

1. 서 론
2. 지능형 다짐값과 일점품질시험 결과 간 상관성 분석
3. 현장시험 방법 및 조건
3.1 현장시험 개요
3.2 성토재료
3.3 지능형 다짐값 및 일점품질시험
4. 현장시험 결과 및 분석
4.1 다짐횟수에 따른 다짐품질 지표 변화 분석
4.2 CMV와 일점품질시험 결과 간 상관성 분석
5. 결 론
1. 서 론
다짐(compaction)은 흙에 외력을 가해 간극 내의 공기를 제거하고 입자 간 거리를 좁히는 과정으로, 흙의 밀도와 강성을 증가시켜 공학적 특성을 향상시키는 데 목적이 있다(Das and Sivakugan, 2017). 다짐은 지반구조물 시공 과정에서 필수적인 절차이며, 적절한 다짐품질 관리는 지반구조물의 성능을 향상시키고 유지관리 비용을 절감하는 데 매우 중요하다. 일반적으로 다짐이 잘 이루어진 흙은 충분한 밀도와 강성을 확보하여 사용하중(service load) 하에서 침하가 최소화되는 지반으로 정의된다(Ganju et al., 2018).
지난 수십 년 동안 미국 각 주의 도로국(Department of Transportation, DOT)과 한국도로공사는 흙의 밀도 또는 강성을 측정하는 일점품질시험(location-specific in-situ test)을 통해 다짐품질 관리를 수행해왔다(Baek et al., 2024). 밀도 기반 시험으로는 방사성동위원소 게이지(nuclear gauge)와 모래치환에 의한 들밀도시험이 대표적이며, 강성 기반 시험으로는 soil stiffness gauge(SSG), 평판재하시험(plate load test, PLT), falling weight deflectometer(FWD), lightweight deflectometer(LWD), 동적콘관입시험(dynamic cone penetration, DCP) 등이 있다. 국내 쌓기 표준시방서(KCS 11 20 20, 2023)에서는 들밀도시험 또는 평판재하시험을 통해 다짐품질을 관리하도록 규정하고 있으며, 이들 시험을 수행하기 어려운 경우에 한하여 LWD 시험 혹은 DCP 시험을 대체 방법으로 적용할 수 있도록 명시하고 있다.
이러한 일점품질시험은 흙의 밀도나 강성을 직접적으로 측정할 수 있다는 장점과 오랜 기간 축적된 활용 경험이 있다는 점에서 신뢰성이 높지만, 다음과 같은 한계가 존재한다: (1) 시험이 특정 지점에서만 수행되기 때문에 해당 결과가 전체 현장의 품질을 대표하기 어렵고(Liu et al., 2016), (2) 시공과 품질시험이 분리되어 수행됨에 따라 시험을 위한 장비 대기시간이 발생하여 생산성이 저하되며(Baek et al., 2020), (3) 시험과 기록이 작업자의 수작업으로 이루어져 데이터 오류나 누락의 위험이 존재하고 불필요한 문서작업이 반복되어 생산성이 저하된다(Zhang et al., 2020).
이러한 한계를 극복하기 위해 최근 지능형 다짐(Intelligent Compaction, IC) 기술이 주목받고 있다. 지능형 다짐은 진동롤러에 고정밀 GPS와 가속도계를 부착하여 다짐 과정에서 롤러의 동적 반응을 실시간으로 계측하는 기술이다(Sandstrom and Pettersson, 2004). 가속도계로부터 측정된 신호를 분석해 지반의 동적 반발특성을 반영하는 지능형 다짐값(Intelligent Compaction Measurement Value, ICMV)을 산정하고 이를 GPS 위치정보와 연계하면, 다짐품질을 실시간-연속적인 디지털 데이터 형태로 획득할 수 있다.
이러한 기술적 이점을 바탕으로 Trimble, Leica, Caterpillar, Sakai, Ammann, Bomag 등 글로벌 제조사뿐 아니라 국내에서도 한국건설기술연구원이 “스마트건설기술개발사업(2020~2025)”을 통해 지능형 다짐 시스템을 개발했다. 각 시스템은 서로 다른 이론적 기반에 따라 다양한 지능형 다짐값을 사용하고 있다. 예를 들어 Trimble, Leica, Geodynamik, 한국건설기술연구원은 compactionmeter value(CMV)를, Sakai는 compaction control value (CCV)를, Ammann은 soil stiffness(kB)를, Bomag은 vibration modulus(Evib)를 품질지표로 사용한다(Baek et al., 2025). 이에 발맞춰 오스트리아 도로국(RVS 08.03.02, 1999), 국제지반공학회(ISSMGE, 2005), 미국 연방도로청(FHWA, 2014), 국토교통부(KCS 10 20 70, 2021) 등은 지능형 다짐값을 기반으로 한 품질관리 절차를 제시하고 있다.
지능형 다짐값은 진동롤러의 드럼과 지반 사이의 동적 상호작용을 기반으로 산출되지만, 대표적인 지표인 CMV나 CCV는 주파수 해석을 통해 얻어지는 무차원 값으로서 밀도나 강성을 직접적으로 측정하는 값은 아니다. 비교적 최근에 제안된 kB나 Evib는 스프링-대시팟(spring-dashpot) 모델을 기반으로 지반 강성을 추정하지만, 다양한 가정이 포함되어 있으며 지표의 신뢰성이 아직 완전히 검증되지 않았다. 즉, 오랜 기간 적용되어 온 일점품질시험과 달리 지능형 다짐값은 품질 관리에 적용할 절대적인 기준값이 제시되어 있지 않다.
