

1. 서 론
2. 인공지능(AI) 그라우팅 기술의 적용 원리
2.1 인공지능(AI) 그라우팅 시스템 및 장비
2.2 인공지능(AI) 딥러닝 CNN 알고리즘의 구현절차
2.3 실시간 주입유형분석 및 조치절차
3. 인공지능(AI) 기술과 기존기술의 주입성능 비교를 위한 현장시험 시공
3.1 그라우팅 시험시공 계획
3.2 인공지능(AI) 그라우팅 주입시공 챠트를 이용한 주입결과 분석
3.3 인공지능(AI) 주입차트와 시추코아를 이용한 P~Q~T 주상도 분석
3.4 인공지능(AI) 기술과 기존기술의 주입성능 비교 분석
4. 결 론
1. 서 론
그라우팅 기술은 지반의 안정성 확보를 위한 지반개량기술 중 하나로 현재 1세대부터 4세대까지 발전되어 현장에 적용되고 있다. 1세대 그라우팅 기술의 기본은 대상 지반에 과도한 그라우트 주입을 방지하기 위해 명확한 주입 완료 기준을 설정하는 데 있으며, 가장 일반적인 방법은 허용된 최대 압력을 기준으로 삼는 것이다. 주입 압력이 최대값에 도달한 후 5~10분 정도 그 상태를 유지한 뒤 주입을 중지하는 방식이 흔히 사용되며, 이때 압력은 최대치에 근접한 상태여야 한다. 최대 주입 체적 또한 주입 완료 기준으로 사용되며, 압력에 상관없이 종료 판단의 지표가 될 수 있다. 만약 예상보다 많은 주입량이 필요한 경우, 그라우트 배합의 물-시멘트비를 조절하여 대응하며, 최소 유입량도 최대 압력 및 체적과 함께 완료 기준으로 활용된다. 예를 들어 2분 이상 유입량이 거의 0에 가까울 경우 주입을 종료할 수 있다. 이러한 최대 압력, 최대 체적, 최소 유입량에 기반한 주입 완료 기준은 대부분의 현장에서 1세대 그라우팅 시공 시 널리 사용되고 있다(Hollmen, 2008). Lombard와 Deere(1993)가 제안한 GIN 방법(GIN-method)은 2세대 그라우팅 기술로 분류되며, 그 원리는 그라우팅 구간(또는 범위)에서 주입을 위해 사용된 에너지가 최종 주입 압력과 주입된 그라우트 체적의 곱에 비례한다는 개념에 기반하고 있다. 즉, 일정한 구간에서 그라우트를 주입할 때, 얼마나 많은 에너지가 사용되었는지를 평가하기 위해 압력과 체적을 함께 고려하며, 이 값을 통해 그라우팅 작업을 효과적으로 관리하고 제어할 수 있도록 한 방법이다. 3세대 그라우팅 기술로 분류되는 GT-method는 그라우트가 얼마나 멀리 침투하는지(침투길이)와 주입 시간 사이의 관계를 분석하여 주입을 언제 멈출지를 판단하는 기준을 정하는 이론 기반의 방법이다. 이 기술은 스웨덴의 Chalmers 공과대학교와 Royal 공과대학교에서 공동 개발되었으며(Hollmen, 2008), 보다 과학적인 분석을 통해 주입 효과를 예측하고 제어할 수 있게 한다. 이를 바탕으로 개발된 HK-method(Kim, 2012)는 시험 주입을 통해 결정된 최대·최소 주입압력 범위 내에서 주입을 제어하면서, 자동 그라우팅 시스템(AGS, automated grouting system)을 활용해 시공 중 4가지 주입 중단 모드를 실시간으로 적용하는 방식이다. 이를 통해 현장에서 자동으로 주입 중단 시점을 판단하고 적용할 수 있는 체계적인 시공 관리가 가능하도록 하였다. 4세대 그라우팅 시공관리 기술 중 하나인 RCG-method는 Kobayashi and Stille(2008)와 Rafi(2010)이 개발한 방법으로, 1~2차원 지반, 즉 암반에만 적용 가능한 주입량 예측 시스템이다. 이 방법의 강점은 예측된 주입량 곡선과 실제 주입량 곡선을 실시간으로 비교·조정하면서, 비용과 성능 면에서 최적의 시공 품질을 달성할 수 있다는 점이다. 한편, ROG-method는 Kim et al.(2014)이 개발한 4세대 기술로, 토사층이나 파쇄된 암반층처럼 복잡한 다차원 지반에 적용하기 위해 만들어졌다. 이 방법은 구면침투모델(Kim, 2005)을 기반으로 점도 변화와 동수경사 변화에 따른 폐색 효과를 반영한 ROG 알고리즘을 활용하여, 침투 범위와 주입 중단 시점을 예측할 수 있다. 특히, 현장에서 수집되는 데이터를 실시간으로 분석하고 역해석하여 최적 주입량(Q)을 계산하고, 이에 따라 자동으로 주입을 종료할 수 있는 고도화된 실시간 최적화 그라우팅 시공관리 기법이다. 그러나 이러한 기존 기술은 실시간 대응 및 자동화 제어에 한계가 여전히 존재한다.
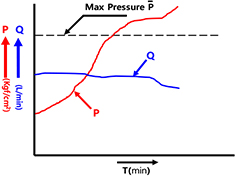
따라서, 본 연구에서는 이러한 주입차트 분석체계를 인공지능 기반으로 실시간 자동화한 차세대 시스템 개발 과정을 소개하였다. 본 시스템에서는 주입과 동시에 AI가 현재 주입 유형을 판단하고, 가장 유사한 표준 유형을 선택하여 분석을 수행한다. 판단된 유형에 따라 자동 제어펌프 장치를 활용해 주입압력과 유량을 실시간으로 조정함으로써, 시공 중 즉각적인 조치가 가능하도록 하였다. 한편, 기존의 그라우팅 시공기술은 시공 전 현장투수계수시험 및 루전시험 등을 통해 지반 특성을 평가하고, 주입 중에는 별도의 실시간 기술 적용 없이 시공을 진행하며, 시공 후 동일한 시험을 통해 효과를 분석하는 방식이었다. 이에 반해, 개선된 시스템은 주입 중 실시간으로 축적되는 P-Q-T 차트를 인공지능이 자동 분석하고 조치를 취할 수 있어, 주입 후에는 누적된 데이터를 기반으로 주입유형을 재분석함으로써 시공 품질을 보다 정량적이고 체계적으로 평가할 수 있다. 여기에서, P(pressure)는 주입압력, Q(quantity)는 주입유량, 그리고 T(time)은 주입시간을 나타낸다. 이를 정리하면 다음 표와 같다. 또한, 본 연구에서 제안하는 P-Q-T 주상도 분석기술은 향후 지반구조물 설계 시 그라우팅 데이터를 설계인자로 활용할 수 있는 가능성을 제시하며(Table 1), 이는 설계와 시공의 연계성을 강화하는 데 기여할 수 있을 것으로 판단된다. 해당 기술의 현장 적용성 평가를 위해 남해 지역 00도로의 설계 구간에 시범 적용되었으며, 그 성능을 기존 기술과 병행 적용하여 비교분석하였다. 주입성능의 비교는 주입량, 주입시간, 주입 전·후의 현장투수계수 변화를 정량적으로 분석하는 방식으로 수행되었으며, 이를 통해 개선된 기술의 효용성을 실증적으로 검토하였다.
