

1. 서 론
2. 그라우저 효과를 고려한 야지궤도차량 지반추력 평가방법
2.1 기존의 야지궤도차량 지반추력 평가이론
2.2 그라우저 효과를 고려한 지반추력 평가방법 제안
3. 야지궤도차량 지반추력 평가조건
3.1 지반조건
3.2 차량조건
4. 야지궤도차량 지반추력 평가결과
4.1 제안된 방법 및 기존방법을 통해 평가된 야지궤도차량 전체지반추력-슬립율 관계
4.2 그라우저 형상비에 따른 야지궤도차량의 지반추력
5. 결 론
1. 서 론
무한궤도(continuous track)는 차륜에 비해 구동의 자율성은 떨어지지만 넓은 접지면적을 제공하여 지반에 가해지는 접지압을 낮추고 큰 구동력을 확보할 수 있으므로, 야지를 구동하며 작업을 수행하는 대형장비(군용 및 건설용 중장비 등)에 널리 적용되고 있다(Yong et al., 1984). 노면의 강도가 충분하여 엔진출력을 모두 유용한 구동력으로 전환시킬 수 있는 도로주행차량과 달리, 포장되지 않은 야지를 구동하는 궤도차량(이하 야지궤도차량)의 구동성능은 지반-궤도 접지면에서 발생되는 지반의 전단현상에 의해 제한된다(Wong, 1989). 무한궤도를 통해 전달된 엔진출력은 지반-궤도 접지면에서 지반의 전단변위 및 이에 따른 전단력을 발현시키는데, 지형역학분야(terramechanics)에서는 이를 각각 슬립변위(slip displacement) 및 지반추력(soil thrust)이라고 명명하며 지반추력의 반력(reaction force)이 야지궤도차량의 구동력으로 작용한다.
지반의 전단특성에 따라, 슬립변위가 증가하면 큰 지반추력이 발현되어 야지궤도차량의 구동력이 커지지만 그만큼 무한궤도의 회전이 차량의 이동변위로 전환되지 못하여 구동효율이 감소한다. 즉, 야지궤도차량의 구동성능을 확보하기 위해서는 구동할 수 있을 만큼의 충분한 지반추력을 최소한의 슬립변위와 함께 발현시키는 것이 중요하다. 따라서 전단강도가 작은 연약한 지반과 같이 야지궤도차량의 구동에 필요한 지반추력을 확보하기 어렵거나 매우 큰 슬립변위가 발생해야만 확보 가능한 경우, 구동성능을 개선하기 위하여 무한궤도 표면에 그라우저(grouser)를 부착한다(Yong et al., 1984).
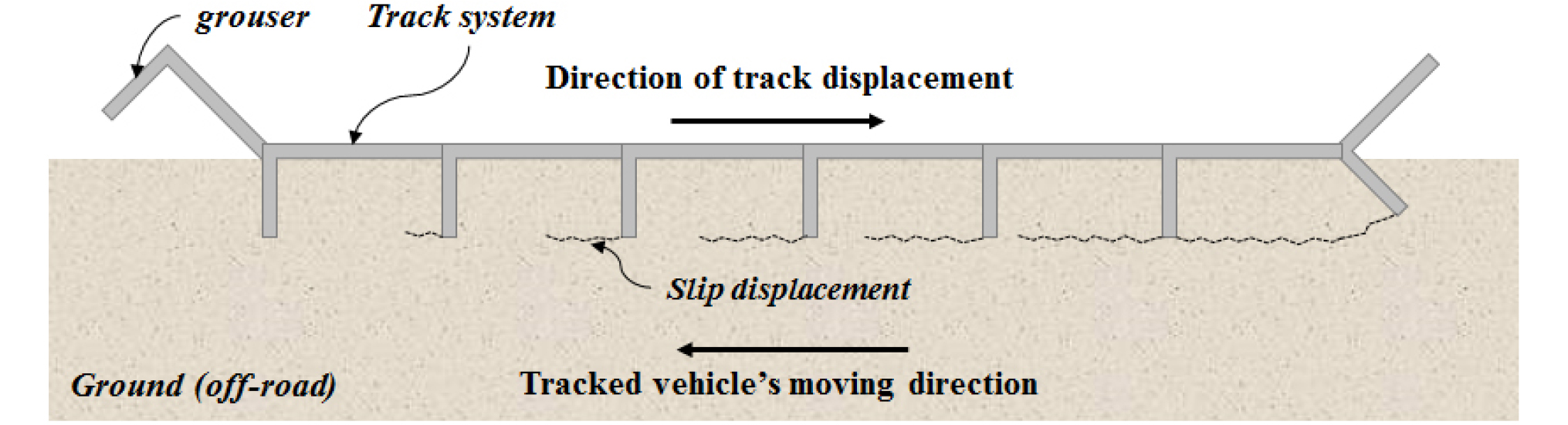
여러 연구자들(Bekker, 1956; Grecenko, 2007a; Baek, 2018)은 그라우저 효과를 평가하기 위한 연구를 수행하여, 그라우저가 궤도 측면에서 추가적인 전단력을 발현시킴으로서 지반추력을 증가시키는 효과가 있음을 밝혔다. 연구결과에 따르면 무한궤도에 부착된 그라우저에 의해 지반블록이 형성되고 전단되며 지반블록의 저면 및 측면에서 발생된 전단력(각각 저면지반추력 및 측면지반추력)을 통해 지반추력을 평가할 수 있다. 이들 연구는 지반블록에서 발생하는 전단력이 지반-궤도 접지면을 따라 동일하다고 보고 지반추력을 평가하는데, 실제로는 각각의 그라우저 사이에서 독립된 지반블록이 형성되고 전단되므로 각 지반블록에서 발현되는 슬립변위 및 지반추력은 위치에 따라 다르게 나타난다(Grecenko, 2007b). 즉, Fig. 1에 나타낸바와 같이 야지궤도차량 진행방향 기준으로 앞쪽에 위치한 지반블록은 슬립변위가 크지 않은 상태(전단이 많이 진행되지 않은 상태)로 지반추력이 작고, 뒤로 갈수록 전단이 진행됨에 따라 슬립변위 및 지반추력이 커지게 된다. 이러한 기존연구의 한계를 극복하고자 Grecenko(2007b)가 지반블록의 독립전단을 고려하여 야지궤도차량의 지반추력을 평가하기 위한 연구를 수행한 바 있으나, 특정한 시험조건에서 결정된 하나의 지반추력-슬립변위 관계를 적용한 제한적인 결과였다.
