

1. 서 론
2. 시스템 구성
2.1 시스템 개요
2.2 가속도 및 자이로 센서에 의한 기울기 계산
3. 데이터 필터링
3.1 가속도 및 자이로 센서의 데이터 특성
3.2 이동평균(MA)
3.3 지수 가중 이동평균(EWMA)
3.4 상보필터(Complementary Filter)
3.5 칼만필터(Kalman Filter)
3.6 필터링 방법 적용 결과
4. 정확도 검증 시험
4.1 검증 시험 방법
4.2 검증 결과
5. 결 론
1. 서 론
옹벽 시설물의 노후화는 균열, 박리, 단면 변형과 같은 구조적 노후화와 탄산화, 습윤 환경에 따른 재료적 노후화로 나눌 수 있으며, 옹벽의 안정성을 저하시키는 주요 원인으로 작용한다(KISTEC, 2012). 이러한 노후화는 일반적으로 사용 연수가 10년을 지나면서 진행되기 시작하여, 20년이 경과하면 그 정도가 심화된다(Choi, 2019). Table 1은 2022년과 2023년 기준 국내 옹벽 시설물의 사용 연수 현황을 나타낸다. 전체 옹벽 중 절반 이상이 사용 연수 10년 이상이며, 사용 연수 20년 이상의 노후 옹벽 또한 빠른 속도로 증가하고 있다. 이에 따른 내력 손실 등의 중대 결함 건수도 2017년 1건, 2018년 1건, 2019년 3건, 2020년 6건, 2021년 12건으로 매년 증가 추세를 보이고 있어(KALIS, 2024), 옹벽 시설물의 안전 진단 및 유지관리에 대한 중요성이 강조되고 있다.
Table 1.
Status of retaining wall usage years (KALIS, 2023; KALIS, 2024)
옹벽의 안전 진단에서 고려되는 평가 요소 중 한 가지는 수평 변위량이다. Table 2는 해외 주요 문헌에서 제시한 수평 변위 기준을 나타낸 것이며, 국내에서는 일반적으로 옹벽의 전도에 대한 허용 수평 변위를 옹벽 높이(H)의 3%인 0.03H로 정의하고 있다(Kim et al., 2004). 이러한 옹벽의 수평 변위는 건물 경사계, 경사계, 변형률계, 신축계와 같은 다양한 측정 장비를 통해 계측할 수 있으나, 기존의 장비들은 고가의 비용으로 인해 소규모현장에서 적용이 어렵다는 문제가 있다(Han et al., 2007).
Table 2.
Allowable horizontal displacement (Sim, 2012)
| Source | Allowable displacement |
| FHWA (2001) |
Extensibility : (1.67%)H Inextensibility : (0.62%)H |
| BS8006 (1995) | (0.44%)H |
| Bjerrum (1963) | (1/300)H |
이에, 기존 고가의 계측 장비에 대한 대안으로 저비용 오픈소스 하드웨어를 활용한 계측 시스템을 고려할 수 있다. Shin et al.(2019)은 라즈베리 파이와 가속도계를 활용하여 구조물의 응답을 실시간으로 측정할 수 있는 엣지 컴퓨팅 시스템을 개발하였고, Kim(2019)은 영상처리기법과 아두이노를 적용하여 콘크리트 구조물의 균열 폭을 신뢰성 있게 측정할 수 있는 시스템을 제안하였다. 또한, Sohn(2021)은 아두이노와 라즈베리 파이를 활용하여 구조물의 진동을 측정하는 고속 구조 진동 측정 시스템을 개발하였다. 옹벽 등 지반시설물의 벽체 기울기 및 수평 변위는 시설물의 안전 점검과 유지관리 시 주요 고려 대상이나, 저비용 오픈소스 하드웨어를 기반으로 한 벽체 기울기 계측 시스템에 대한 연구는 부족한 상황이다. 따라서 본 연구에서는 저비용 오픈소스 하드웨어인 아두이노(Arduino, 2024)를 활용한 벽체 기울기 측정 시스템을 제안함으로써 기존 계측기기에 대한 경제적인 대안을 제시하고자 한다.
2. 시스템 구성
2.1 시스템 개요
본 연구에서 개발한 벽체 기울기 측정 시스템은 Fig. 1의 아두이노 보드(Arduino Nano 33 IoT)를 기반으로 하며, 내장된 LSM6DS3 센서를 통해 측정을 수행한다. LSM6DS3는 3축 가속도 센서(Accelerometer)와 3축 자이로 센서(Gyro sensor)를 통합한 6축 IMU(Inertial Measurement Unit) 센서로, ()축 방향의 가속도와 각속도를 측정할 수 있다(STMicroelectronics, 2024). 그러나 기울기 값을 측정하는 기능은 내장되어 있지 않으므로, 측정값에 변환식을 적용하는 과정이 필요하다.

2.2 가속도 및 자이로 센서에 의한 기울기 계산
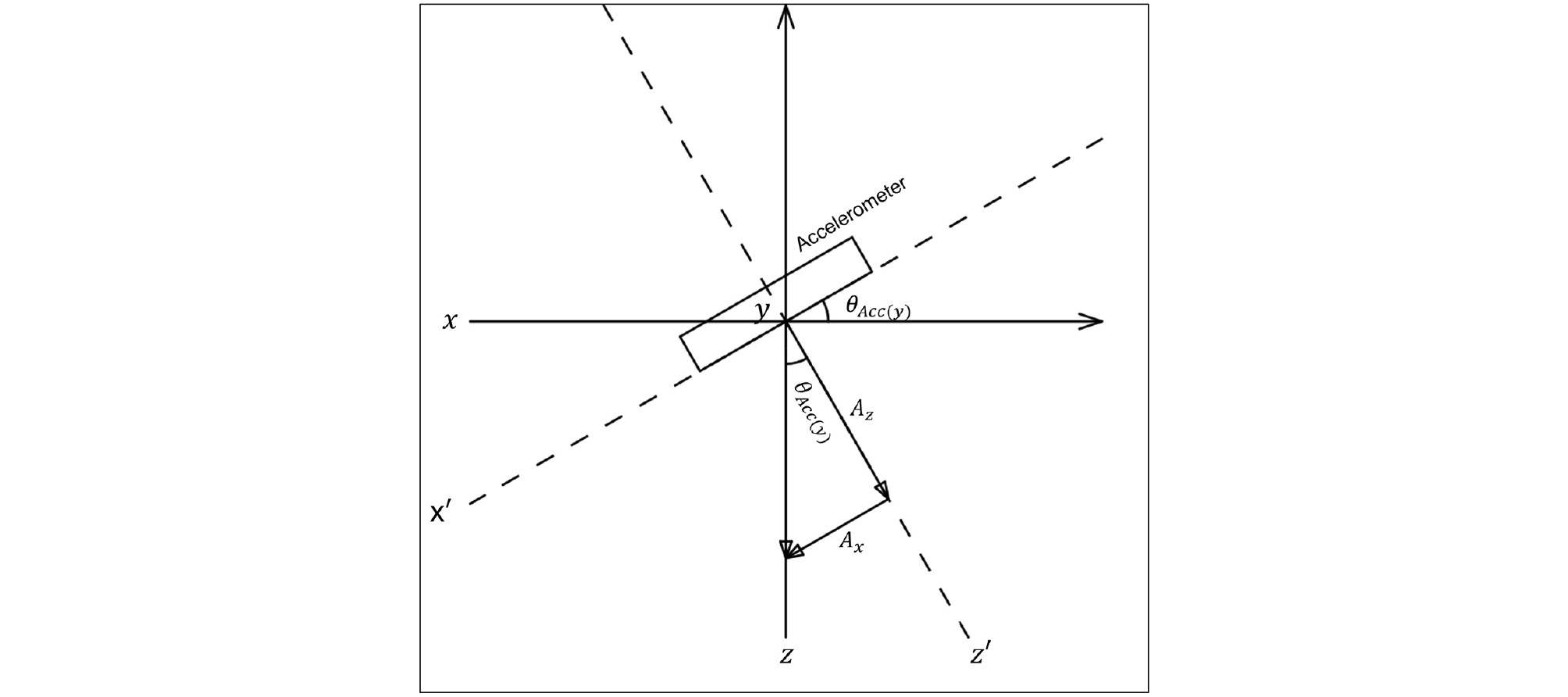
정지 상태에서 가속도 센서의 측정값은, 기준 축에 대한 중력 가속도()의 벡터 성분이다(Amasay et al., 2009). Fig. 2에 보인 것처럼, 평면에서 와 는 각각 축과 축 방향의 가속도 성분이며, 축을 중심으로 한 기울기인 는 식 (1)과 같이 정의할 수 있다. 본 식에서, 함수는 계산된 값의 범위가 로 제한되므로, 의 범위 값을 계산할 수 있는 함수를 사용하였다(Moritsugu and Matsumoto, 1989).