Table 1.
Comparison of improved and existing technologies
2. 인공지능(AI) 그라우팅 기술의 적용 원리
2.1 인공지능(AI) 그라우팅 시스템 및 장비
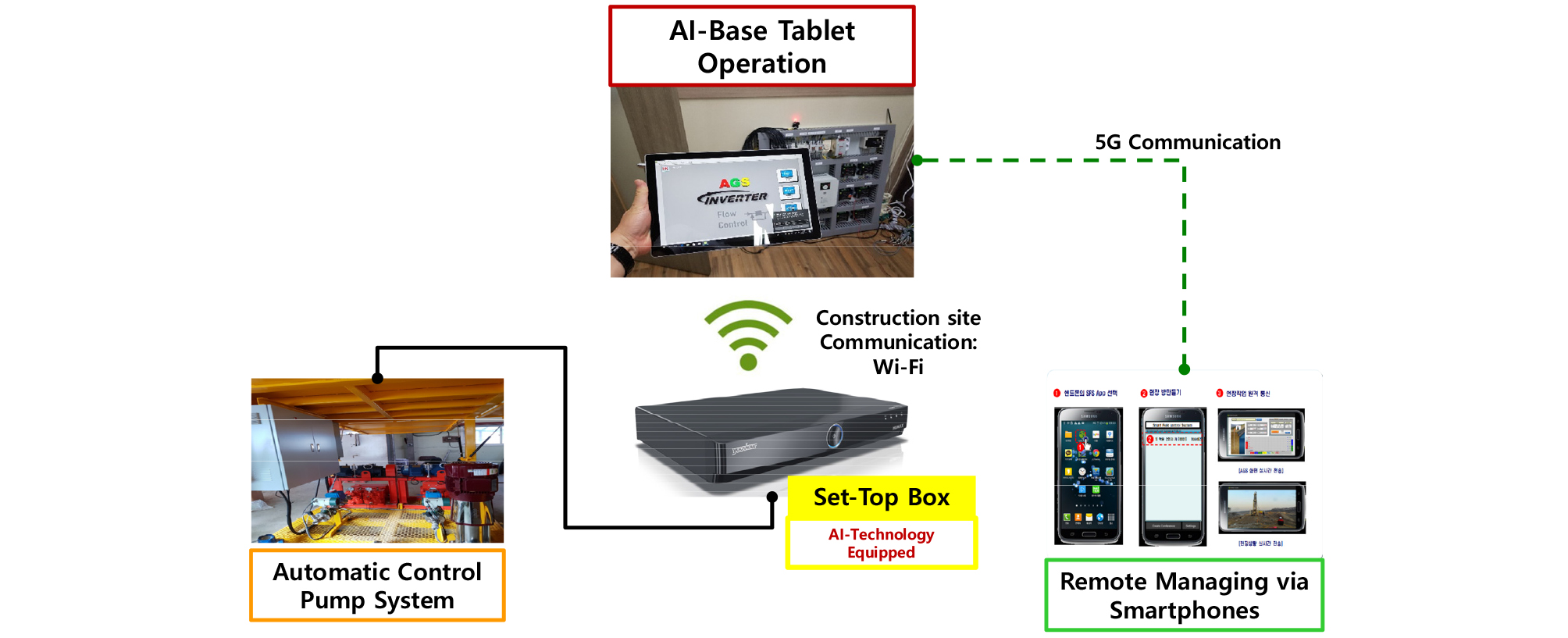
AI(인공지능) 기반 그라우팅 시공 자동화 기술의 구현을 위해서는 인공지능 분석이 가능한 서버(예: 셋톱박스 등), 태블릿, 노트북, PC, 스마트폰 등 다양한 디지털 장치와 함께, 자동 압력 제어 기능을 갖춘 펌프 장비 및 인공지능 알고리즘이 통합된 분석·평가·조치 주입 제어 프로그램(시스템)의 개발이 필수적이다. 제안된 시스템은 현장에서는 태블릿, 노트북, PC 등의 장치를 통해 운영되며, 원격지에서는 스마트폰을 활용한 운영이 가능하도록 구성되었다. 이러한 구성은 시공 품질의 향상, 장비 간 호환성 확보, 시공 편의성 증대 및 경제성 향상에 기여하는 고도화된 시스템 및 장비로 구성되며, 그 구체적인 구성은 Fig. 1에 도시하였다.