이에 따라 관련 기준들(RVS 08.03.02, 1999; ISSMGE, 2005; FHWA, 2014; KCS 10 20 70, 2021)에서는 지능형 다짐값을 상대적인 품질지표로 활용하도록 규정하고 있다. 따라서 지능형 다짐 기술을 적용하기에 앞서, 대상 현장의 소규모 영역에서 다음과 같은 과정에 따라 시험시공을 수행해야 한다: (1) 지능형 다짐값과 일점품질시험을 동시에 수행하고, (2) 두 시험 결과 간의 상관관계를 회귀분석을 통해 도출하며, (3) 일점품질시험 결과 중 품질 기준을 만족하는 값에 대응하는 지능형 다짐값을 목표값으로 설정한다. 이에 따라 여러 연구들(Mooney et al., 2003; Thompson and White, 2007; Cai et al., 2017; Meehan et al., 2017; Baek et al., 2023; Baek et al., 2024)에서는 지능형 다짐값과 일점품질시험 간의 상관성을 분석하여 지능형 다짐값이 다짐품질의 신뢰성 있는 지표로 활용될 수 있음을 입증해왔다. 그러나 지능형 다짐값은 연속적으로 측정되는 데이터인 반면, 일점품질시험 결과는 특정 지점에서 얻어지는 이산적인 측정값이므로 상관성 분석 시 어느 지능형 다짐값을 일점품질시험 결과와 대응시켜야 하는지에 대한 명확한 기준이 부재하다. 기존의 관련 기준들에서도 지능형 다짐값과 일점품질시험 결과 간의 상관성 분석에 대한 구체적인 절차가 제시되어 있지 않다.
본 연구에서는 현장시험을 통해 대표적인 지능형 다짐값인 CMV와 일점품질시험(들밀도시험, 평판재하시험, LWD 시험, DCP 시험) 결과를 확보한 뒤, 세 가지 분석 방법(단일점 기반 분석, 전체 평균 분석, 영역 기반 분석)을 적용해 상관성을 체계적으로 분석했다. 기존 연구들이 주로 CMV와 일점품질시험 값을 1:1로 대응(단일점 기반 분석)하거나 전체 평균값을 비교하는 방식(전체 평균 분석)에 집중해 왔던 반면, 본 연구에서는 일점품질시험 수행 지점을 중심으로 설정한 일정 반경 내의 지능형 다짐값을 활용하는 영역 기반 분석을 추가로 도입함으로써 공간적 변동성을 고려한 상관성 평가를 수행했다. 이를 통해 CMV와 일점품질시험 결과 간 가장 높은 상관성을 보이는 분석 방법을 도출하고 목표 지능형 다짐값을 산정하는 절차를 제안했다. 본 논문의 구성은 다음과 같다. 2장에서는 지능형 다짐값과 일점품질시험 결과 간 상관성 분석 시 고려해야 할 사항과 본 연구에서 적용한 분석 방법론을 기술하였다. 3장에서는 현장시험 조건을, 4장에서는 분석 결과를 제시하였으며, 5장에서는 연구의 요약과 결론을 제시하였다.
