를 나타냈다.
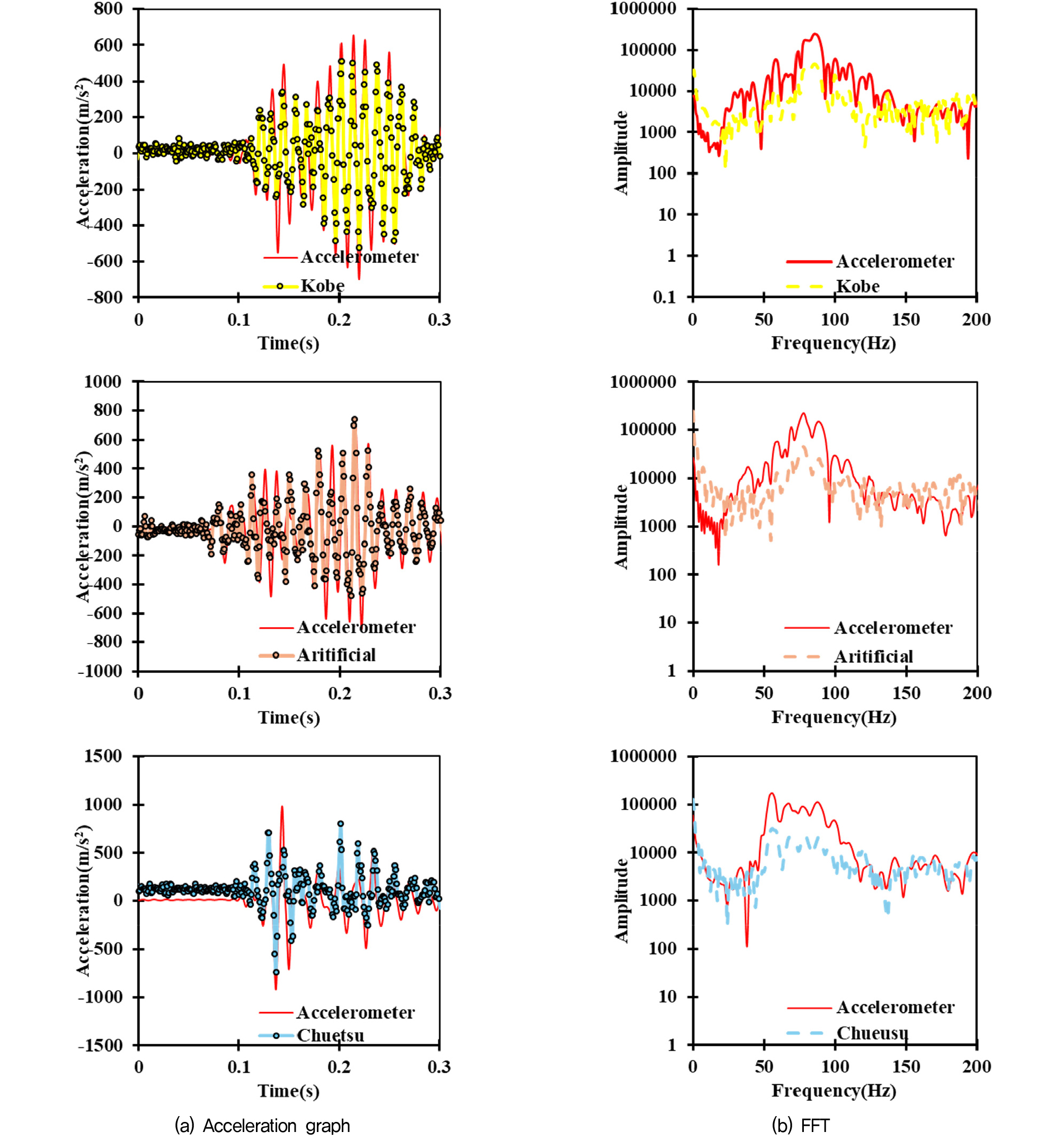
Table 3.
Seismic waves for analysis
Case 9의 MSE는 0.3941, RMSE는 0.628로, 이는 Case 7과 Case 8보다 높은 수치이며, Case 9의 가속도 값이 증가함에 따라 증가한 것으로 판단된다. 그럼에도 불구하고 절대적인 오차 수치는 여전히 낮은 수준으로, 모델이 안정적으로 훈련되었음을 의미한다.
고속 푸리에 변환(FFT) 분석 결과, 진폭에서는 차이가 있었지만 모든 지진파의 피크 주파수는 1Hz 미만의 편차를 보여 전반적으로 일관된 주파수 특성을 확인할 수 있었다. 이로 인해 YOLO 기반 딥러닝 이미지 분석 기법은 진동 변위 측정에 충분히 적용 가능하다고 판단된다.
4. 결 론
본 연구에서는 YOLO를 활용한 딥러닝 기반 이미지 분석 기법을 통해 진동하는 물체의 동적 측정이 가능한지를 검토하였다. 주요 결과는 다음과 같다.
(1) 원심모형실험에 앞서 진동 가진기 검증실험을 수행하여 YOLO 기반 분석 기법의 적용 가능성을 확인하였다. 분석 결과, 결정계수(R2)는 0.9895로 높은 상관성을 보였으며, MSE는 0.00336, RMSE는 0.183로 모델의 비교적 높은 안정성을 확인할 수 있었다. 변위 측정 오차율은 3.796%, 가속도는 1.560%로 낮은 수준이었으며, Tracker 프로그램 결과와 비교 시 약 8% 더 낮은 오차율을 보였다.
(2) 측정 정확도 향상을 위해 Northridge 지진파 영상을 대상으로 전처리를 수행하였다. 특히, 가속도계 이미지를 직접 측정하고 Deep Image Enhancement(DIE) 기법을 적용한 경우 가속도오차율이 7.069%로 가장 낮았다. 공진 주파수는 78.964Hz에서 79.046Hz로 일관되게 나타났다. 다만, 결정계수는 낮은 값을 보여 이미지 향상 과정에서 노이지가 함께 포함된 영향으로 판단된다.
(3) 다른 지진파로 촬영된 영상에도 YOLO를 적용한 결과, 평균 약 10%의 오차율이 나타났으며, 공진 주파수는 가속도계 측정값과 1Hz 미만의 차이를 보였다. 그러나 영상에 노이즈가 포함될 경우 오차율이 10% 이상으로 증가하고 결정계수 등의 신뢰성 지표도 저하되었다.
결론적으로, YOLO 기반 딥러닝 영상 분석 기법은 진동 변위 측정에 효과적으로 적용 가능하며, 전처리 기법을 통해 정확도 향상이 가능함을 확인하였다. 다만, 이미지 노이즈에 대한 보정 및 각 주기에 대한 샘플링 속도를 제공할 수 있는 추가 연구가 필요하다.