2.2 인공지능(AI) 딥러닝 CNN 알고리즘의 구현절차
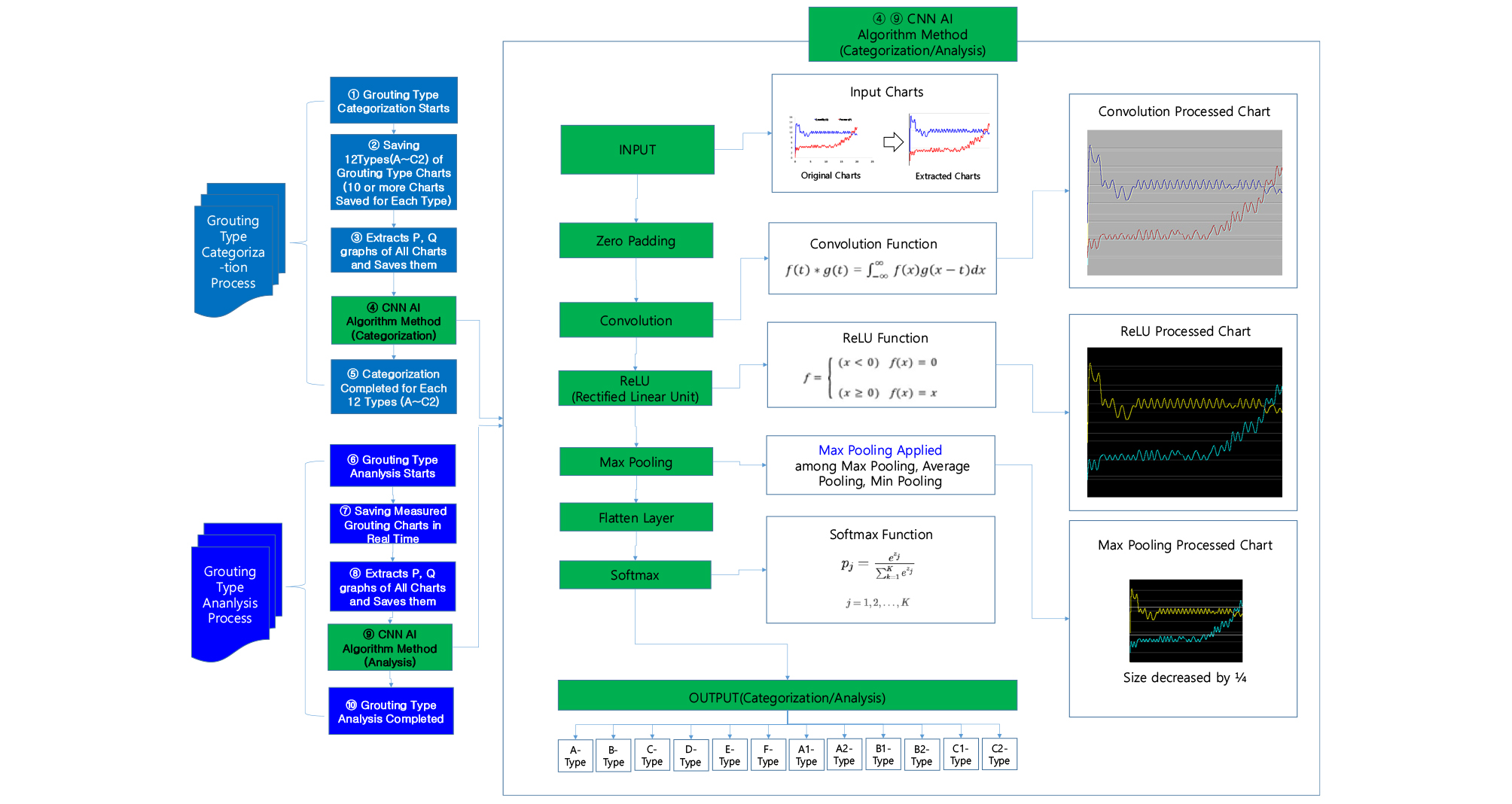
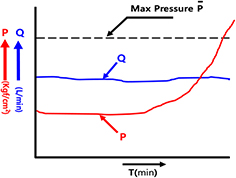
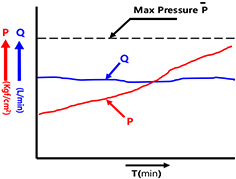
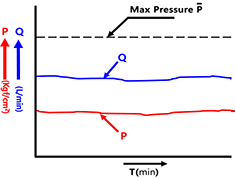
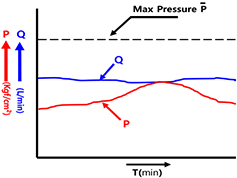
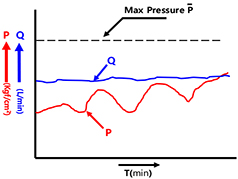
본 연구에 적용된 개선된 자동화 그라우팅 시스템은 AI 기반의 주입 기술을 포함한 차세대 지반개량 기술로, 그라우팅 시공 중 실시간으로 주입유형을 자동 분류하고 분석하는 기능을 갖는다. 기존의 연구들(Shimada et al., 1992; Mistry, 1988)에 따르면, 그라우팅 시공 시 필수적으로 기록되는 압력-유량-시간(P-Q-T) 차트를 이용하여 주입유형을 분류할 수 있으며, 토사층의 경우 6가지 유형(A형, B형, C형, D형, E형, F형), 암반층의 경우 6가지 유형(A1형, A2형, B1형, B2형, C1형, C2형)으로 총 12가지 표준 유형이 제안되어 있다. 본 연구에서는 인공지능(Artificial Intelligence, AI)의 딥러닝 기술 중 합성곱 신경망(Convolutional Neural Network, CNN) 알고리즘을 활용하여 그라우팅 주입유형을 분석하고자 하였으며, 이를 위해 두 가지 주요 절차인 주입유형 분류 과정과 주입유형 분석 과정을 구현하였다(Figure 2). AI 기반 주입유형 분석은 실제 주입과 동시에 실시간으로 수행되며, 주입 데이터를 바탕으로 12가지 유형 중 가장 유사한 유형을 자동 선택한다. 또한, 인공지능 기반의 실시간 조치 기법은 자동 제어 펌프 장치를 활용하여 주입압력 및 유량을 적절히 조절함으로써 대응이 가능하다. 주입유형 분류는 다섯 단계로 구성된다. 분류 시작 단계인 주입유형 분류 프로세스 개시로부터 12가지(A~C2형) 유형에 대해 각 10개 이상의 주입 차트를 저장하는 차트 데이터 수집과 수집된 차트로부터 유량 및 압력 그래프만을 추출하여 저장하는 특성 데이터 추출 및 CNN 알고리즘을 적용하여 수집된 데이터를 학습시킨 후, 유형별 분류 수행하는 AI 모델 학습 및 분류 그리고 학습된 모델을 통해 입력 데이터를 12가지 주입유형 중 하나로 분류하게 되는 분류 완료로 이루어진다. 주입유형 분석 역시 다섯 단계로 수행되는데, 실시간 분석 프로세스 개시를 포함한 분석 시작 단계에서 주입과 동시에 측정된 주입 차트를 저장하는 차트 데이터 저장 그리고 저장된 차트에서 유량 및 압력 데이터만을 추출하여 저장하는 특성 데이터 추출 및 CNN 알고리즘을 적용하여 저장된 데이터를 분석하는 AI 분석을 수행하는 단계로부터 12가지 유형 중 가장 유사한 유형을 자동으로 판단하여 결과 도출하는 분석 결과 도출로 이루어져 있다.
이와 같이 본 연구는 CNN 기반의 AI 알고리즘을 활용하여 기존의 경험적 판단에 의존하던 그라우팅 주입유형 분류 및 분석을 자동화함으로써, 실시간 시공 품질 관리 및 대응을 가능하게 하는 기술적 진보를 제시한다.