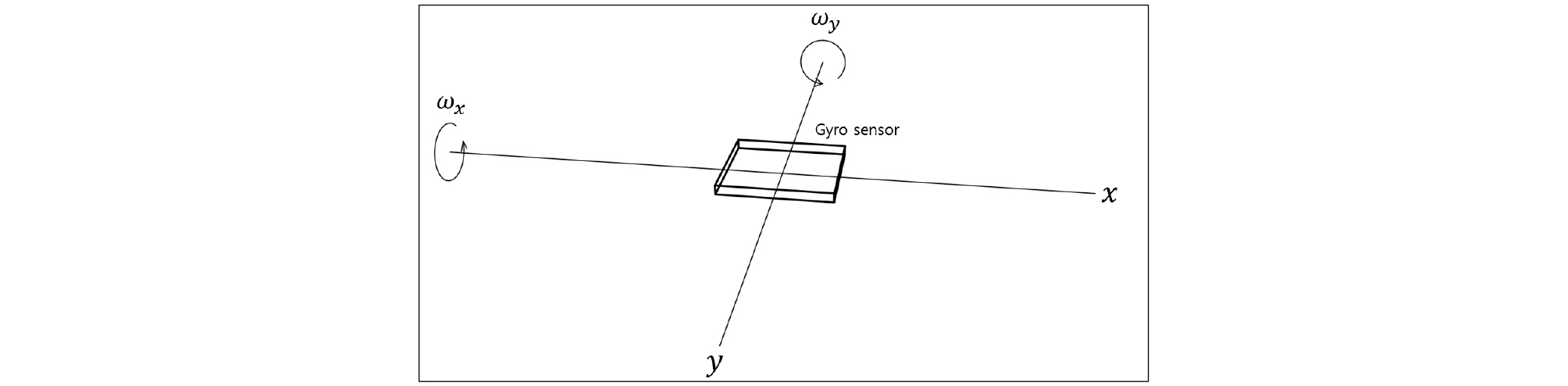
자이로 센서는 Fig. 3과 같이, 축 방향의 회전속도인 각속도()를 측정한다. 측정된 각속도()를 식 (2)와 같이 시간()에 대해서 적분하고, 이전 각도 를 더하면, 축 방향의 기울기인 를 얻을 수 있다.
3. 데이터 필터링
3.1 가속도 및 자이로 센서의 데이터 특성
가속도 센서와 자이로 센서는 노이즈로 인해 측정값에 오차가 발생할 수 있다. 이러한 노이즈는 측정값의 신뢰성을 저하시킬 뿐만 아니라, 필터 설계 및 시스템 개선에도 중요한 요소로 작용한다. 따라서 각 센서의 노이즈 특성을 파악하기 위해 정지 상태에서 수평면(0°)의 축 방향 기울기를 측정하고 결과를 분석하였다.
Fig. 4는 가속도 센서를 통해 측정한 축 기울기 값 의 변동을 나타낸다. 가속도 센서는 고주파 성분의 노이즈로 인해 단기적인 정확도는 낮았으나, 오차의 누적이 없어 장기적인 정확도는 높은 것으로 확인되었다(Lee, 2017). 이러한 노이즈는 저역 통과 필터(LPF)를 적용하여 감쇄할 수 있으며, 아두이노 기반의 벽체 기울기 측정 시스템에서는 이를 디지털 필터를 통해 구현할 수 있다. 대표적인 저역 통과 필터링 기법으로는 이동평균(MA)과 지수 가중 이동평균(EWMA)이 있다.