2. 지능형 다짐값과 일점품질시험 결과 간 상관성 분석
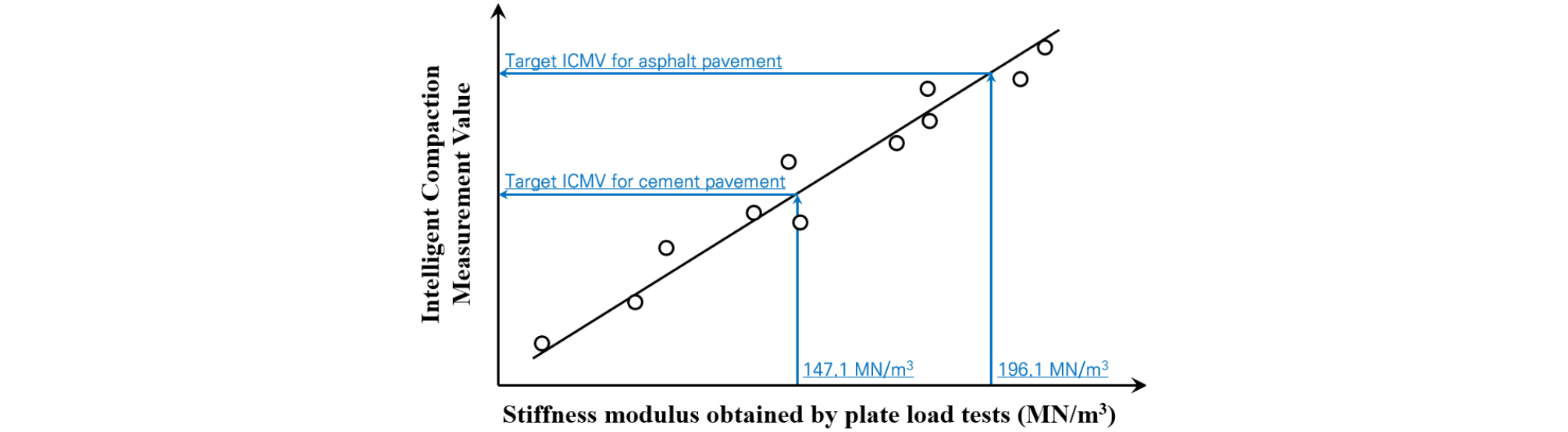
지능형 다짐 관련 기준들(RVS 08.03.02, 1999; ISSMGE, 2005; FHWA, 2014; KCS 10 20 70, 2021)에서는 소규모 시험시공을 수행하여 지능형 다짐값과 일점품질시험 결과 간 상관성을 분석하고, 이를 바탕으로 품질관리에 활용할 목표 지능형 다짐값을 도출하도록 명시하고 있다. 기존 연구들(Forssblad, 1980; Hansbo and Pramborg, 1980; Krober et al., 2001; Thompson and White, 2007; White and Thompson, 2008; Liu et al., 2016; Kumar et al., 2016; Meehan et al., 2017)은 지능형 다짐값과 일점품질시험 결과가 선형적인 상관관계를 보인다는 점을 반복적으로 보고하고 있으며, 이에 따라 상관성 분석에서는 두 측정값 사이의 선형회귀식을 활용하는 것이 일반적인 절차로 자리 잡고 있다. 선형회귀식이 도출되면, 일점품질시험 결과 중 품질 기준을 만족하는 값에 대응하는 지능형 다짐값을 목표값으로 설정한다. Fig. 1은 지능형 다짐값과 평판재하시험 결과(지지력계수) 간 상관관계 분석의 예시를 나타낸 것이다. 예를 들어, 시멘트 포장과 아스팔트 포장이 예정된 도로 노상의 경우, KCS 11 20 20(2023)에서 제시하는 지지력계수의 품질 기준은 각각 147.1 MN/m3과 196.1 MN/m3이며, 이에 대응하는 지능형 다짐값이 해당 현장의 목표값으로 설정된다.
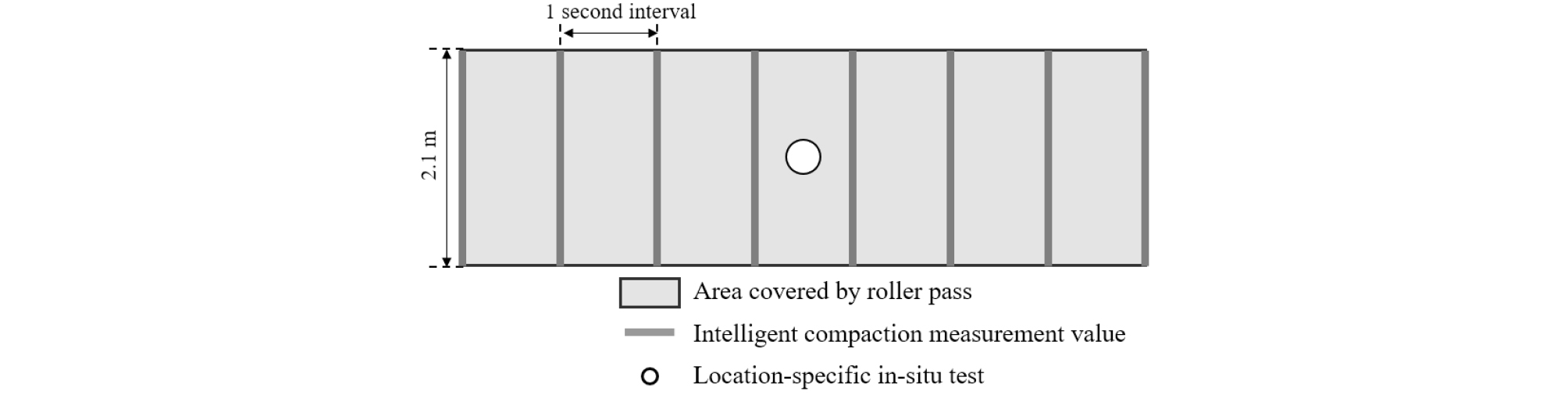
그러나 상관성 분석 시, 어떤 지능형 다짐값을 일점품질시험 결과와 대응시켜야 하는가에 대한 명확한 기준이 없다. 가속도계로부터 산출되는 지능형 다짐값은 GPS 위치정보와 연동되어 공간상의 특정 지점에 기록된다. 가속도는 동적 계측값이므로 지능형 다짐값은 연속적으로 측정되지만, GPS 위치정보는 약 1초 간격으로 수집되므로 실질적으로 지능형 다짐값은 1초마다 하나씩 기록되는 데이터로 간주할 수 있다. 반면, 일점품질시험은 특정 지점에서만 수행되는 이산적인 측정값이다. 따라서 Fig. 2와 같이, 일점품질시험이 수행된 정확한 위치에서 지능형 다짐값이 존재하지 않을 수 있으며, 어떤 값을 대응시키느냐에 따라 상관성 분석 결과가 달라질 수 있다.