2.3 실시간 주입유형분석 및 조치절차
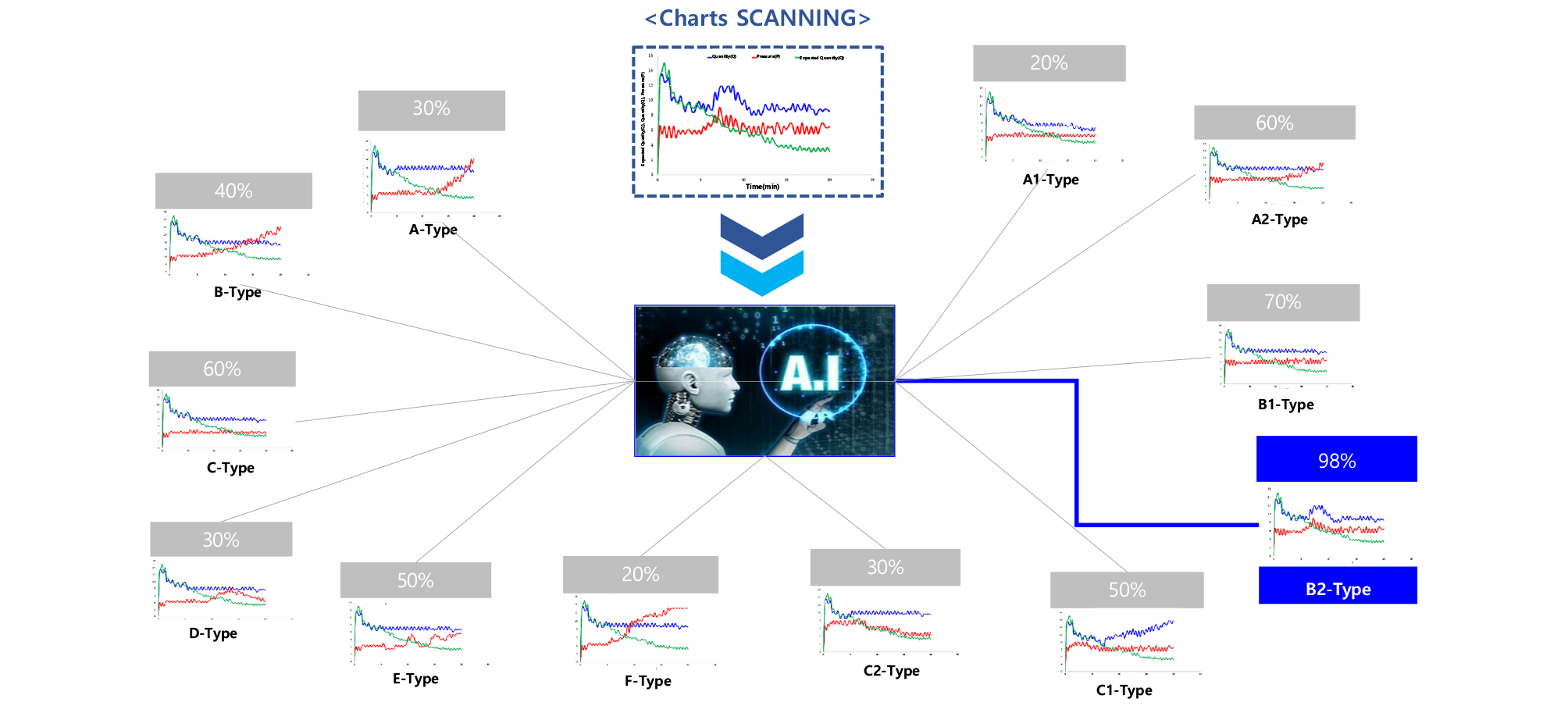
본 연구에서는 인공지능(AI)을 활용한 주입 유형 분석 및 실시간 조치 기법을 제안한다. 제안된 시스템은 주입 작업과 동시에 시공 데이터를 실시간으로 수집하고 분석하여, 총 12종의 표준 주입 유형(Standard Grouting Types) 중 입력 데이터와 가장 유사한 유형을 자동으로 분류한다. 이 표준 유형은 지반의 특성에 따라 토사층(granular soils) 6종과 암반층(rock mass) 6종으로 구분되며, 시스템은 주입 위치의 지질 조건을 고려하여 적절한 범주 내에서 판단을 수행한다. 분석에는 시계열 기반의 주입압력, 주입유량 등의 데이터를 입력으로 하며, 딥러닝 기반 유사도 분석을 통해 실시간으로 주입 유형을 판별하고, 가장 유사도가 높은 유형이 최종 선택된다(Fig. 3).
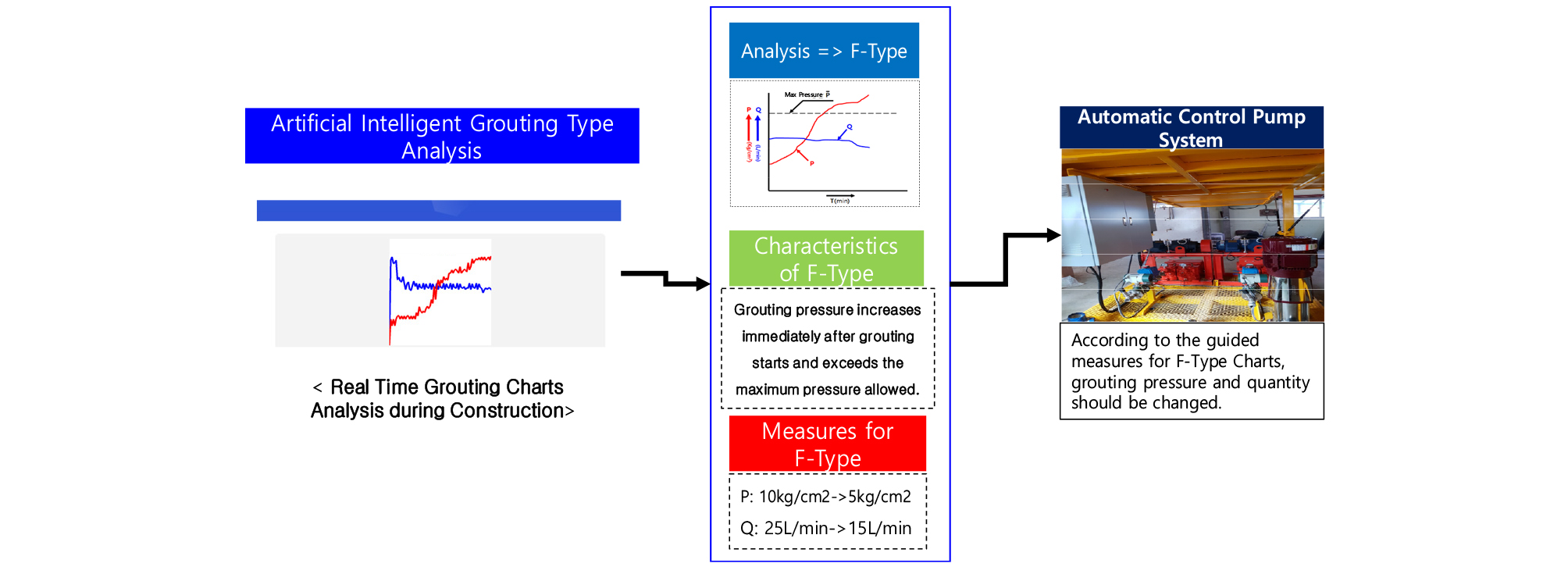
이와 함께, 본 연구는 인공지능 기반 실시간 조치 방법을 통해 분석 결과에 대응하는 자동화된 주입 제어를 실현하였다. 자동 제어 펌프 장치(Auto-Controlled Pumping Unit)를 이용하여, 판별된 주입 유형에 따라 주입압력과 주입유량이 자동으로 조정되며, 인공지능이 도출한 최적의 주입 조건을 실시간으로 적용한다. 이러한 자동화된 조치 기술은 기존의 작업자 중심 제어 방식에서 발생할 수 있는 주관성 및 반응 지연 문제를 최소화하고, 주입 효율성과 품질을 크게 향상시킨다. Fig. 4는 제안된 인공지능 기반 실시간 주입 유형 분석 결과를 기반으로 작동하는 조치 기술의 전체 흐름을 절차도로 나타낸 것이다. 이 절차도는 데이터 수집, 주입 유형 분류, 조건 설정, 자동 조치의 4단계로 구성되며, 향후 주입공법의 스마트화를 위한 핵심 기술로 활용될 수 있을 것으로 기대된다.