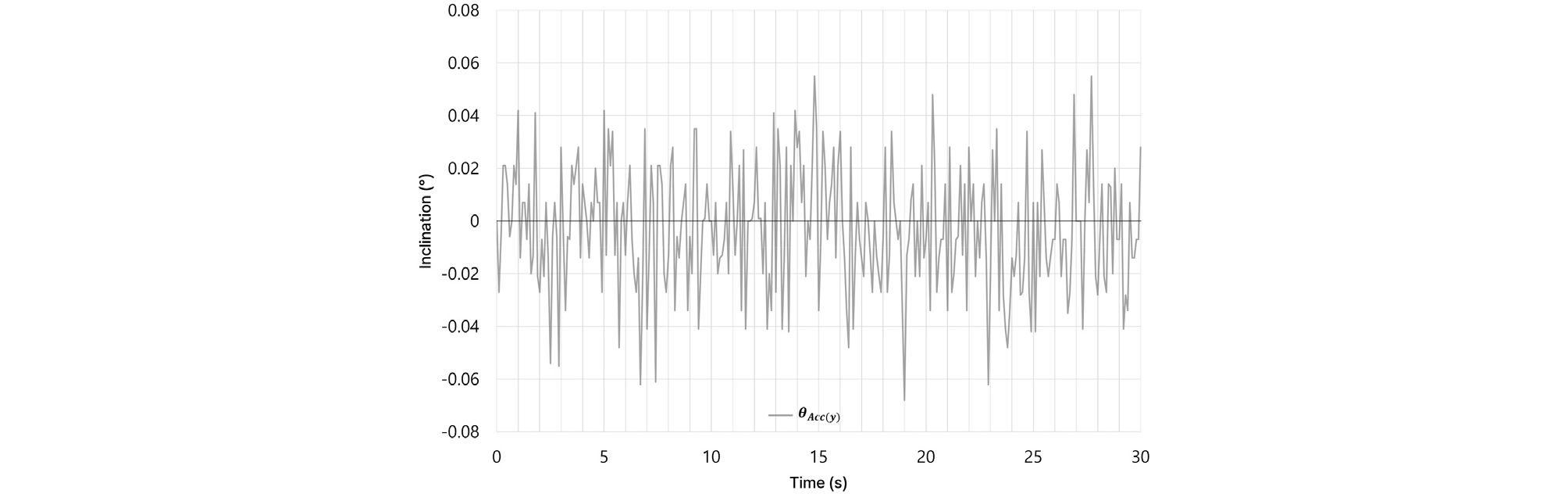
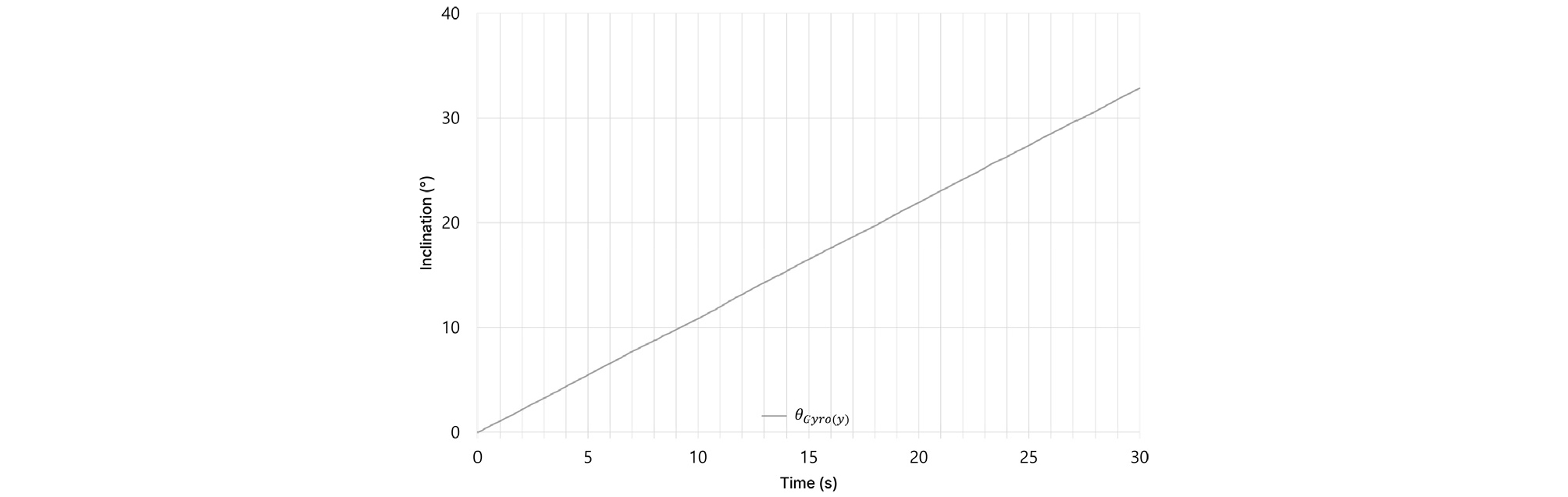
Fig. 5는 자이로 센서를 통해 측정한 축 방향 기울기 값 의 변동을 나타낸다. 자이로 센서는 단기적인 정확도가 우수하지만, 적분 과정에서 누적되는 드리프트 현상으로 인해 장기적인 정확도가 저하되는 문제가 있다(Lee, 2017). 이러한 드리프트 오차는 저주파 성분의 오차로 볼 수 있기 때문에, 고역 통과 필터(HPF)를 통해 감쇄할 수 있다. 한편, 자이로 센서는 중력에 기반한 절대적인 영점을 제공하지 못하는 문제가 있다. 따라서 자이로 센서는 단독으로 기울기 측정에 사용되기보다 가속도 센서와 융합하여 사용하는 경우(센서 융합)가 일반적이다. 가속도 센서는 중력을 기준으로 기울기를 측정해 절대적인 영점을 제공하며, 자이로 센서의 드리프트 현상을 보완할 수 있다. 대표적인 센서 융합 기법으로는, 상보필터와 칼만필터가 있다.
본 연구에서는 이동평균, 지수 가중 이동평균(EWMA), 상보필터, 칼만필터를 통해 측정값을 보정한다. 특히, 칼만필터는 연산량이 비교적 적은 선형 칼만필터(LKF)를 사용하였다.
3.2 이동평균(MA)
이동평균은 식 (3)과 같이, 시계열 데이터에서 현재 데이터 를 기준으로 개의 샘플을 선택하여 평균을 산출하는 기법이다. 구조가 단순하여 연산 속도가 빠르고, 고주파 잡음의 제거 및 간헐적인 동잡음의 제거에 유용하나(Lee, 2012), 의 값이 커짐에 따라 신호가 과도하게 평활화되면 신호의 세부적인 변동이 손실될 우려가 있다.
그러나 벽체 구조물의 거동이 상대적으로 정적인 특성을 가지며, 갑작스러운 변동의 영향이 크지 않다는 점을 고려하여 을 적용하였다. Fig. 6은 가속도 센서로부터 측정된 와 에 이동평균(MA)을 적용하여 얻은 와 를 통해 최종 기울기를 계산하는 과정을 보여준다.

3.3 지수 가중 이동평균(EWMA)
EWMA는 식 (4)로 정의되며 는 현재의 측정값, 는 필터링된 값이다. 이동평균과 달리 최근의 측정값에 가중치 를 부여하여 변화에 빠르게 대응할 수 있다. 따라서, EWMA는 이동평균보다 부드러운 신호를 출력하며(Everett, 2011), 데이터의 평활화에 유리하다. 여기서, 가중치 는 0과 1 사이의 값을 가지는 상수로, 값이 클수록 최근의 값에 빠르게 반응하여 민감도가 높아진다. 기존의 연구에 따르면, 일 때 가장 정확한 결과를 보였으며(Hunter, 1986), 이를 근거로 을 적용하였다.
Fig. 7은 가속도 센서로부터 측정된 와 에 EWMA를 적용하여 얻은 와 을 통해 최종 기울기를 계산하는 과정을 보여준다.

3.4 상보필터(Complementary Filter)
가속도 센서는 장기적 정확도에서, 자이로 센서는 단기적 정확도에서 강점을 보인다. 상보필터는 이러한 두 센서의 데이터를 결합하여 각각의 장점을 동시에 실현할 수 있는 기법으로, 구조가 간단하고 저가의 컴퓨터에서도 쉽게 구현할 수 있다(Jung et al., 2015). 상보필터는 식 (5)와 같이 정의되며, 는 가속도 센서와 자이로 센서의 반영 비율을 조정하는 매개변수이다. 이때, 가속도 센서에는 저역 통과 필터(LPF), 자이로 센서에는 고역 통과 필터(HPF)가 적용된다.