단일점 기반 분석(point-by-point analysis)은 이러한 차이를 가장 단순하게 해결하는 방식으로, 일점품질시험 인근에서 얻어진 하나의 지능형 다짐값을 대응시켜 비교하는 방법이다(White and Thompson, 2008). 그러나 Fig. 3에 나타낸 바와 같이, 지능형 다짐값과 일점품질시험의 물리적 영향 범위는 상이하다. 예를 들어, 10톤급 진동롤러는 폭 약 2.1 m 범위의 지반을 동시에 가진시키고, 영향깊이는 약 1.0~1.2 m에 달한다. 반면, 대부분의 일점품질시험은 수십 cm 이내의 매우 제한적인 영역만을 반영한다. 또한 지능형 다짐값은 진동롤러의 주행속도, 진폭, 진동상태 등의 순간적 구동조건 변화와 지반의 국부적 불균질성(함수비, 입도 변화 등)에 민감하게 반응하므로, 단일점 기반 비교 시 국부적 변동성으로 인해 상관성이 낮게 나타나는 문제가 여러 선행연구(Thompson and White, 2007; White and Thompson, 2008; Vennapusa et al., 2009)에서 보고되어 왔다. 이에 Meehan et al.(2017)은 현장 전 영역에서 측정된 지능형 다짐값과 일점품질시험 결과를 평균하여 비교하는 전체 평균 분석(all-average analysis) 방법을 제안하였으나, 이는 시험지점의 국부 정보를 반영하지 못한다는 단점이 있으며 후속 검증 연구는 부족한 실정이다.
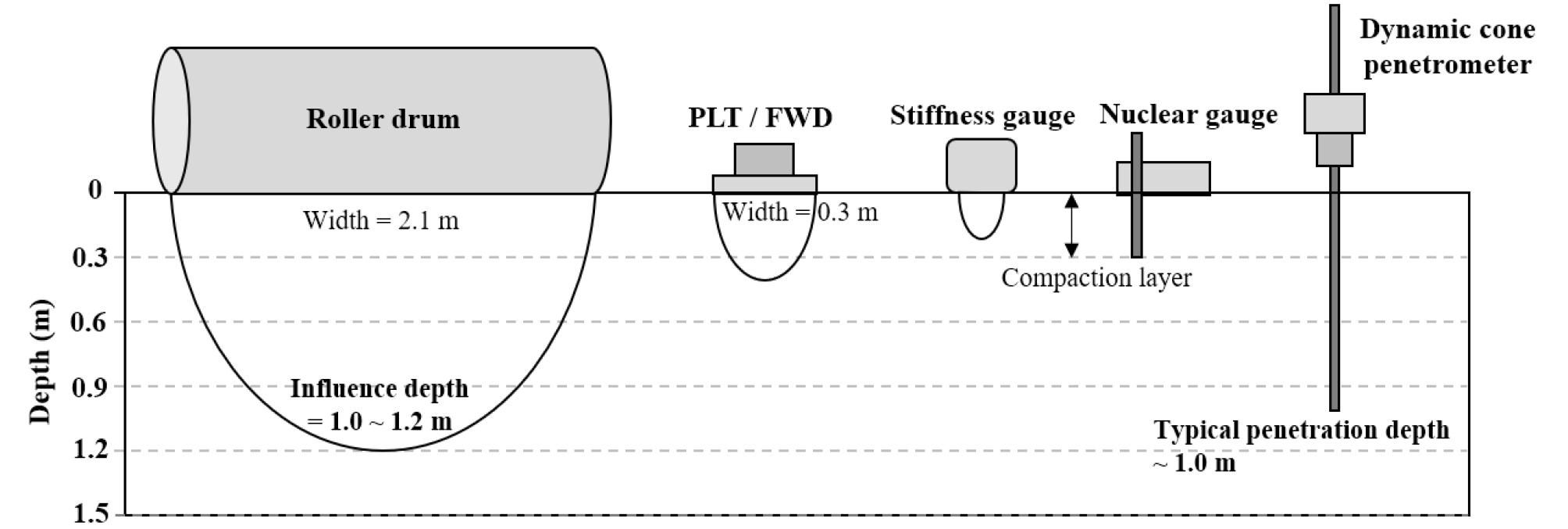
Fig. 3
Difference in measurement influence depths for different measurements (modified from White, 2008)
본 연구에서는 지능형 다짐값과 일점품질시험 결과의 최적 상관성 분석법을 도출하기 위하여 단일점 기반 분석, 전체 평균 분석, 영역 기반 분석(area-based analysis)을 함께 적용했다(Fig. 4). 단일점 기반 분석에서 활용되는 지능형 다짐값은 최근접 이웃법(nearest-neighborhood method), 역거리가중치법(inverse distance weighting), 정규 크리깅(ordinary kriging) 등 다양한 공간보간 기법을 적용할 수 있다. Meehan et al.(2017)은 이러한 기법들 간 상관성 분석 결과의 차이가 크지 않다고 밝혔으며, 이에 본 연구에서는 분석의 간편성을 고려하여 최근접 이웃법을 적용했다.