3. 인공지능(AI) 기술과 기존기술의 주입성능 비교를 위한 현장시험 시공
3.1 그라우팅 시험시공 계획
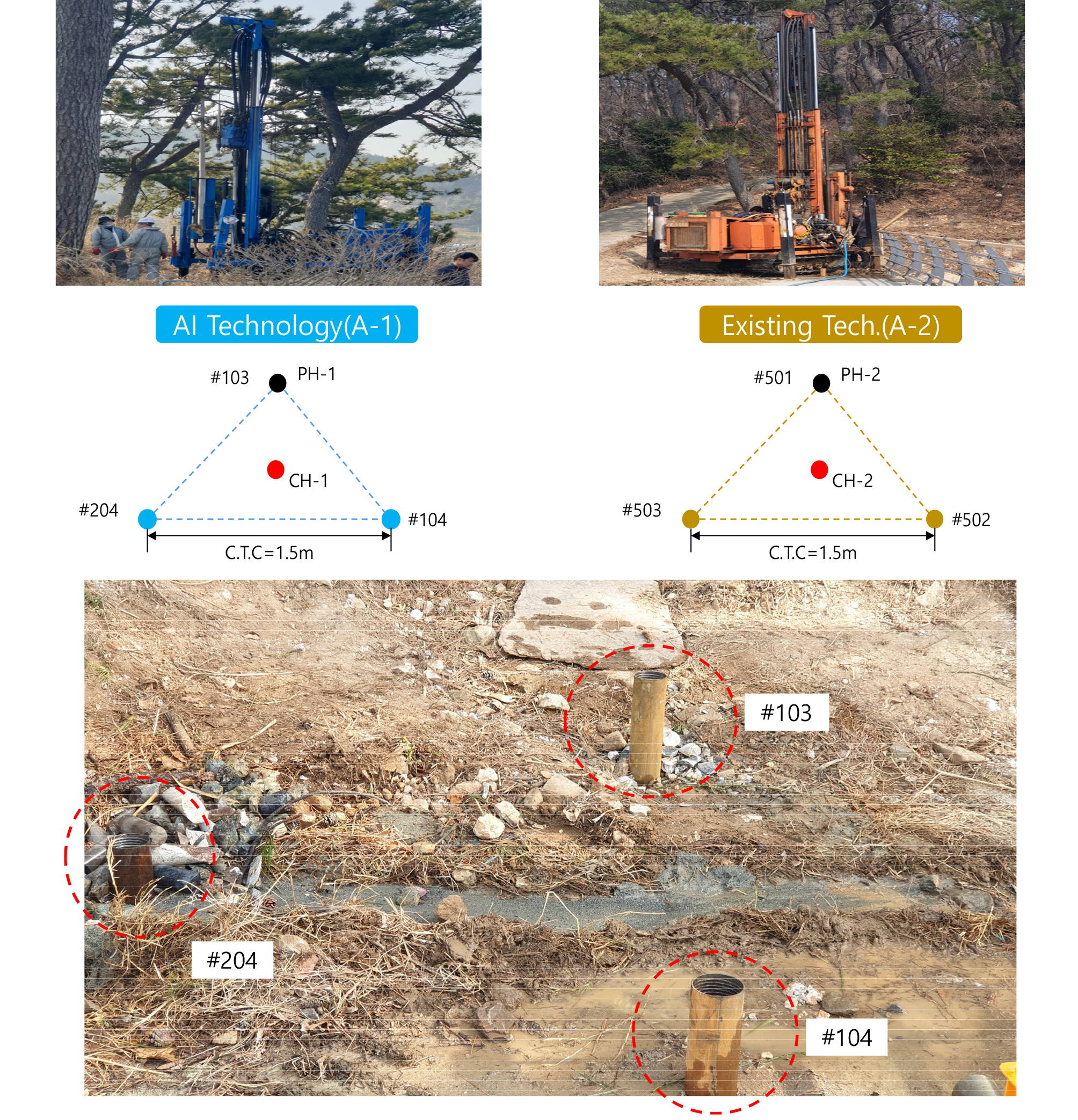
본 연구의 인공지능 기반 주입 유형 분석 및 자동 조치 기술의 현장 적용성 평가를 위해, 남해 지역 소재의 00도로 설계 구간을 시험 대상지로 선정하였다. 시험 시공은 대상 구간 내 지반 조건, 공간 제약 및 시공 접근성 등 제반 여건을 고려하여 계획되었으며, 실제 적용은 Fig. 5와 같이 정삼각형 배치 형태로 구성되었다. 시험구간 간의 간섭을 최소화하고, 주입 반응 특성의 정량적 비교를 용이하게 하기 위하여 공간적으로 설계하였다. 모든 공의 번호 간 거리는 각 1.5m이며, A-1은 육지쪽에 가깝게 위치하며 A-2는 바다쪽에 가깝게 위치한다. 또한, A-1과 A-2의 거리는 약 10m 정도로 시험 구간의 간섭을 최소화하였다. 시험 시공은 인공지능 기반 주입 기술이 적용된 구간과 기존 기술을 적용한 대조 구간으로 구분하여 수행되었으며, 두 구간 모두 동일한 조건 하에서 동등한 시험물량을 확보하였다. 각 시험구간에는 1공의 조사공(pilot hole), 3공의 주입공(grouting hole), 1공의 확인공(check hole)을 시공하여, 주입 전 조사, 주입 작업, 주입 후 확인까지 전 과정을 포함하는 표준화된 시공 절차를 적용하였다. 이와 같은 실규모 시험 시공을 통해, 제안된 인공지능 기반 기술과 기존 기술 간의 성능 비교 및 적용 가능성 평가가 가능하도록 하였으며, 추후 실제 공정에의 확장 적용을 위한 기초자료로 활용하고자 하였다.