기존의 연구에 따르면, IMU 센서에 상보필터를 적용했을 때 에서 가장 높은 정확도를 보이는 것으로 확인되었다(Maulana et al., 2018). 이를 근거로 하여 본 연구에서도 동일한 값을 적용하였으며, Fig. 8은 상보필터에 의해 기울기를 계산하는 과정을 보여준다.

3.5 칼만필터(Kalman Filter)
칼만필터는 Fig. 9와 같이 시스템 모델을 기반으로, 예측값()과 측정값()를 칼만 이득()을 통해 결합하여 최적의 추정값()을 계산하는 알고리즘이다. 이 과정에서 오차 공분산()도 갱신되며, 점진적으로 오차 공분산이 감소함에 따라 추정값의 신뢰도가 증가한다.
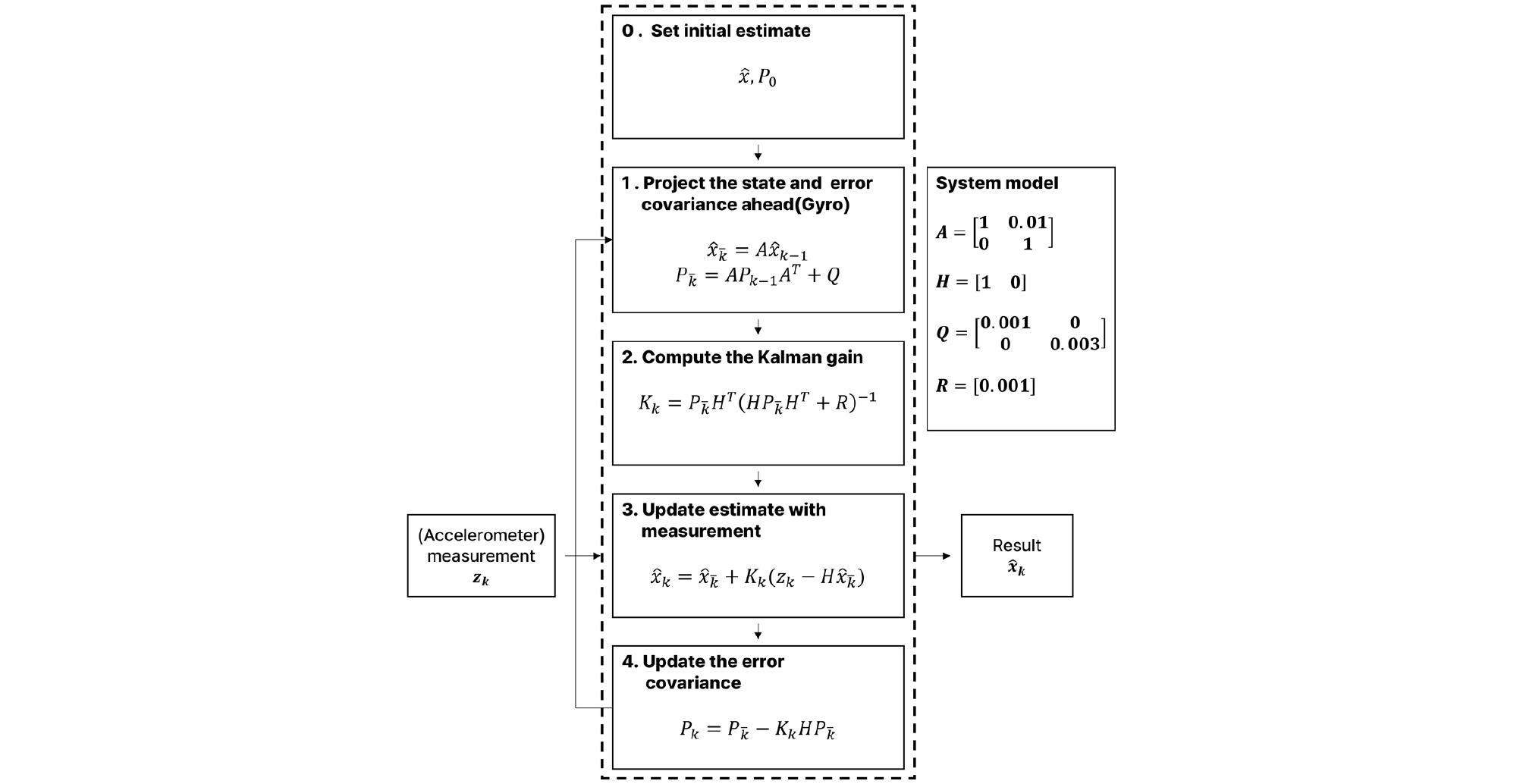
시스템 모델이란, 시스템의 특성을 수학적으로 모델링 한 것으로 시스템 행렬 , 출력 행렬 , 시스템 잡음 공분산 행렬 , 측정 잡음 공분산 행렬 로 구성된다(Kim, 2019). 시스템 행렬 는 시간에 따른 시스템의 변동을 나타낸다. 본 시스템에 적용된 칼만필터에서 예측은 자이로 센서에 의해 수행되는데, 측정 간격()는 0.01초이다. 따라서, 시스템 행렬에 의해 0.01초마다 예측값이 갱신된다. 출력 행렬 는 측정값과 상태 변수의 관계를 나타낸다. 시스템 잡음 공분산 행렬 는 자이로 센서의 예측 과정에서 발생할 수 있는 불확실성을 수학적으로 모델링한 2x2 대각행렬이다. 이 행렬에서 불확실성을 나타내는 성분은 과 로, 각각 드리프트 현상에 대한 분산과 드리프트 현상의 변동성에 대한 분산을 나타낸다. 자이로 센서의 드리프트에 대한 분산은 정확한 계산이 어려워, 기존의 아두이노 라이브러리에서 사용된 과 를 사용하였다(Kristian Lauszus, 2017). 측정 잡음 공분산 행렬 은 측정값(가속도로 측정한 기울기)의 불확실성을 수학적으로 모델링 한 것이다. 이 값에 따라 알고리즘에서 측정값을 얼마나 신뢰할지 결정된다. 이 클수록 측정값의 오차가 크다는 의미가 되며, 이에 따라 예측값을 더 많이 신뢰하게 된다. 3.1장의 수평면(0°)의 축 방향 기울기를 측정 결과를 근거로 하여 로 설정하였다.
3.6 필터링 방법 적용 결과
Fig. 10은 벽체 기울기 측정 시스템에 필터링 방법을 적용하여 수평면(0°)에서 축 기울기를 측정한 결과이다. Table 3은 필터링 방법 적용 전후의 노이즈 변동 폭을 비교한 데이터로, 필터링을 적용하기 전에는 노이즈의 변동 폭이 0.123°였으나, 적용 후 노이즈가 감소하며 데이터의 정밀도가 향상된 것을 확인할 수 있었다.