본 연구는 그라우저 효과를 적절히 고려하여 야지궤도차량의 지반추력을 평가하기 위한 기초연구로서 수행되었다. 우선 여러 연구자들(Janosi and Hanamoto, 1961; Wong, 1983)이 제시하고 있는 전단력-전단변위 관계를 바탕으로 야지궤도차량 전체지반추력 평가방법을 새로이 제안하였다. 본 연구에서 제안된 방법 및 기존의 평가방법을 바탕으로 그라우저의 길이와 간격 및 형상비(=간격/길이)가 야지궤도차량의 지반추력에 미치는 영향을 평가였고, 그 결과를 야지궤도차량 운용 시 활용 가능하도록 하였다.
2. 그라우저 효과를 고려한 야지궤도차량 지반추력 평가방법
2.1 기존의 야지궤도차량 지반추력 평가이론
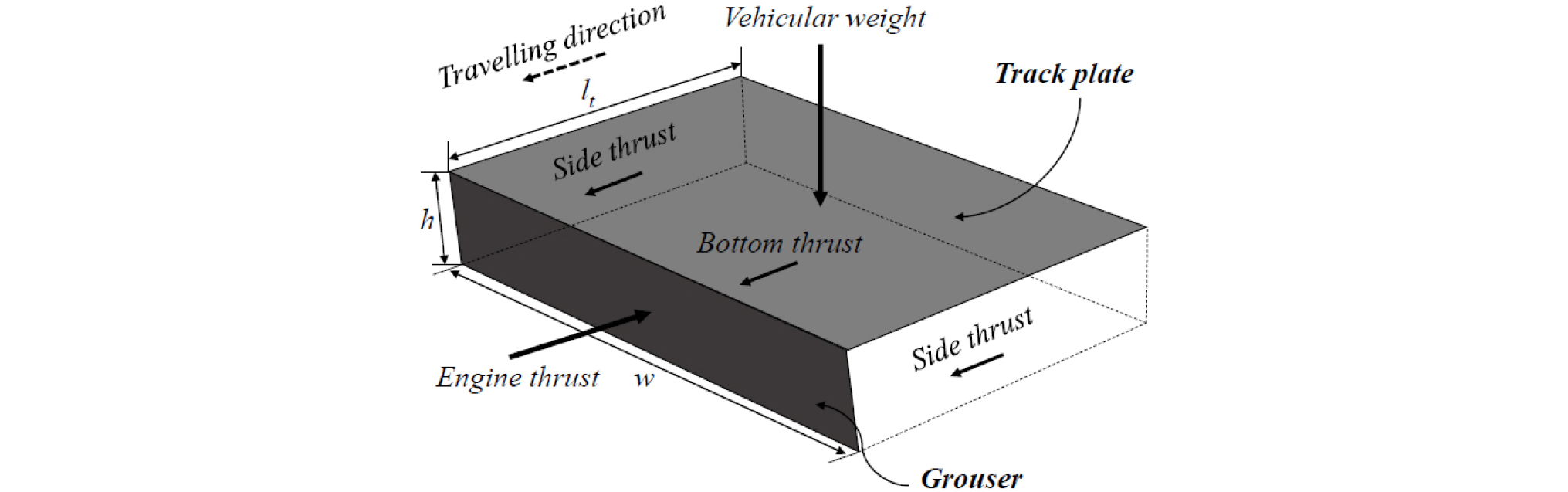
Fig. 2는 무한궤도 내에 lt 간격으로 부착된 하나의 궤도시스템(single track system) 및 여기서 발현되는 지반추력을 보여준다. 야지궤도차량 구동 시 엔진출력이 궤도시스템(궤도판 및 그라우저)을 통해 지반에 전달되면 궤도시스템에 의해 형성된 지반블록의 저면 및 측면지반을 따라 지반의 전단력이 발현된다. 지반추력은 발현된 전단력의 반력으로 작용하므로 지반블록의 저면 및 측면에서 발현되는 전단응력을 전단면적에 대해 적분하여 평가할 수 있다. Bekker(1956)는 탄성이론을 바탕으로 지반블록의 저면 및 측면에서 지반의 전단강도(τmax)가 발현되었을 때의 지반추력인 최대지반추력(Fmax)을 식 (1)과 같이 나타냈다.