3.2 인공지능(AI) 그라우팅 주입시공 챠트를 이용한 주입결과 분석
기존의 그라우팅 시공에서는 주입 상태를 실시간으로 평가할 수 있는 체계가 거의 부재하여, 작업자는 주로 경험적 판단이나 사후 결과에 의존할 수밖에 없었다. 이에 반해, 본 연구에서 개발한 인공지능(AI) 기반 그라우팅 기술은 주입 중 발생하는 데이터를 실시간으로 분석함으로써, 주입 유형에 대한 실시간 판별뿐만 아니라, 주입 상태에 따라 주입압력 및 주입량을 자동으로 조정하는 피드백 기반의 조치가 가능함을 확인하였다. 실제 적용 사례로서, 인공지능 기반 제어 시스템이 적용된 시험구간 A-1의 103, 104, 204번 주입공에 대해 단계별 주입 결과를 분석하였다. 인공지능 기반 그라우팅의 주입 상태를 정량적으로 평가하기 위해, 토사층(granular soils)에서는 Shimada et al.(1992)이 제안한 주입 유형 특성 및 판정 기준을, 암반층(rock mass)에서는 Mistry(1988)의 기준을 각각 참조하였다. 이러한 주입유형 특성표는 주입압력, 주입량, 시간 변화 양상 등을 기반으로 주입 상태를 체계적으로 분류할 수 있도록 구성되어 있으며, 본 연구에서는 이를 Table 2 및 Table 3에 정리하여 활용하였다.
103번 공에서는
1단계(Step 1): 암반 상태가 양호하여 주입이 불가능하였고,
2단계(Step 2): D → B1 → C2 → C1 → X의 순서로 주입이 진행되었으며,
3단계(Step 3): C → A2 → B2 → X의 순서로 주입이 이루어졌다.
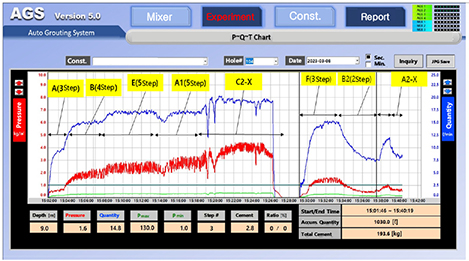
104번 공에서는
1단계: A → B → E → A1 순으로,
2단계: F → B2,
3단계: A2 → X 순으로 주입이 진행되었다.
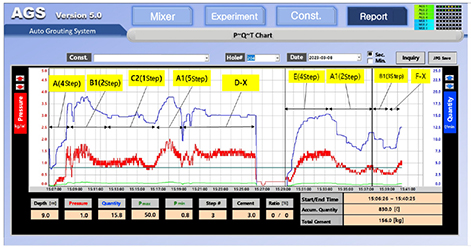
204번 공의 경우에는
1단계: A → B1 → C2 → A1 → D → X,
2단계: E → A1,
3단계: B1 → F → X의 순서로 주입이 이루어졌다.
Table 2.
A~F type injection type characteristics and decision table (Shimada, 1992)
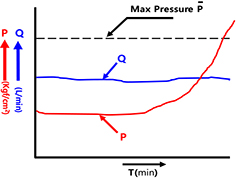
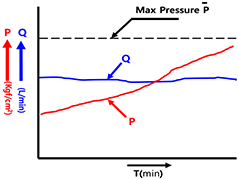
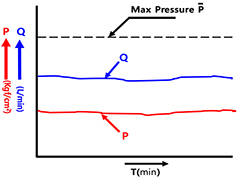
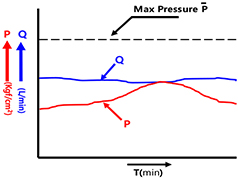
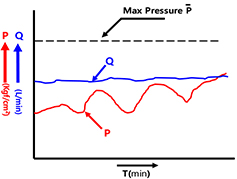
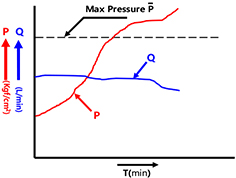
Table 3.
A1~C2 type injection type characteristics and decision table (Mistry, 1988)
이와 같은 주입 이력은 인공지능 시스템이 실시간으로 각 위치의 주입 특성을 분석하고, 시간 경과에 따라 동적으로 주입 경로 및 방식이 최적화됨을 보여준다. 특히 주입 초기에는 D, A2, F, C2 등 일부 구간에서 주입 상태가 미흡하였으나, 반복적인 단계별 분석 및 조치를 통해 최종적으로는 모두 X형 주입유형으로 수렴하였다. X형은 A유형과 유사하게 주입 효과가 균일하고 이상적인 주입 분포를 나타내는 패턴으로, 본 시스템의 자동 조치 기능이 그라우팅 품질 향상에 실질적으로 기여함을 확인할 수 있다(Table 4 참조). 이러한 결과는 인공지능 기반 그라우팅 기술이 현장 적용에 있어 실시간 적응성과 품질 일관성을 동시에 확보할 수 있는 혁신적인 해법임을 실증적으로 입증한 사례라 할 수 있다.
Table 4.