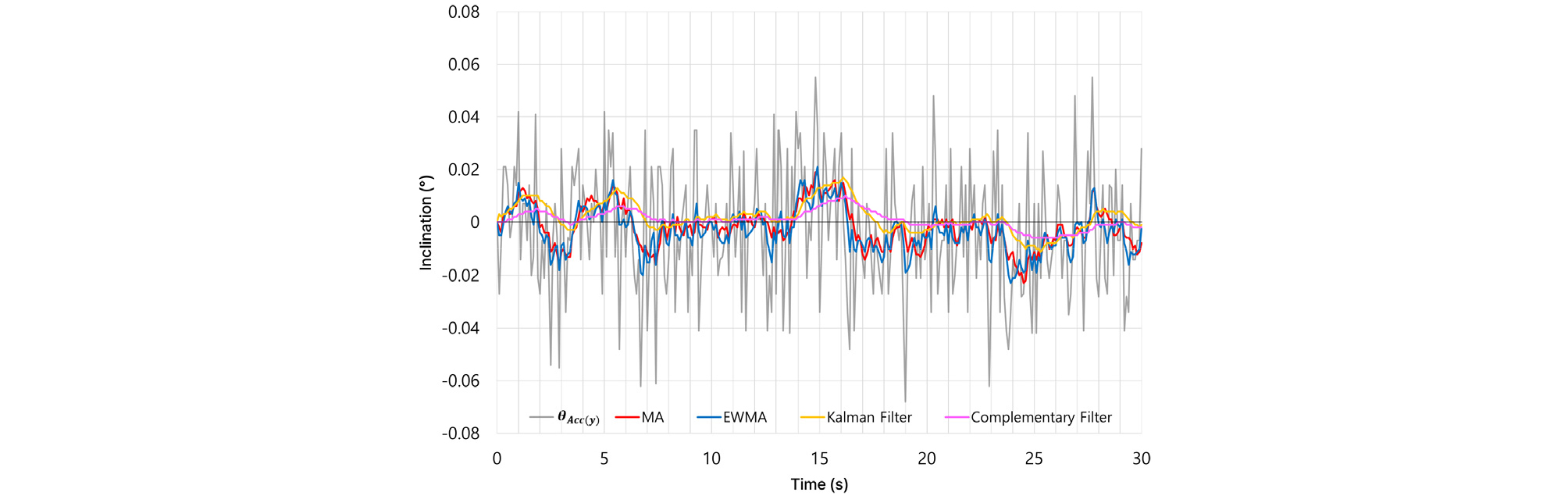
Table 3.
Noise Variation after Individual Filtering
그러나, 옹벽과 같은 벽체 구조물의 계측에는 더 높은 정밀도가 요구된다. 예를 들어, DGSI의 Digitilt AT System 지중경사계는 반복성(Repeatability)이 ±0.003°에 달한다(DGSI, 2024).
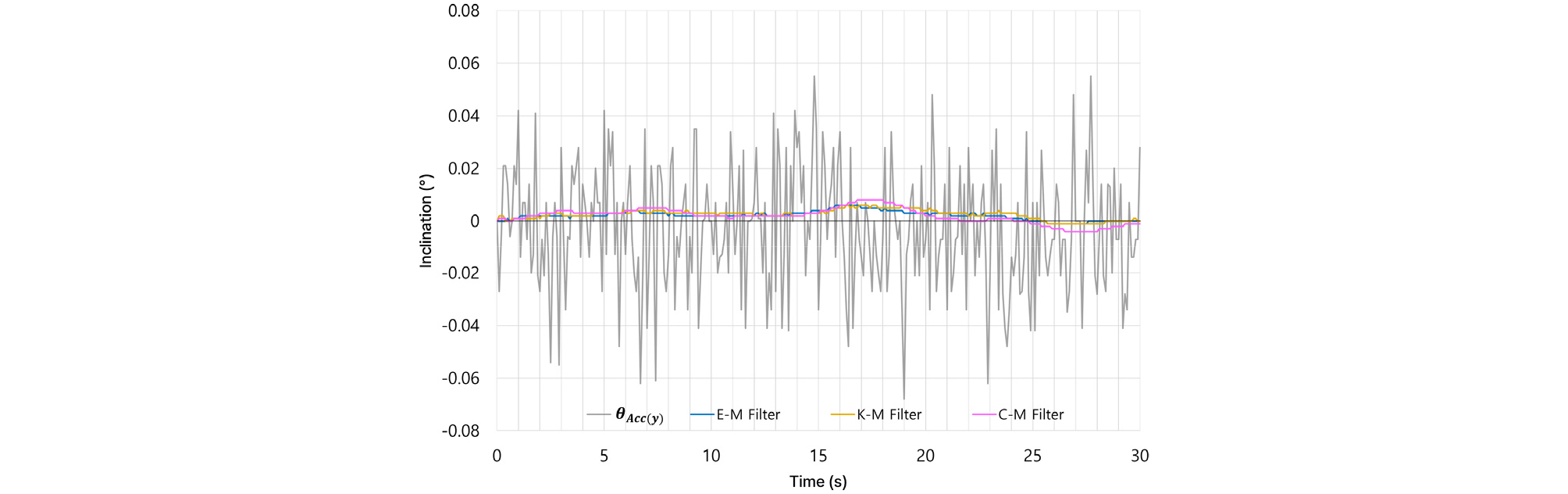
본 연구에서는 각 필터링 방법에 이동평균을 추가로 적용하여 더 높은 수준의 정밀도를 확보하고자 하였다. 이를 위해 EWMA에 이동평균을 적용한 E-M필터, 칼만필터에 이동평균을 적용한 K-M필터, 상보필터에 이동평균을 적용한 C-M필터의 세 가지 필터링 조합에 대한 노이즈 개선 및 정밀도 향상 효과를 비교하였다. 아래의 Fig. 11은 벽체 기울기 측정 시스템에 필터링 조합 방법을 적용하여 수평면(0°)의 축 기울기를 측정한 결과이며, Table 4는 측정값의 노이즈 변동 폭을 비교한 데이터이다. 결과적으로 E-M필터, K-M필터, C-M필터를 사용하였을 때 모두 노이즈의 변동 폭이 0.01° 수준으로 감소하였다. 다만, C-M필터의 경우, 자이로 센서에서 발생한 드리프트 현상의 영향이 완전히 제거되지 않아 변동 폭이 상대적으로 크게 나타났다.
4. 정확도 검증 시험
4.1 검증 시험 방법
검증 과정에서는 DGSI(2024)사의 2축 지중경사계(Digitilt AT System)의 측정치를 기준값으로 설정하였다. 해당 계측기기는 Table 5에 나타난 것과 같이 0.005mm의 분해능과 ±0.003°의 반복성을 갖추고 있어 신뢰성이 매우 높다.
Table 5.