(1)
여기서, c와 는 지반의 점착력 및 마찰각, σv'은 궤도시스템 저면의 지반 유효연직응력, w와 l은 지반-궤도 접지면의 너비 및 길이로 무한궤도 저면의 너비 및 길이로 나타낼 수 있으며, h는 그라우저의 길이를 의미한다.
지반에서 발생되는 전단변위가 점차 증가하면 전단응력이 증가하다가 전단강도에 수렴하거나(hardening behavior) 혹은 전단응력이 증가하다가 전단강도를 넘어서면 감소하므로(softening behavior), 지반추력 또한 슬립변위(지반-궤도 접지면에서 발생하는 전단변위)에 따라 동일한 경향을 보인다(Fig. 3 참고). 지형역학 분야에서는 Janosi와 Hanamoto(1961)와 Wong(1983)이 각각 hardening behavior(Fig. 3(a)) 및 softening behavior(Fig. 3(b))를 나타내기 위해 제안한 전단력-전단변위 관계식을 지반추력 평가 시 적용한다. 아래 식 (2)와 (3)은 각각 hardening behavior 및 softening behavior를 보이는 지반추력-슬립변위 관계식을 나타낸다.

(2)
(3)
여기서, j는 슬립변위, K와 Kw는 전단변형상수, Kr는 최대지반추력과 잔류지반추력(residual soil thrust)의 비(=Fmax/Fres)를 의미하며, Fmax는 식 (1)을 통해 산정하여 대입한다(Fig. 3 참고).
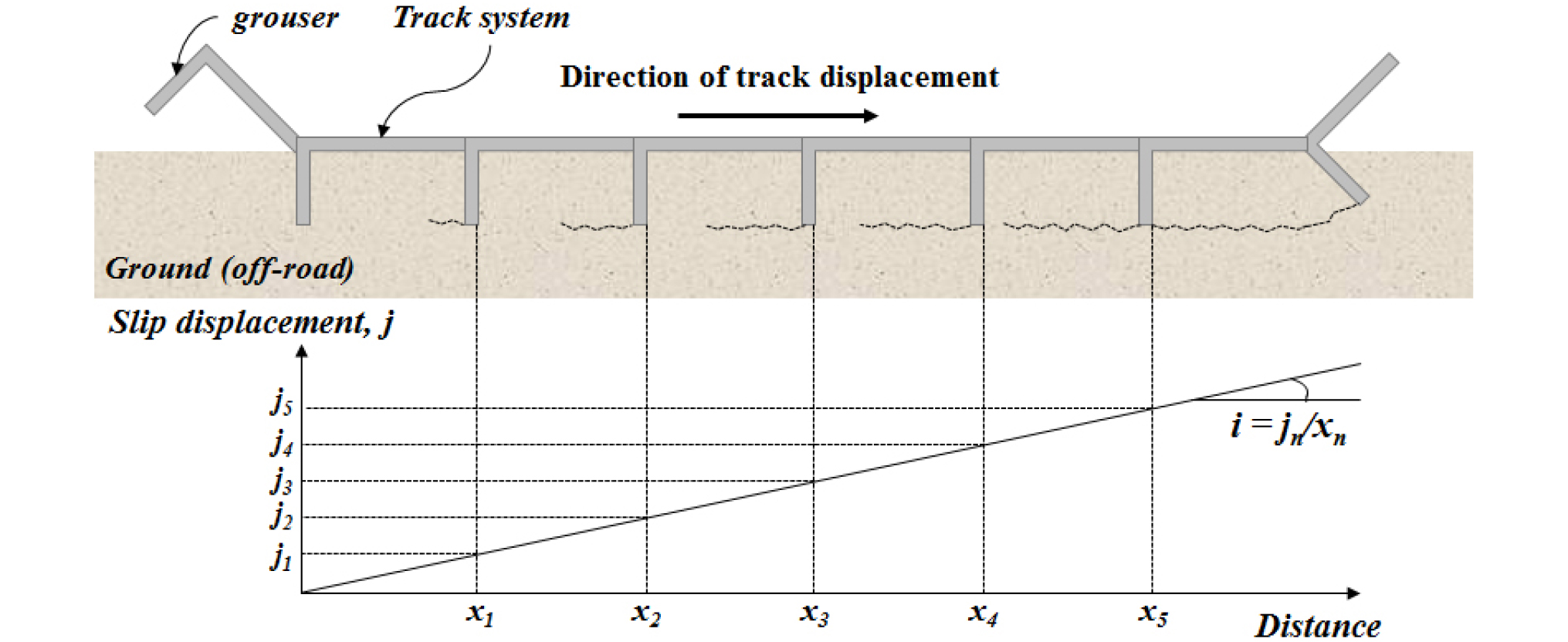
Bekker(1956)는 무한궤도에 접한 지반조건이 위치에 따라 크게 다르지 않다는 가정 하에, 궤도시스템이 지반-궤도 접지면의 첫 번째 지점으로부터 x만큼 이동할 때 발생되는 슬립변위의 상대적인 크기를 슬립율(slip ratio, i=j/x)이라 정의하였다(Fig. 4 참고). 앞서 언급한바와 같이 기존 이론에서는 지반-궤도 접지면의 위치에 따른 슬립변위 및 지반추력 차이를 고려하지 않기 때문에, 전체 무한궤도의 슬립변위는 슬립율과 지반-궤도 접지면 길이의 곱(j=il)으로, 전체지반추력(Ft)은 이를 식 (2)와 (3)에 대입하여 다음과 같이 산정한다.