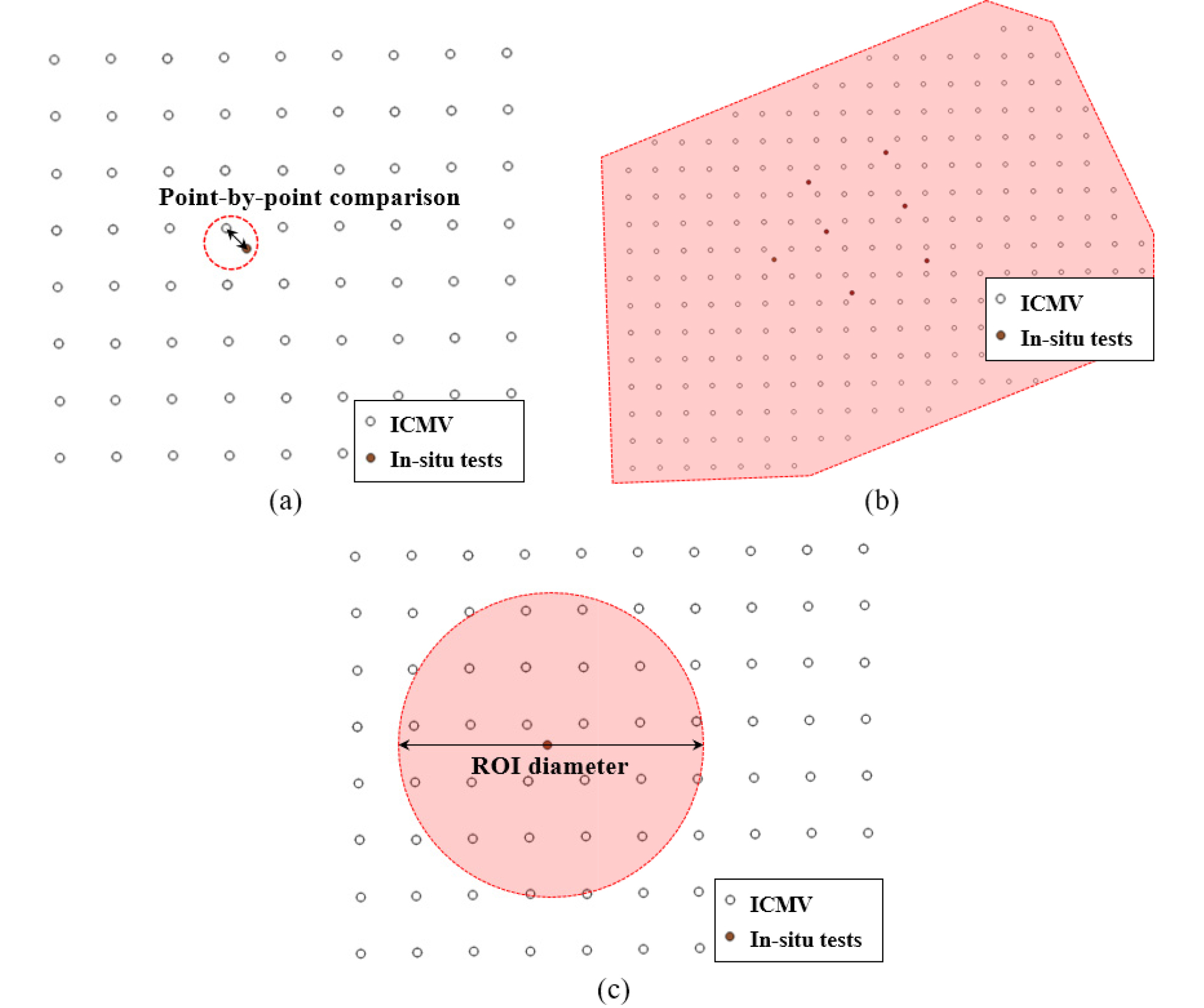
본 연구의 영역 기반 분석은 일점품질시험 위치를 중심으로 일정 반경 내 관심영역(Region of Interest, ROI)을 설정하고, ROI의 크기를 점진적으로 변화시키며 ROI 내 지능형 다짐값의 평균과 일점품질시험 결과 간의 피어슨 상관계수(Pearson correlation coefficient, R)를 반복 계산하는 방법이다. 가장 높은 상관계수를 보이는 ROI 크기를 최적 ROI로 정의하고, 해당 영역의 평균 지능형 다짐값과 품질시험 결과 간의 상관성을 분석했다. 상술한 세 가지 분석 방법을 현장시험 결과에 적용함으로써, 지능형 다짐값과 일점품질시험 결과 간의 상관성이 가장 높게 나타나는 최적의 분석 방법을 도출하였다.
3. 현장시험 방법 및 조건
3.1 현장시험 개요
Table 1은 본 연구에서 수행된 현장시험 조건을 나타낸다. 세 개의 토공사 현장에 폭 10~15 m, 길이 25~35 m 규모의 시험부지를 조성했으며, 시험부지의 원지반(underlying layer) 위에 성토재료를 약 400 mm 두께로 균일하게 포설했다. 지능형 다짐값의 영향깊이가 약 1.0~1.2 m임을 고려하여(White, 2008), 성토 전 원지반을 왕복 3회 다짐해 불균질한 지반조건이 지능형 다짐값에 미치는 영향을 최소화하였다. 이후 지능형 다짐 시스템이 장착된 진동롤러를 이용하여 왕복 3~5회 다짐을 수행하였으며, 각 왕복 다짐횟수 단계마다 일점품질시험(들밀도시험, 평판재하시험, LWD 시험, DCP 시험)을 실시했다. 진동롤러는 전진으로 시작하여 후진으로 마무리하는 왕복 다짐 방식을 적용했다.
Table 1.
Summary of field test conditions (FDT, PLT, LWDT, and DCPT denote field density test, plate load test, lightweight deflectometer test, and dynamic cone penetrometer test, respectively)
시험에 사용된 진동롤러는 Bomag BW211D 모델로, 총중량 10,600 kg, 드럼 하중 5,670 kg, 드럼 직경 1.5 m, 드럼 폭 2.13 m의 제원을 가진다. 진동롤러 캐빈(cabin) 상단에는 MBC사의 TDR-2000 고정밀 GPS를 부착했고, 드럼 축에는 Geodynamik 사의 Compactometer를 설치했다(Fig. 5). TDR-2000은 DMB 데이터 채널을 통해 보정신호를 수신하여 RTK 급 정밀 측위를 수행했고, Compactometer는 내장 가속도계를 이용하여 대표적인 지능형 다짐값인 CMV를 도출했다. 측위 정보와 CMV 값은 매칭되어 1초에 1회 간격으로 서버에 저장되었다. CMV 측정값에는 진동롤러의 구동 조건(속도, 주파수, 진폭)이 영향을 미칠 수 있으므로(Floss et al., 1983), 롤러의 주행 방향을 전환하거나 정지하는 구간을 제외하고는 주행 속도를 약 3.0 km/h, 주파수를 31.8 Hz, 진폭을 0.95 mm로 일정하게 유지했다.