Specifications of the digitilt AT system (DGSI, 2024)
| Metric | |
| Tilt Sensors | MEMS x 2 |
| Wheel Base | 500 mm |
| Range | ±30° |
| Resolution | 0.005 mm |
| Repeatability | ±0.003° |
| Temp Rating | -20 to +70°C |
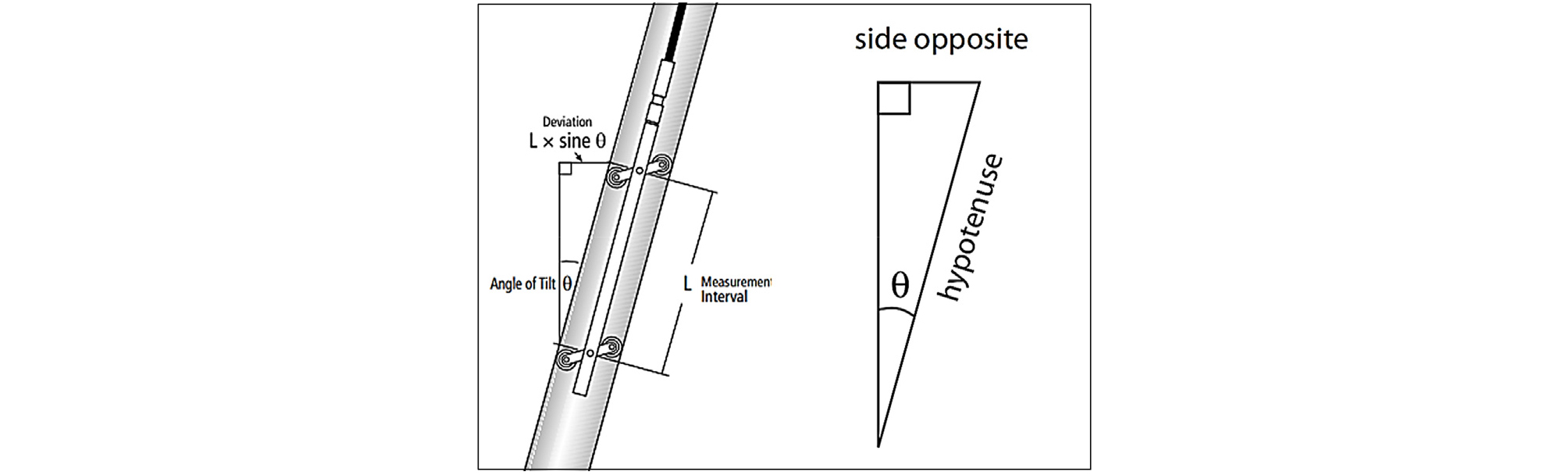
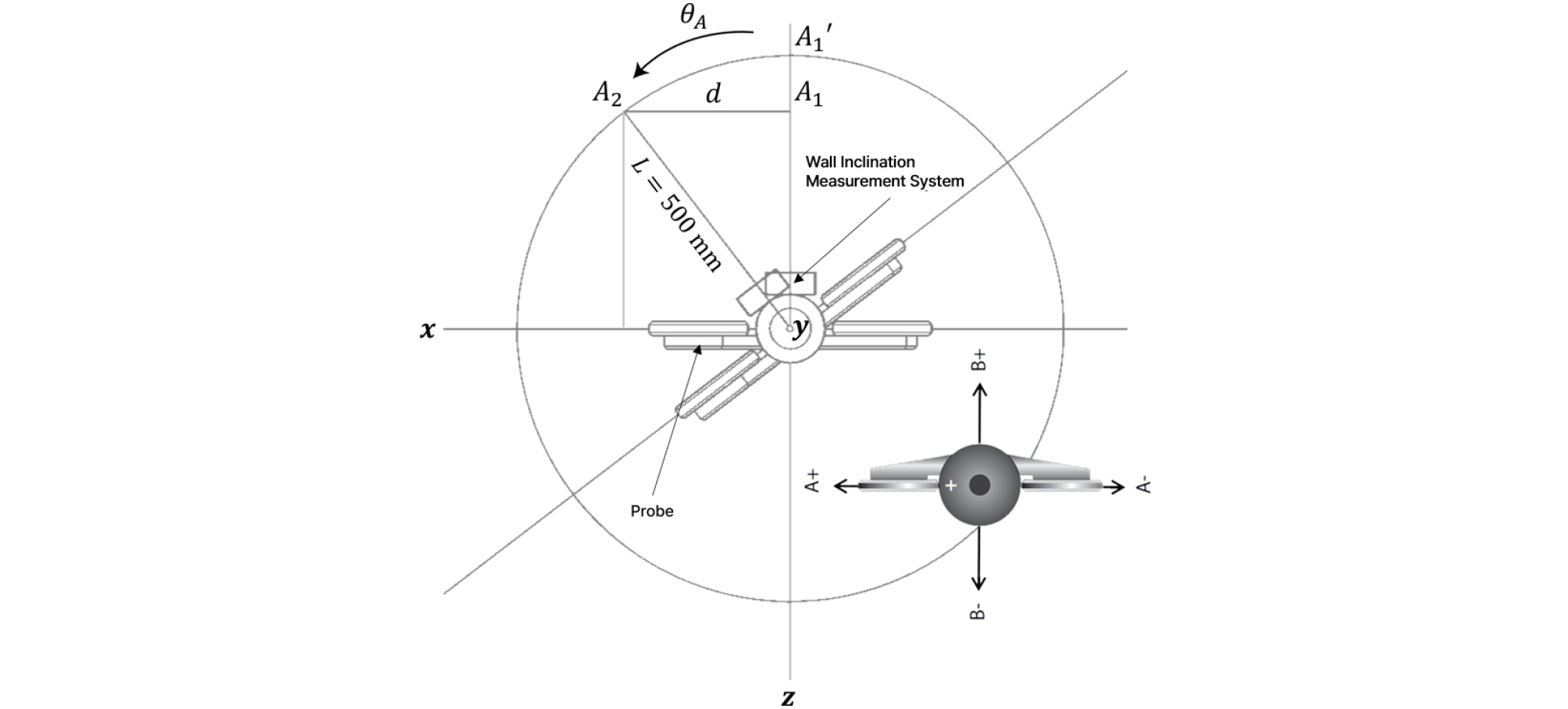
한편, 지중경사계를 통해서 읽을 수 있는 값은 변위(mm)로, 벽체 기울기 측정 시스템의 측정값(°)과 직접 비교할 수 없다. 아래의 Fig. 12는 회전각을 기반으로 변위를 계산하는 지중경사계의 원리를 나타내며, 변위()는 식 (6)에 의해서 계산된다. 따라서 지중경사계 프로브가 회전한 각도()는 지중경사계의 출력 변위()로부터, 식 (7)을 바탕으로 계산할 수 있다.