(4)
(5)
이상과 같이 야지궤도차량의 전체지반추력과 슬립율의 관계는 구동지반의 전단강도 및 변형특성과 무한궤도 및 그라우저의 재원으로 나타낼 수 있으며, 슬립율에 따른 전체지반추력을 평가하여 그라우저가 부착된 야지궤도차량의 구동력 및 구동효율 등을 예측할 수 있다. 그러나 앞서 언급한바와 같이, 야지궤도차량 구동 시 지반추력이 지반-궤도 접지면을 따라 균등하게 발현되지 않기 때문에 그 결과는 실제와 차이가 있을 것으로 판단된다(Grecenko, 2007b). 또한 Park(1996)의 실험적 연구에 따르면 그라우저의 길이(h)와 간격(lt)의 비를 의미하는 형상비(shape ratio, lt/h)가 야지궤도차량의 지반추력에 지배적인 영향을 미치지만(Fig. 2 참고), 기존의 산정식(식 (4)와 (5))에는 그라우저 간격에 대한 고려가 되어있지 않다는 한계가 있었다.
2.2 그라우저 효과를 고려한 지반추력 평가방법 제안
야지궤도차량 구동 시 지반-궤도 접지면에서는 각각의 그라우저에 의해 지반블록이 형성되고 무한궤도가 회전함에 따라 각각 독립적으로 전단된다. 따라서 야지궤도차량 진행방향 기준으로 앞쪽에 위치한 지반블록은 전단이 많이 진행되지 않은 상태로 슬립변위 및 지반추력이 작고, 뒤로 갈수록 전단이 진행됨에 따라 슬립변위 및 지반추력이 커지게 된다(Fig. 4 참고).
Fig. 4에 나타낸바와 같이, 야지궤도차량이 슬립율 i로 구동하는 경우 지반-궤도 접지면의 첫 번째 지점으로부터 특정한 거리(xn)만큼 떨어져 있는 지반블록에서 발생하는 슬립변위(jn)는 슬립율과 거리의 곱(ixn)으로 나타낼 수 있다. 이때, 무한궤도에 부착된 그라우저의 간격이 lt라면 길이가 l인 지반-궤도 접지면은 N=l/lt개의 지반블록으로 나누어져 전단되며, 지반-궤도 접지면의 첫 번째 지점으로부터 n번째 위치의 지반블록까지 거리는 lt(n-1)=l(n-1)/N 이다. 따라서 지반-궤도 접지면의 첫 번째 지점으로부터 n번째 위치의 지반블록에서 발생하는 슬립변위를 식 (6)과 같이 정리할 수 있다.
(6)
식 (6)의 슬립변위를 식 (2)와 (3)에 대입하면 지반-궤도 접지면의 첫 번째 지점으로부터 n번째 위치의 지반블록에서 발생하는 지반추력(Fn)을 다음과 같이 나타낼 수 있다.
(7)
(8)
또한 무한궤도의 전체지반추력은 각각의 지반블록에서 발현된 지반추력의 합으로 평가할 수 있으므로, 구동지반의 전단력-전단변위 관계가 hardening behavior 및 softening behavior를 보이는 경우 야지궤도차량의 전체지반추력은 각각 식 (9)와 (10)으로 나타낼 수 있다.
(9)
(10)
이상과 같이 제안된 방법을 통해 그라우저가 부착된 야지궤도차량의 슬립율에 따른 전체지반추력을 평가하여 구동력 및 구동효율 등을 예측할 수 있다. 또한 기존 연구와 달리 그라우저 간격(lt=l/N)에 따른 지반추력의 차이를 고려할 수 있어, 야지궤도차량의 지반추력에 지배적인 영향을 미치는 형상비(=lt/h)의 변화에 따른 전체지반추력을 평가함으로서 최적 그라우저 형상비 등을 평가하는데 활용될 수 있을 것으로 판단된다.
3. 야지궤도차량 지반추력 평가조건
3.1 지반조건
식 (4), (5), (9), (10)에서 알 수 있듯이, 야지궤도차량의 전체지반추력을 평가하기 위해서는 c, , K, Kw, Kr과 같은 구동지반의 전단특성을 파악해야 한다. 본 연구에서는 Wong(1989)이 이와 같은 전단특성을 베바미터(bevameter) 시험을 통해 제시하고 있는 다양한 사질토 지반 중, 전단력-전단변위 관계가 hardening behavior 및 softening behavior를 보이는 지반을 하나씩 선정하였다. 여기서, 베바미터 시험이란 Bekker(1969)가 개발한 이래 지형역학분야에서 가장 널리 활용되고 있는 현장지반의 강도 및 변형특성 평가방법으로, 전단링(shear ring)의 전단시험 및 평판(penetration plate)의 재하시험을 통해 지반의 전단특성 및 압축특성을 각각 평가한다(Fig. 5 참고).

두 평가대상지반의 전단특성을 Table 1에 정리하여 나타냈다. 이때, 평가대상지반의 전단특성이 softening behavior인 경우가 hardening behavior인 지반에 비해 전단강도정수 및 건조단위중량이 더 컸는데, 이는 조밀할수록 softening behavior를 보이는 사질토 지반의 일반적인 전단특성과 유사했다(Lambe and Whitman, 1979).