3.2 성토재료
성토재료는 각 토공사 현장에서 실제로 사용되고 있는 흙을 이용하였다. Table 2는 본 연구에서 사용된 성토재료의 기본 물성값을 나타낸다. 세 현장의 성토재료는 모두 통일분류법(Unified Soil Classification System, USCS)에 따라 SM(실트질 모래)으로 분류되었으며, 4번체 통과율은 각각 A 현장 69.7%, B 현장 77.8%, C 현장 100%로 나타났다. 또한 200번체 통과율은 A 현장 12.1%, B 현장 9.6%, C 현장 16.3%였다. 이들 성토재료는 국내 쌓기 표준시방서(KCS 11 20 20, 2023)에서 제시한 노상 성토재료 기준(4번체 통과율 25~100%, 200번체 통과율 0~25%)을 모두 만족했다.
Table 2.
Index properties of the earthfill material used in this study
| Test site | USCS | Gs | D10 (mm) | D50 (mm) | #4 passing (%) | #200 passing (%) |
| A | SM | 2.63 | 0.01 | 1.89 | 69.7 | 12.1 |
| B | SM | 2.67 | 0.07 | 1.47 | 77.8 | 9.6 |
| C | SM | 2.61 | 0.03 | 0.09 | 100 | 16.3 |
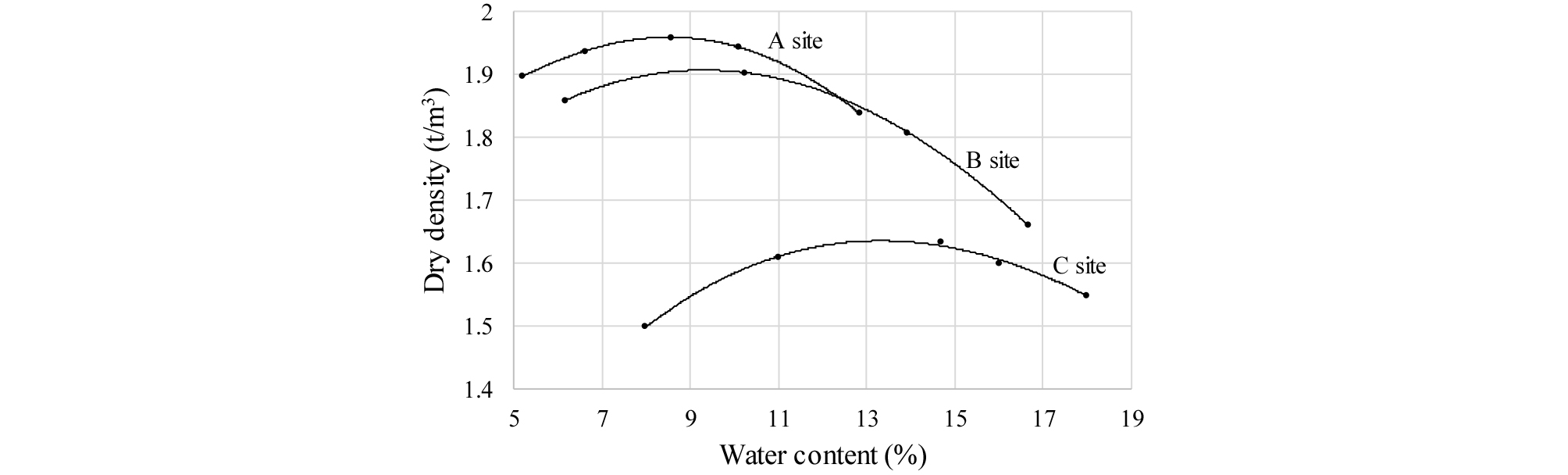
Fig. 6은 KS F 2312(2022)에 따라 실시한 수정다짐시험 결과로 얻은 다짐곡선을 나타낸 것이다. 세 성토재료의 최대 건조밀도(maximum dry density)는 A 현장 1.96 t/m3, B 현장 1.91 t/m3, C 현장 1.65 t/m3로 나타났으며, 최적함수비(optimum moisture content)는 A 현장 8.3%, B 현장 9.8%, C 현장 13.9%였다. 다짐 전 각 현장의 임의의 다섯 위치에서 시료를 채취하여 함수비를 측정한 결과 세 현장 모두 최적함수비의 ± 2% 이내 범위에 포함되어, 국내 쌓기 표준시방서(KCS 11 20 20, 2023)에서 제시한 관리기준을 충족하는 것으로 나타났다.