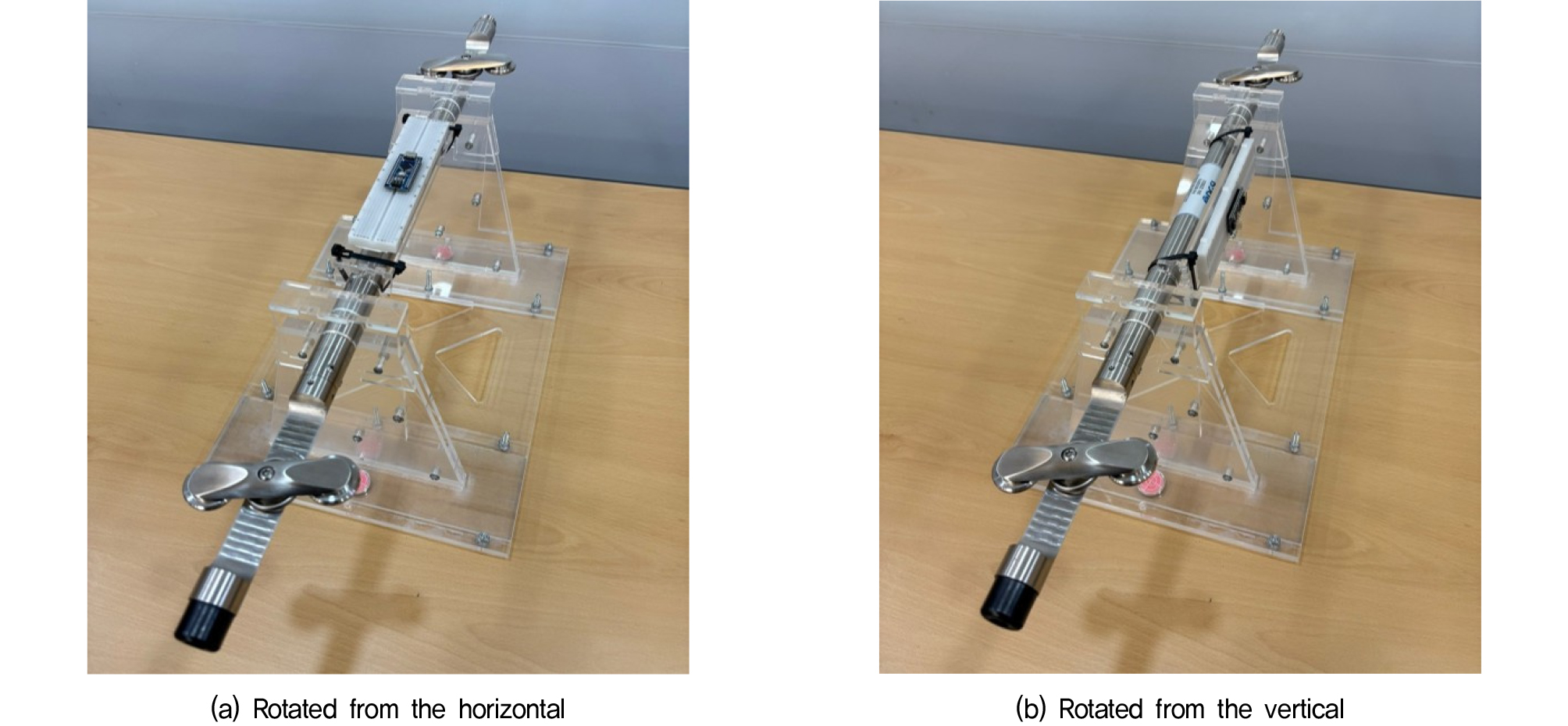
시험은 지중경사계의 프로브에 벽체 기울기 측정 시스템을 부착한 상태에서 프로브를 회전 시켜, 두 기기의 회전각을 비교하는 방식으로 진행되었다. 이때, 벽체 기울기 측정 시스템은 Fig. 13a과 같이 지면과 0°를 이루는 수평 상태와, Fig. 13b와 같이 지면과 90°를 이루는 수직 상태로 설정된다. 프로브는 시험 장치에 의해서 고정되어 Fig. 14에서와 같이 축을 중심으로만 회전하여 변위 ()가 발생한다. 는 프로브의 회전각으로, 벽체 기울기 측정 시스템의 (을 중심으로 한 기울기)에 대응되는 값이다.
이 과정에서, 변위가 지속적으로 발생하는 벽체 구조물의 거동 특성을 반영하기 위해, 국내에서 통용하는 허용 수평변위 기준인 0.03H(회전각으로 환산시 1.72°)를 고려하였고, 단계적으로 회전각을 증가하여 최종적으로 약 3.0°에 도달하도록 하였다.
4.2 검증 결과
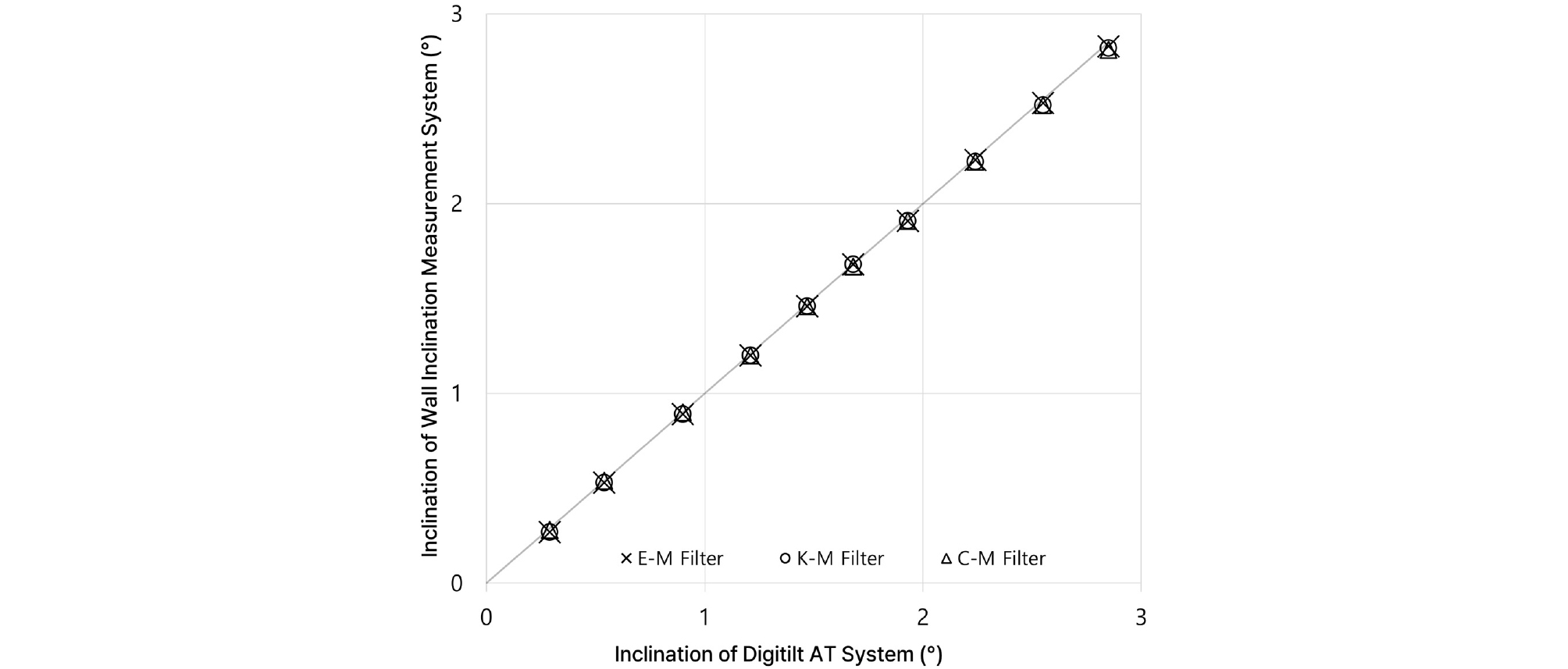
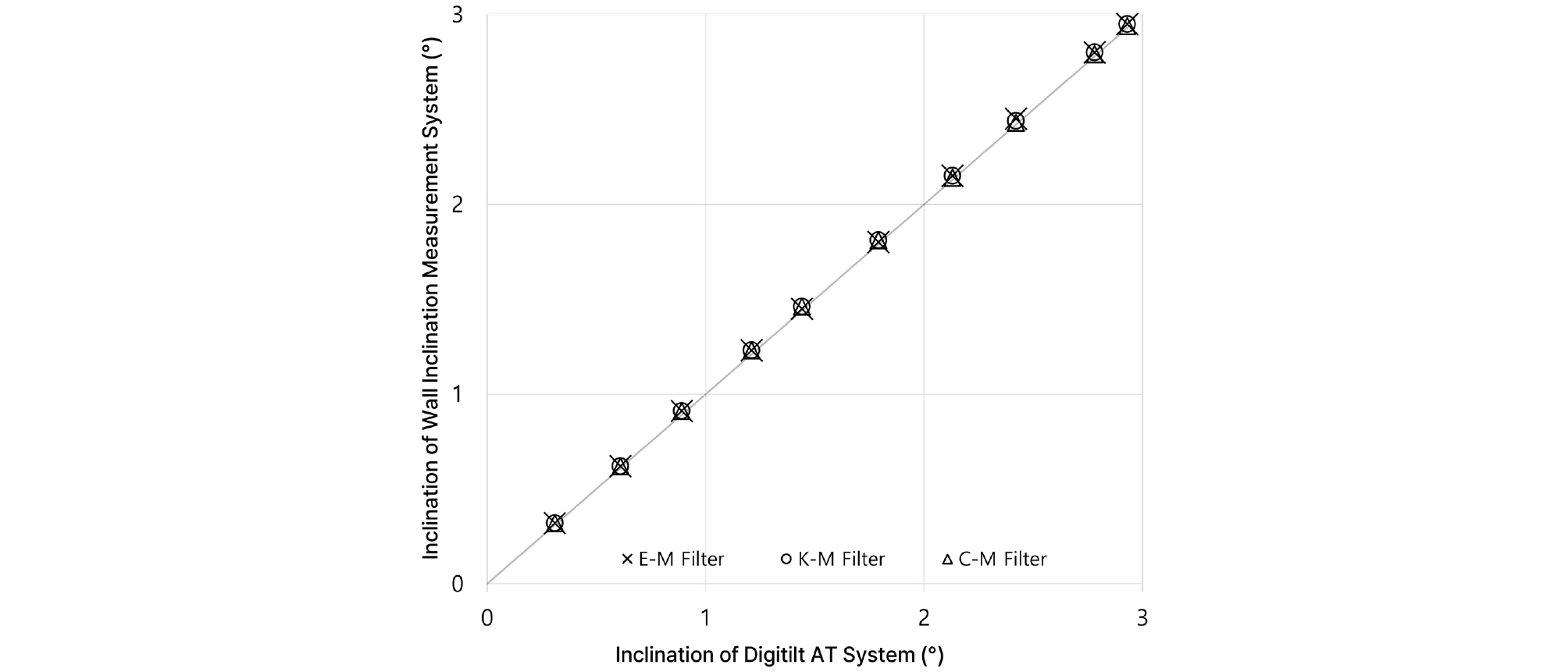
상기한 조건을 바탕으로 수평 혹은 수직 상태에서 시작하여 10단계에 걸쳐 약 3.0°에 도달하는 시험 과정을 각각 3회씩 수행하였으며, 아두이노 측정 결과와 지중경사계의 측정 결과 사이의 오차 MAPE를 산정하였다. 식 (8)에서 는 지중경사계의 프로브가 회전한 각도, 는 벽체 기울기 측정 시스템이 회전한 각도, 은 각 시험 과정에서 수집된 데이터 개수이다.
시험 결과는 수평 및 수직 상태의 시험 결과를 대표하여 Fig. 15와 Fig. 16으로 나타내었으며, 각 시험 회차별 필터링 조합에 대한 오차 수준과 평균값은 Table 6과 Table 7에 정리하였다. 수평 및 수직 상태에서 시작한 시험 간 유의미한 오차 수준의 차이는 없었으며, 3가지 필터링 조합 모두 DGSI Digitilt AT System 지중경사계의 측정값을 기준으로 1.5%~2.0%의 범위의 MAPE를 보였다. 