Table 1. Soil parameters for the assesment of soil thrust of off-road tracked vehicles (Wong, 1989)
| Shearing behavior | K (cm) | Kw (cm) | Kr | c (kPa) | (°) | γd (g/cm3) |
| Hardening behavior | 1.15 | - | - | 1.15 | 31.5 | 1.44 |
| Softening behavior | - | 6.1 | 0.659 | 2.2 | 39.4 | 1.64 |
3.2 차량조건
본 연구에서는 Wong과 Huang(2006)의 연구를 참고하여, 실제로 운용되고 있는 군용 야지궤도차량인 11.3톤 중량의 장갑차(armored personnel carrier)를 대상으로 지반추력 평가를 수행하였다. 또한 국내의 대표적인 그라우저 제작사인 현대제철(Hyundai steel)의 상용 그라우저 길이(약 25~70mm) 및 형상비(약 2.3~3.9)를 고려하여, 평가 시 적용할 그라우저의 길이(25mm, 50mm, 70mm)와 형상비(1.3, 1.9, 2.5, 3.8, 4.8, 7.6)를 결정하였다. 즉, 서로 다른 18가지 제원을 가진 그라우저가 평가대상 야지궤도차량에 부착되어 있는 경우의 지반추력을 각각 평가했는데, 그라우저 길이 및 형상비에 따른 중량 차이가 미미하다고 판단하여 모든 경우에 동일한 차량중량 11.3톤을 적용하였다. 지반추력 평가 시 활용한 야지궤도차량 및 그라우저의 형상 및 제원을 Fig. 6 및 Table 2에 각각 나타냈다.
Table 2. Vehicle parameters for the assesment of soil thrust of off-road tracked vehicles

4. 야지궤도차량 지반추력 평가결과
4.1 제안된 방법 및 기존방법을 통해 평가된 야지궤도차량 전체지반추력-슬립율 관계
본 연구에서는 제안된 방법 및 Bekker(1956)의 이론을 기반으로 하는 기존방법을 통해 사질토로 구성된 대상지반에서 야지궤도차량의 전체지반추력-슬립율 관계를 평가하였다. 두 대상지반의 전단력-전단변위 관계가 각각 hardening behavior 및 softening behavior를 보였으므로, Table 1과 Table 2에 제시된 구동조건을 각각 식 (4)와 (9) 및 식 (5)와 (10)에 대입하여 전체지반추력-슬립율 관계를 도출하였다. 또한 평가대상 야지궤도차량에 그라우저가 부착되지 않은 경우(h=0)의 전체지반추력-슬립율 관계도 평가하여 그라우저 효과분석 시 활용하였다. 그라우저가 부착된 경우 지반추력은 지반블록을 따라 발현되는 전단력(점착력 및 마찰각)으로 결정되지만, 그라우저가 부착되지 않은 경우에는 무한궤도와 지반의 접촉면에서의 전단(지반-궤도의 부착력 및 마찰계수)에 따라 지반추력이 발현된다. 따라서 지반-궤도의 부착력 및 마찰계수를 Table 2에 제시된 점착력 및 마찰각의 2/3값으로 결정한 뒤 식 (4)와 (5)에 대입하여 그라우저가 부착되지 않은 경우의 전체지반추력-슬립율 관계를 도출하였다. 일반적으로 슬립율 0~0.2 범위의 야지궤도차량 구동성능이 평가지표로 널리 활용되는 것을 참고하여(Wong, 1989), 본 연구의 전체지반추력-슬립율 관계 또한 슬립율 0~0.2 범위에 대해 도시하였다(Fig. 7 및 Fig. 8).