Artificial Intelligence (AI) grouting injection construction results table
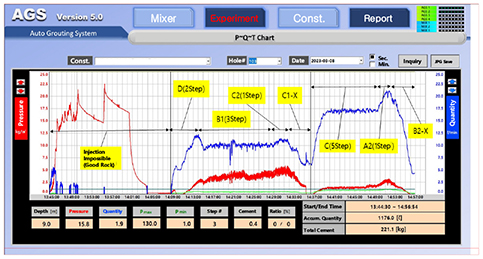
3.3 인공지능(AI) 주입차트와 시추코아를 이용한 P~Q~T 주상도 분석
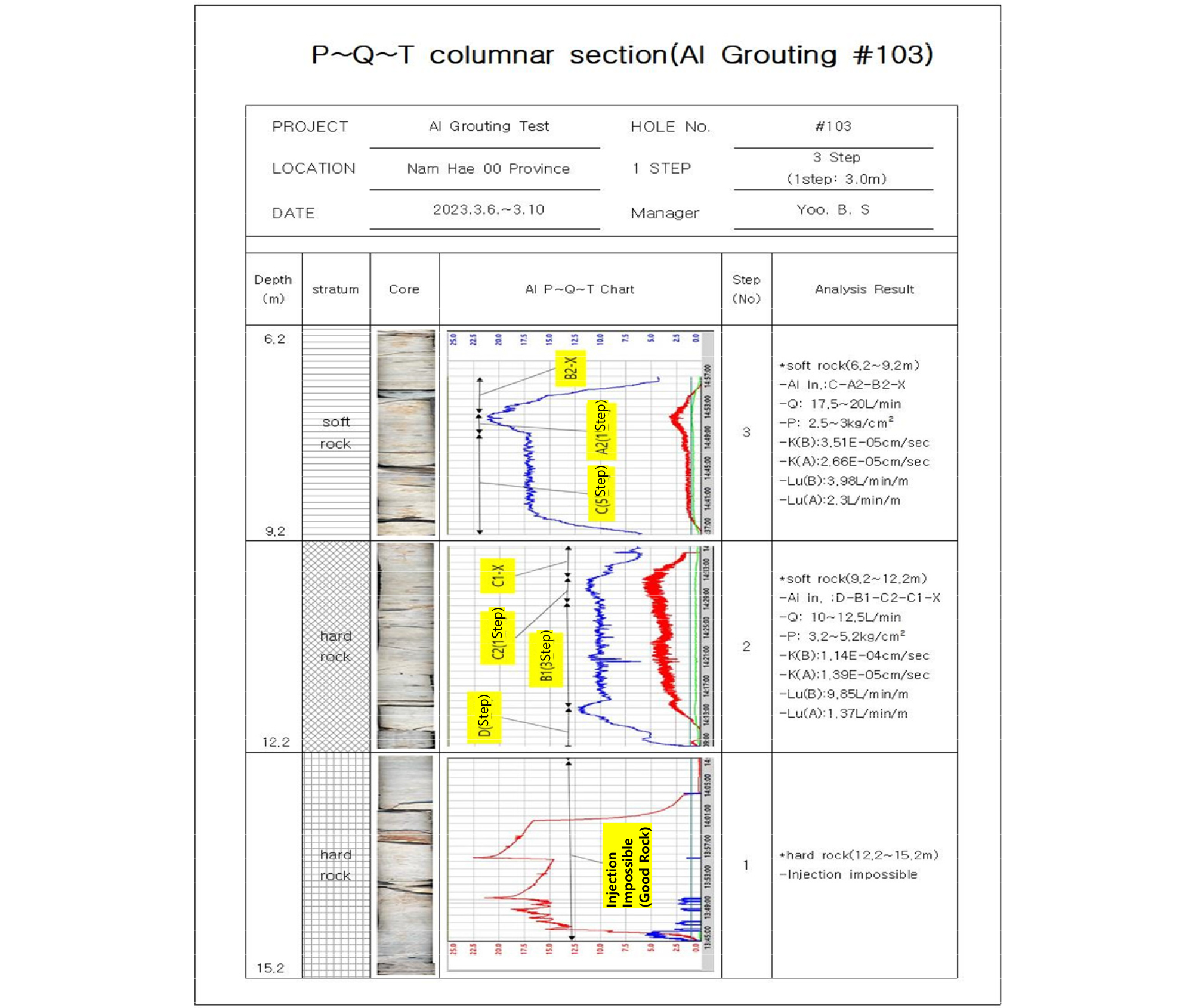
P–Q–T 주상도 분석은 시공 중 발생하는 물리적 데이터(주입압력, 유량, 주입유형)와 지반 투수특성의 상관관계를 심층적으로 해석할 수 있게 해주며, 특히 동일 공내 단계별 심도 차이에 따른 주입 반응성 변화를 정량적으로 비교할 수 있다는 점에서 기술적 유의미성을 갖는다. 본 기술은 향후 지반구조물의 설계단계에서 시험 그라우팅 데이터를 기반으로 한 설계인자 추정 및 시공 전 예측 모델링에 실질적인 참조 자료로 활용될 수 있을 것으로 기대된다. 본 연구에서 제안하는 P–Q–T 주상도(Pumping–Quantity–Time Log) 기반 분석기법은 인공지능(AI) 기반 주입 시스템의 해석 능력을 심화 검증하기 위한 정밀 해석 도구로 활용되었으며, 그 적용성은 A-1 시험구간 내 103번 주입공을 대상으로 실증하였다. 103번공의 Step 1 구간(심도 12.2~15.2m)은 경암층으로, 암반 상태가 매우 양호하여 주입이 불가한 것으로 나타났다. 이는 기존 주입성 판정기준에서도 매우 낮은 투수성을 나타내는 구간으로 해석된다.
Step 2 구간(심도 9.212.2m)은 연암층으로 구성되어 있으며, 인공지능 기반 주입 유형 분석 결과, 주입 경로는 D → B1 → C2 → C1 → X의 순서로 도출되었다. 주입작업은 주입속도 1012.5L/min, 주입압력 3.2~5.2kg/cm2 조건에서 수행되었다. 주입 전후의 투수계수(K)는 각각 K(B) = 1.14×10-4cm/sec, K(A) = 1.39×10-5cm/sec로 분석되었으며, 단위길이당 주입량(Lu)은 Lu(B) = 9.85L/min/m, Lu(A) = 1.37L/min/m으로 측정되었다. Step 3 구간(심도 6.29.2m) 또한 연암층으로 확인되었으며, AI 기반 주입 유형은 C → A2 → B2 → X로 분석되었다. 주입속도는 17.520L/min, 주입압력은 2.5~3.0kg/cm2였으며, 투수계수는 K(B) = 3.51×10-5cm/sec, K(A) = 2.66×10-5cm/sec, 단위길이당 주입량은 Lu(B) = 3.98L/min/m, Lu(A) = 2.30L/min/m으로 각각 분석되었다.