3.3 지능형 다짐값 및 일점품질시험
진동롤러는 드럼을 통해 지반에 동적하중을 가하여 다짐을 수행한다. CMV는 드럼과 지반 사이의 동적 상호작용(dynamic interaction)을 분석하여 산정되는 무차원(dimensionless) 지표이다. 롤러의 다짐 과정에서 CMV의 산정 절차는 다음과 같다(Fig. 7 참조): (1) 진동롤러의 드럼 축에 부착된 가속도계를 이용하여 진동다짐 중의 가속도 값을 측정하고, (2) 시간 이력(time domain)에 따라 측정된 가속도 값을 고속 푸리에 변환(Fast Fourier Transform, FFT)을 통해 주파수 영역(frequency domain)으로 변환한 뒤, (3) Eq. (1)에 따라 CMV를 산정한다.
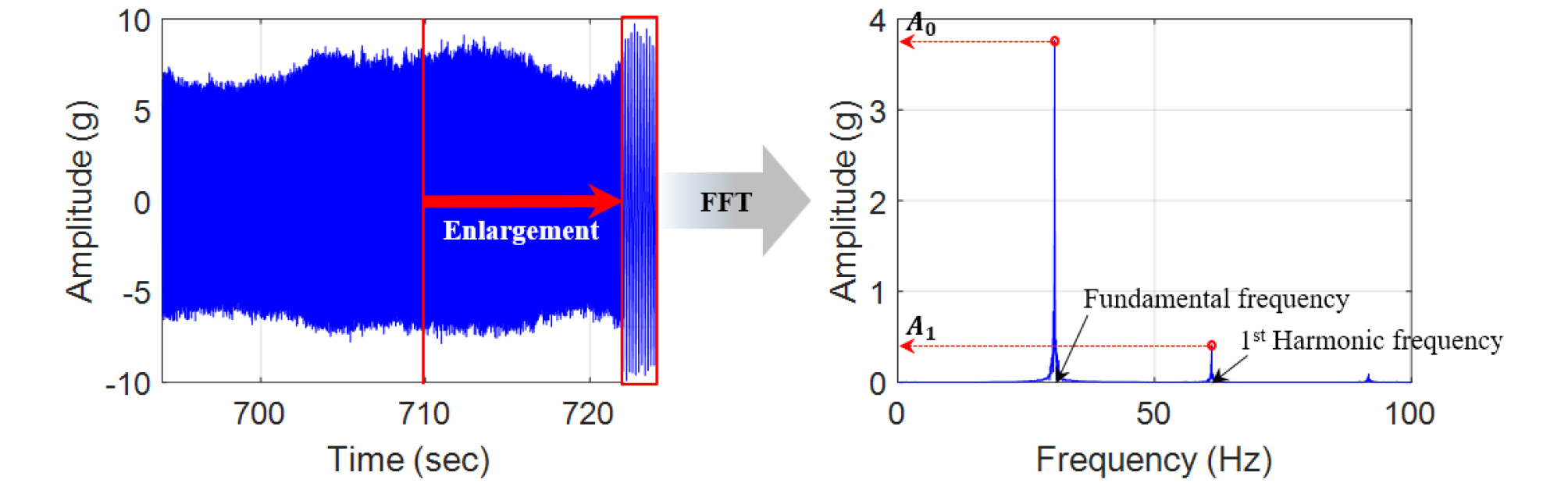
여기서, A0과 A1은 각각 드럼에 부착된 가속도계로부터 얻은 시간 이력 가속도의 기본 주파수(즉, 가진 주파수)와 첫 번째 조화성분의 진폭을 의미한다(Sandstrom and Pettersson, 2004). CMV 값은 지반의 강성이 증가할수록 증가하므로, 지반의 다짐 정도를 평가하는 유효한 지표로 활용될 수 있다(Meehan et al., 2017). 다만, CMV는 고속 푸리에 변환 시 적용되는 window 크기(즉, 포함되는 vibration cycle 수), 신호 필터링 방식, 스펙트럼 해석 과정 등에 따라 값이 달라질 수 있으며, 이러한 세부 분석 조건은 장비 제조사마다 상이하다. Trimble, Leica, Geodynamik 등의 주요 제조사는 각자의 독자적 알고리즘을 적용하고 있으나, 해당 알고리즘은 공개되지 않아 일종의 “black box”로 분류된다(Baker and Meehan, 2026). 본 연구에서는 다수의 선행연구(Mooney and Rinehart, 2007; White and Thompson, 2008; Baek et al., 2024; Baek et al., 2025)를 통해 신뢰성이 충분히 검증된 Geodynamik 사의 Compactometer를 이용하여 CMV를 획득했으며, MBC사의 TDR-2000 고정밀 GPS로부터 획득된 x, y 좌표와 매칭(matching)하여 1초 간격으로 저장했다.
또한 각 왕복 다짐 단계마다 일점품질시험(들밀도시험, 평판재하시험, LWD 시험, DCP 시험)을 수행하고(Table 1과 Fig. 8), 일점품질시험이 수행된 지점의 x, y 좌표는 Hi-Target 고정밀 GPS를 이용하여 측정했다. 들밀도시험과 평판재하시험은 각 왕복 다짐횟수 별로 2회씩 시험부지의 중앙부에서 수행했다. 들밀도시험은 KS F 2311(2022)에 제시된 모래치환법(sand-cone method)에 따라 수행하여 건조단위중량을 획득했다. 평판재하시험은 KS F 2310(2020)에 제시된 절차에 따라 직경 300 mm의 평판을 이용해 수행했으며, 0.125 cm 침하량을 기준으로 지지력계수를 산정했다.