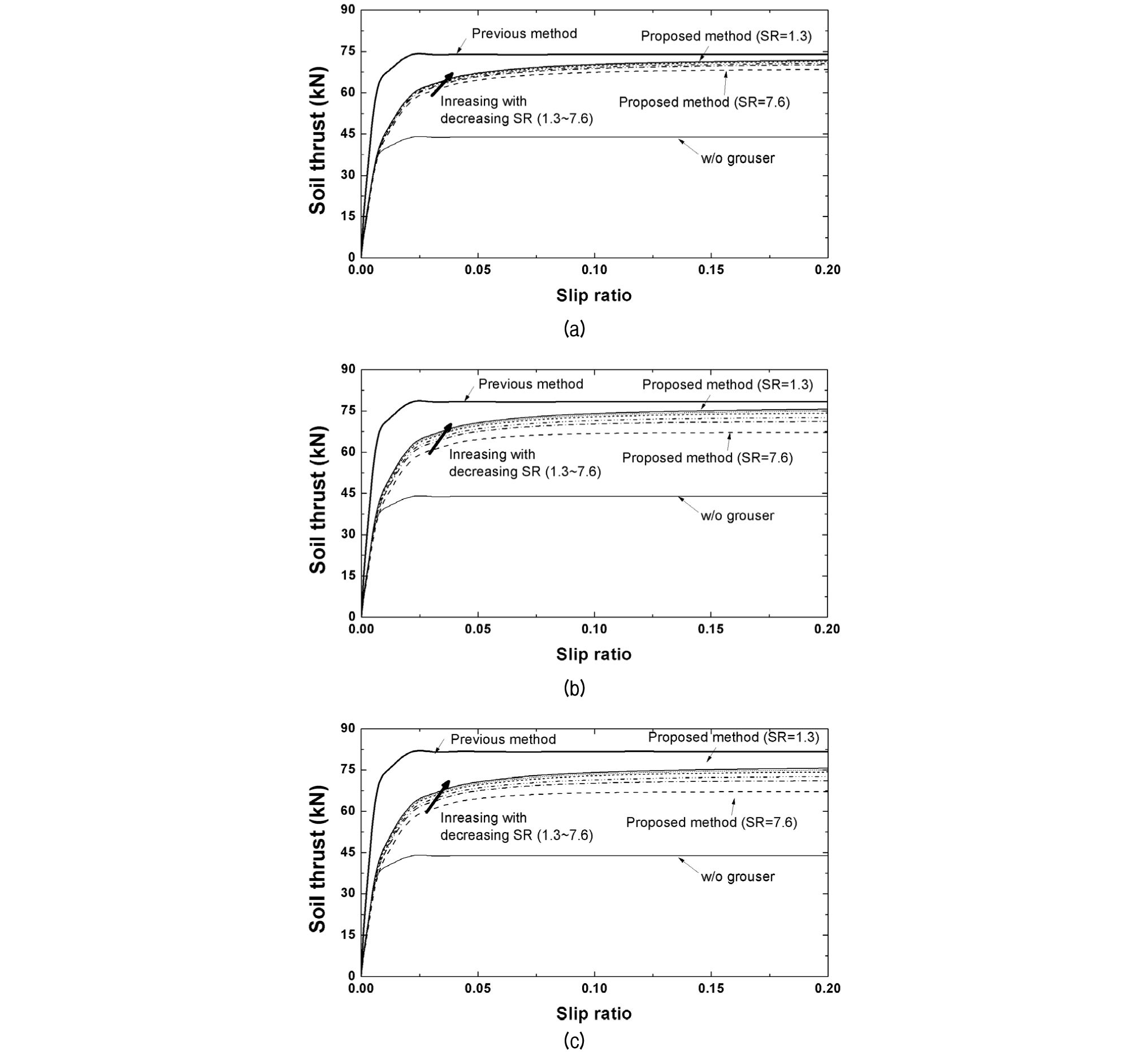

Fig. 7과 Fig. 8에서 확인할 수 있듯이, 두 대상지반 모두에서 그라우저가 부착됨에 따라 특정 슬립율 수준에서 발현되는 야지궤도차량의 전체지반추력이 증가하여 구동성능이 개선되는 것으로 나타났다. 이는 그라우저가 궤도저면과 지반 사이에서 발생하는 전단을 지반과 지반사이의 전단으로 전환시켜 전단력을 증가시키며, 궤도 측면에서 측면지반추력을 추가로 발현시킴으로서 지반추력을 증가시키는 효과가 있었기 때문이다. 또한 Choi et al.(2003)의 실험적 연구와 유사하게 그라우저의 길이가 증가할수록 지반추력이 증가하며 그라우저의 길이가 동일한 경우 형상비가 감소할수록 전체지반추력이 대체적으로 증가하는 것으로 나타났는데, 이는 다음장에서 보다 자세히 분석하였다.
그라우저 효과를 고려하여 평가된 야지궤도차량 전체지반추력-슬립율 관계는 기존방법과 제안된 방법에서 큰 차이를 보였다(Fig. 7 및 Fig. 8). 기존방법은 특정 슬립율 수준에서 발생되는 슬립변위가 지반-궤도 접지면을 따라 모두 동일하다고 보는 반면, 제안된 방법은 야지궤도차량 진행방향 기준으로 앞쪽은 슬립변위가 작고 뒤로 갈수록 전단이 진행되어 슬립변위가 커진다고 보고 지반추력을 산정하기 때문이다. 이때, 특정 슬립율 수준에서 지반-궤도 접지면의 전반적인 슬립변위 크기는 제안된 방법에 비해 기존방법이 더 크다. 따라서 지반추력이 슬립변위에 따라 증가하다가 특정 슬립변위 이상이 되면 최대지반추력에 수렴하는 hardening behavior를 보이는 경우, 기존방법을 통해 전체지반추력을 평가하면 제안된 방법에 비해 더 크게 산정된다(Fig. 7). 지반추력이 softening behavior를 보이는 경우에도 기존방법을 통해 산정된 전체지반추력이 제안된 방법에 비해 전반적으로 큰 경향을 보이지만, 슬립율이 약 0.05~0.06 이상인 경우엔 제안된 방법을 통해 평가한 전체지반추력이 기존방법에 비해 다소 큰 것으로 나타났다(Fig. 8). 이는 softening behavior를 보이는 경우 지반추력은 슬립변위에 따라 증가하다가 최대지반추력을 넘어서면 점차 감소하기 때문으로, 제안된 방법에서는 슬립율이 큰 경우에도 야지궤도차량 진행방향 기준으로 앞쪽은 최대지반추력을 넘어설 만큼의 슬립변위가 발생되지 않기 때문이다.
한편, 야지궤도차량의 구동가능여부는 전체지반추력-슬립율 관계에서 나타나는 전체 최대지반추력에 따라 결정된다(Wong, 1989). 각각의 야지궤도차량은 구동에 필요한 구동력의 크기가 결정되어 있는데, 야지궤도차량의 전체 최대지반추력 크기가 이보다 더 큰 경우에만 구동이 가능한 것이다. Fig. 7 및 Fig. 8에서 확인할 수 있듯이, 대상지반의 전단특성이 hardening behavior와 softening behavior를 보이는 경우 모두에서 기존방법이 야지궤도차량의 전체 최대지반추력을 더 크게 평가하는 것으로 나타나, 기존방법이 야지궤도차량의 구동성능을 과대평가할 수 있음을 확인하였다.