3.4 인공지능(AI) 기술과 기존기술의 주입성능 비교 분석
인공지능(AI) 기반 그라우팅 기술의 성능을 정량적으로 평가하기 위하여, 동일 조건 하에서 수행된 기존기술(A-2)과의 비교 분석을 실시하였다. 그 첫 번째 비교 항목으로, 총 주입량 및 총 주입시간을 주요 지표로 설정하여 분석하였다. 시험 결과, 인공지능 기술이 적용된 A-1 구간의 총 주입량은 3,036L(570.7kg), 총 주입시간은 145분으로 측정되었다. 반면, 기존 기술이 적용된 A-2 구간의 총 주입량은 2,736L(514.4kg), 총 주입시간은 100분으로 나타났다. 두 공법 간의 비교 결과, 기존기술(A-2)은 인공지능 기술(A-1) 대비 주입량이 300L(56.3kg) 적고, 주입시간도 45분 짧게 나타났다. 표면적으로는 기존기술이 시간 효율 측면에서 우수한 것처럼 보일 수 있으나, 주입 성능의 본질은 지반 조건에 따라 충분한 주입량 확보를 통해 균일하고 안정된 지반개량 효과를 달성하는 데 있다. 이러한 관점에서 볼 때, 인공지능 기술은 동일한 조건 하에서 더 많은 주입량과 더 오랜 시간 동안 정밀하게 제어된 주입작업을 수행하였으며, 이는 주입 상태가 보다 양호하였음을 나타낸다. 따라서, 본 비교에서는 주입량 및 주입 지속성을 기준으로 인공지능 기반 주입기술이 기존 기술 대비 상대적으로 우수한 주입상태와 공법 효율성을 확보하고 있는 것으로 판단된다(Table 5).
Table 5.
Comparative analysis of injection volume and injection time
두 번째로, 인공지능 기술과 기존기술의 성능을 비교분석하기 위해 현장투수계수값을 측정하였다. 인공지능 기술(A-1)의 주입 전 평균 현장투수계수값은 6.54×10-5cm/sec에서 주입후 1.93×10-5cm/sec로 측정되었으며, 기존기술(A-2)의 주입전 평균 현장투수계수값은 6.98×10-5cm/sec에서 주입 후 6.21×10-5cm/sec로 측정되었다. 인공지능기술(A-1)이 기존기술(A-2)보다 상대적으로 주입효과가 우수한 것으로 분석되었다(Table 6).
Table 6.
Comparative analysis of field pitcher coefficient
성능 비교의 두 번째 항목으로, 인공지능 기반 기술과 기존 기술 간의 주입 전·후 현장투수계수(in-situ permeability coefficient) 변화를 정량적으로 분석하였다. 투수계수는 지반의 차수 성능 및 주입 효과를 직접적으로 평가할 수 있는 핵심 지표로, 본 연구에서는 각 구간별 평균값을 기준으로 비교하였다. 인공지능 기술이 적용된 A-1 구간의 경우, 주입 전 평균 투수계수는 6.54×10-5cm/sec로 측정되었으며, 주입 후에는 1.93×10-5cm/sec로 약 70.5% 감소하였다. 이는 주입을 통해 지반의 투수성이 효과적으로 저하되었음을 의미한다. 반면, 기존 기술이 적용된 A-2 구간의 경우, 주입 전 평균 투수계수는 6.98×10-5cm/sec, 주입 후는 6.21×10-5cm/sec로 감소율이 약 11.0%에 불과하였다. 동일한 지반 조건 및 시험구성 하에서의 비교 결과, 인공지능 기술(A-1)은 기존 기술(A-2)에 비해 현저히 높은 차수 성능 개선 효과를 나타낸 것으로 분석된다. 이러한 결과는 인공지능 기반 주입 시스템이 실시간 유형 분석 및 주입 조절 기능을 통해 지반 조건에 보다 정밀하게 대응할 수 있으며, 결과적으로 보다 효과적인 주입성과를 달성할 수 있음을 입증한다(Table 6).
4. 결 론
본 연구는 인공지능(AI) 기반의 분석 및 제어 기술을 중심으로 구성된 개선형 자동화 그라우팅 관리시스템의 실효성과 적용 가능성을 검토하고자, 동일한 현장 조건에서 기존 기술과 비교시험을 수행하였다. 이를 통해 인공지능 기술의 현장 적용성, 주입 성능, 해석 정밀도 및 차수 효과에 대한 정량적 평가를 수행하였으며, 다음과 같은 결론을 도출하였다.
AI 기반 자동 제어 시스템 구성: 본 기술 구현을 위해 인공지능 분석용 장치(서버, 태블릿, 노트북, 스마트폰 등), 자동 압력 제어 펌프 장비, 그리고 딥러닝 CNN 알고리즘을 기반으로 한 실시간 분석·평가·조치 제어 프로그램이 개발되었다. 이를 통해 주입 중 주입유형을 실시간으로 분석하고, 이에 따른 자동 제어가 가능한 차세대 지능형 그라우팅 기술 체계를 구축하였다.
실시간 주입상태 판단 및 조치 기능: 기존 기술에서는 주입 상태를 정량적으로 실시간 판단하기 어려웠던 반면, 본 기술은 실시간 주입유형 분석을 통해 주입 상태를 모니터링하고, 주입압력과 유량을 자동 조정할 수 있는 제어 기능을 성공적으로 구현하였다. 특히 AI 기술(A-1)에서는 초기 단계에서 주입상태가 불량했던 구간(D, A2, F, C2 등)도 최종적으로 이상적인 X형 주입유형으로 조치됨을 확인하였다.
주입량 및 주입시간 비교 분석: 인공지능 기술(A-1)의 총 주입량은 3,036L(570.7kg), 주입시간은 145분으로 측정되었으며, 기존 기술(A-2)은 2,736L(514.4kg), 100분으로 나타났다. 인공지능 기술이 상대적으로 많은 주입량과 정밀한 제어를 통해 더 긴 시간 동안 균일하게 주입됨으로써 주입 품질 향상을 달성하였다.
투수계수 변화 분석: AI 기술의 주입 전후 평균 현장투수계수는 6.54×10-5cm/sec → 1.93×10-5cm/sec로 약 70% 감소한 반면, 기존 기술은 6.98×10-5cm/sec → 6.21×10-5cm/sec로 변화하여 개선율이 낮았다. 이는 인공지능 기술이 지반 차수 성능 개선 측면에서도 유의미한 효과를 가지는 것으로 분석되었다.
P–Q–T 주상도 개발 및 활용성 검증: 본 연구에서는 인공지능 주입차트와 시추코어 정보를 통합한 P–Q–T 주상도 분석 기법을 개발하고, 103번 주입공에 적용하였다. 해당 기법은 주입 특성과 지반조건의 상관관계를 정량적으로 해석하는 데 유용하며, 향후 지반구조물 설계단계에서 시험 그라우팅 자료 기반의 설계 인자 도출을 위한 참조 도구로 활용 가능성이 높다.
기술 종합 평가 및 적용성: 본 연구의 비교시험 결과를 종합해볼 때, 인공지능 기술을 포함한 자동화 그라우팅 관리시스템은 기존 기술 대비 정량적 성능과 제어 효율성 측면에서 우수한 결과를 보였으며, 몇 가지 보완 사항을 개선할 경우 다양한 실규모 그라우팅 현장에의 적용 가능성을 충분히 확인하였다.