이로써 벽체 기울기 측정 시스템이 주어진 범위 내에서 높은 정확도를 보여, 저비용 오픈소스 하드웨어를 활용한 계측 기기의 현장 적용 가능성을 확인하였다. 본 결과는 실내시험을 기반으로 한 것이므로, 실제 현장 조건에서 발생할 수 있는 영향 요인을 고려한 추가적인 검증 과정이 필요할 것으로 판단한다.
5. 결 론
본 연구에서는 고가의 기존 벽체 구조물 계측기기에 대한 경제적인 대안으로, 저비용 오픈소스 하드웨어인 아두이노 보드 기반의 벽체 기울기 측정 시스템을 제안하였다. 아두이노 출력 결과의 노이즈 및 오차 개선을 위해 이동평균, EWMA, 상보필터, 칼만필터를 적용하였으나, 단일 필터만으로는 실제 계측 환경에서 요구하는 수준의 정밀도를 만족하지 못했다. 이에 EWMA, 상보필터, 칼만필터에 이동평균을 추가로 적용한 조합필터를 통해 정밀도를 개선하였다.
조합 필터인 E-M필터, K-M필터, C-M필터를 적용한 결과 노이즈의 변동 폭이 0.01° 수준으로 감소하여 소수점 둘째 자리(0.01°)의 정밀도를 확보할 수 있었다. 다만, 자이로 센서의 반영률이 큰 C-M 필터의 경우, 자이로 센서의 드리프트 영향으로 인해 노이즈 변동 폭이 다른 필터 조합에 비해 상대적으로 크게 나타났다.
검증 결과, 아두이노 보드를 활용한 벽체 기울기 측정 시스템에 적용된 3가지 필터링 조합은 모두 1.5%~2.0%의 MAPE를 보였다. 이는 0.03H(회전각으로 환산 시 1.72°)를 기준으로 약 0.03°에 해당하는 오차로, 국내에서 통용되는 벽체 구조물(옹벽)의 허용 수평변위 기준에 대해 신뢰할 수 있는 측정값을 제공함을 확인하였다.
본 연구를 통해 저비용 오픈소스 하드웨어를 활용한 계측 기기의 현장 적용 가능성을 확인하였으며, 향후 기존 계측 시스템의 경제적 대안으로써 안전 관리에 기여할 수 있을 것으로 기대된다.