4.2 그라우저 형상비에 따른 야지궤도차량의 지반추력
그라우저의 길이와 간격의 비를 의미하는 형상비는 야지궤도차량의 구동성능에 지배적인 영향을 미친다(Park, 1996). 본 연구에서는 여섯 가지 형상비(1.3, 1.9, 2.5, 3.8, 4.8, 7.6)를 가지는 그라우저가 야지궤도차량에 부착된 경우 전체지반추력을 각각 산정하여, 그라우저 형상비가 야지궤도차량의 구동성능에 미치는 영향을 평가하였다. 앞서 언급한바와 같이, 기존방법은 그라우저 형상비에 따른 지반추력 차이를 고려할 수 없기 때문에 본 연구에서 제안된 방법만을 분석에 활용하였다. 그라우저 형상비가 야지궤도차량 전체지반추력에 미치는 영향을 보다 정량화하여 평가하기 위하여, Fig. 7 및 Fig. 8에 나타낸 그라우저가 부착된 경우의 전체 최대지반추력을 그라우저가 부착되지 않았을 때의 전체 최대지반추력으로 정규화 시켰다. Fig. 9의 (a), (b)는 대상지반의 전단특성이 각각 hardening behavior와 softening behavior를 보이는 경우의 정규화 된 최대지반추력(normalized maximum soil thrust)을 그라우저 형상비에 대해 나타낸 것이다.
Fig. 9에 나타낸바와 같이, 대상지반의 전단특성이 hardening behavior를 보이는 경우가 softening behavior인 경우에 비해 정규화 된 최대지반추력이 더 크게 평가되어, 전단강도가 작은 느슨한 사질토 지반(hardening behavior)에서 그라우저 부착에 따른 구동성능 개선효과가 더 큰 것으로 나타났다. 그라우저의 길이가 동일한 경우 형상비가 작을수록(즉, 그라우저 간격이 가까울수록) 야지궤도차량의 전체지반추력이 더 크게 증가하는 것으로 나타났다. 이는 그라우저 간격이 가까워지면 그라우저 사이에서 형성되는 지반블록의 크기가 작아지므로, 낮은 슬립율 수준에서도(즉, 작은 슬립변위만 발생되어도) 각각의 지반블록에서 큰 지반추력이 발현될 수 있었기 때문이다. 또한 그라우저의 길이가 증가하면 측면지반추력이 크게 발현되므로 전체지반추력 증가효과가 전반적으로 크게 나타났지만, 그라우저 형상비가 7.6인 경우에는 길이가 긴 그라우저의 전체지반추력 증가효과가 오히려 작았다. 이는 그라우저의 형상비와 길이가 동시에 크면 그라우저 사이 간격이 매우 멀어지므로, 간격 증가에 따른 전체지반추력 감소효과가 길이 증가에 따른 전체지반추력 증가효과를 상쇄하기 때문이다.
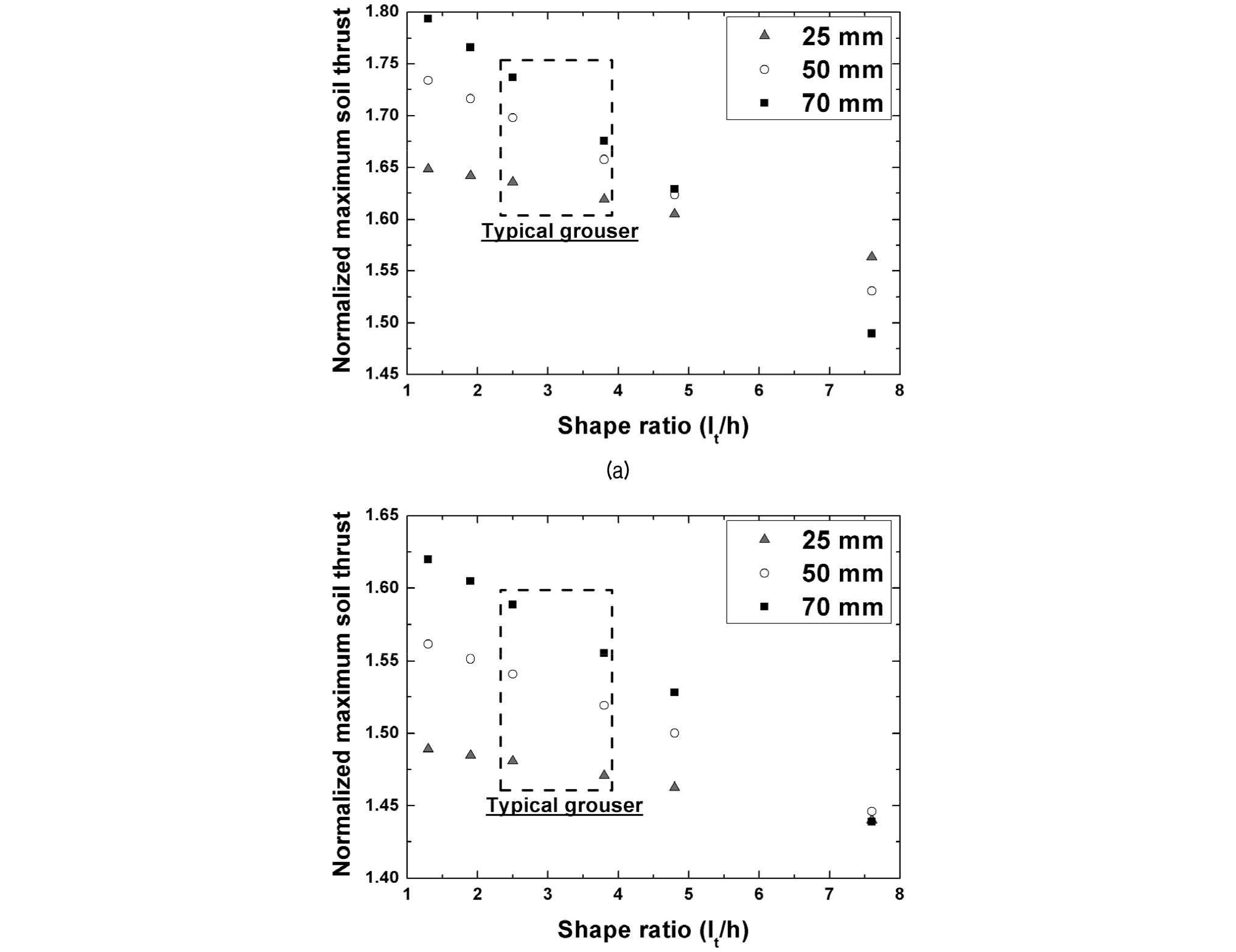
추가적으로, Fig. 9에 일반적으로 활용되는 상용 그라우저의 형상비(약 2.3~3.9)를 표시하였다. 그 결과, 상용 그라우저 형상비 범위 내에서는 그라우저의 길이가 증가하고 형상비가 감소할수록(즉, 간격이 가까울수록) 야지궤도차량의 전체지반추력이 더 크게 증가하는 것으로 나타났다. 다만, Shin et al.(2018)의 연구에 따르면 그라우저의 길이가 증가하고 간격이 가까워짐에 따라 인접 그라우저 사이에서 간섭효과(interference effect)가 발현되어 야지궤도차량의 전체지반추력이 감소하므로, 이와 같은 상반된 효과를 동시에 고려하기 위한 추가연구를 수행한다면 야지궤도차량에 적용할 수 있는 최적의 그라우저 형상을 제시할 수 있을 것으로 판단된다.
5. 결 론
본 연구에서는 지반-궤도 접지면의 전단메커니즘을 바탕으로 그라우저가 부착된 야지궤도차량의 지반추력을 평가하기 위한 새로운 방법을 제안하였다. 본 연구에서 제안된 방법 및 기존의 평가방법을 바탕으로 그라우저의 길이와 간격 및 형상비(=간격/길이)가 야지궤도차량의 지반추력에 미치는 영향을 평가였고, 다음과 같은 결론을 얻을 수 있었다.
(1) 그라우저가 부착됨에 따라 특정 슬립율 수준에서 발현되는 야지궤도차량의 전체지반추력이 증가하여 구동성능이 개선되는 것으로 나타났다. 이는 그라우저가 궤도저면과 지반 사이에서 발생하는 전단을 지반과 지반사이의 전단으로 전환시켜 전단력을 증가시키며, 궤도 측면에서 측면지반추력을 추가로 발현시킴으로서 지반추력을 증가시키는 효과가 있었기 때문이다.
(2) 그라우저 효과를 고려하여 평가된 야지궤도차량 전체지반추력-슬립율 관계는 기존방법과 제안된 방법에서 큰 차이를 보였으며, 기존방법이 전체 최대지반추력을 더 크게 평가하는 것으로 나타나 야지궤도차량의 구동성능을 과대평가할 수 있음을 확인하였다. 기존방법은 지반추력이 지반-궤도 접지면을 따라 모두 동일하다고 보는 반면 제안된 방법은 야지궤도차량 진행방향 기준으로 앞쪽은 지반추력이 작고 뒤로 갈수록 전단이 진행되어 지반추력이 커진다고 보므로, 특정 슬립율 수준에서 지반-궤도 접지면의 전반적인 지반추력의 크기는 제안된 방법에 비해 기존방법에서 더 크게 나타나기 때문이다.
(3) 그라우저의 길이가 증가하고 간격이 가까울수록 야지궤도차량의 전체지반추력이 더 크게 증가하는 것으로 나타났다. 다만, 그라우저 형상비가 7.6인 경우에는 예외적으로 그라우저 길이가 증가하면 전체지반추력 증가효과가 더 작았다. 이는 그라우저의 형상비와 길이가 동시에 크면 그라우저 사이 간격이 매우 멀어지므로, 간격 증가에 따른 전체지반추력 감소효과가 길이 증가에 따른 전체지반추력 증가효과를 상쇄하기 때문이다.
본 연구결과는 그라우저가 부착된 야지궤도차량의 구동성능을 평가하는데 활용될 수 있을 것이라 기대된다. 특히 일반적인 상용 그라우저 형상비 범위에서는 그라우저의 길이가 증가하고 간격이 가까울수록 전체지반추력이 커지므로, 형상비가 작은 그라우저를 통해 야지궤도차량의 구동성능을 크게 개선시킬 수 있을 것이라 판단된다. 다만, 앞서 언급한바와 같이 그라우저의 길이 증가 및 간격 감소에 따라 인접 그라우저 사이에서 간섭효과(interference effect)가 발현되어 지반추력이 감소할 수 있으므로, 이와 같은 상반된 효과를 동시에 고려하기 위한 추가 연구가 필요하다. 또한 야지궤도차량의 전체 지반추력을 측정하기 위한 모형시험 및 수치해석 연구를 수행하여 이론적 접근에 의해 도출된 본 연구결과를 보완 및 검증할 필요가 있을 것으로 판단된다.