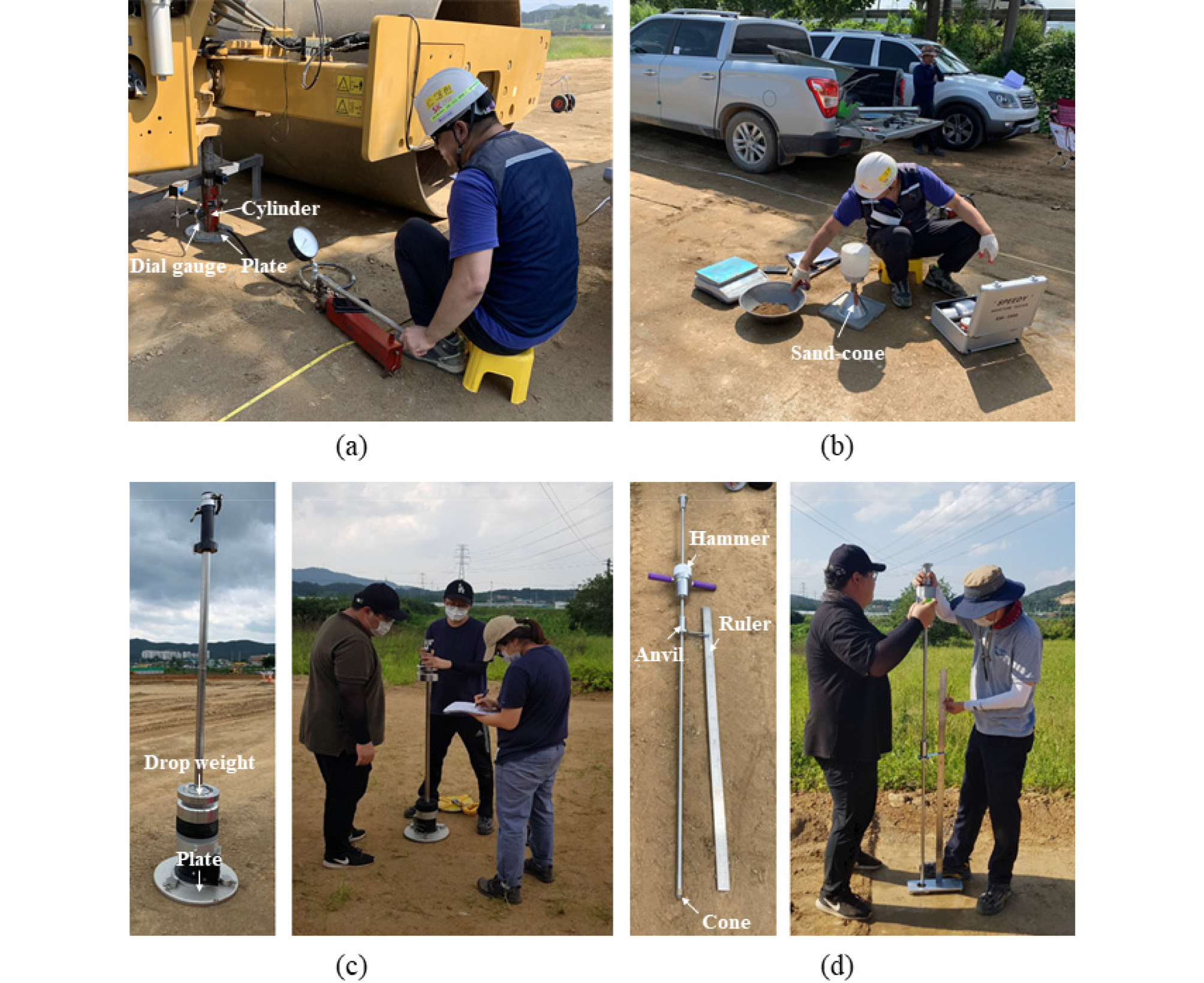
LWD 시험과 DCP 시험은 각 왕복 다짐횟수 별로 20~35회 씩 시험부지 내에서 일정 간격으로 수행했다. LWD 시험은 낙하추를 자유낙하시켜 평판을 타격한 후 처짐량을 측정하여 지반의 탄성계수(ELWD)를 산정하는 시험으로, ASTM E2583-07(2020)에 따라 수행했다. 낙하추 중량, 낙하 높이, 평판 직경은 제품에 따라 다르며, 탄성계수 산정법에도 차이가 있어 결과도 상당히 다르게 나타나는 것으로 알려져 있다(Fleming et al., 2007). 본 연구에서는 전 세계적으로 가장 널리 사용되는 Dynatest 3032 LWD 장비(낙하추 중량 10 kg, 낙하 높이 700 mm, 평판 직경 300 mm)를 사용했다. DCP 시험은 중량 8 kg의 낙하추를 575 mm 높이에서 자유낙하시켜 엔빌(anvil)을 타격해 원추각 60°, 콘 직경 20 mm의 콘을 지반에 관입시키는 시험으로, ASTM D6951(2023)에 따라 수행했다. DCP 시험 결과는 한 번의 타격에 따른 평균 관입량을 의미하는 DPI(Dynamic Penetration Index)로 나타낸다. 본 연구에서는 Baek et al.(2022)의 절차에 따라 LWD 및 DCP 시험 시 초기 1~2회의 타격을 seating drop으로 간주하여 분석에서 제외하였다. 즉, LWD의 경우 3~5회 타격에서 측정된 탄성계수의 평균값을 사용하였으며, DCP의 경우 3~7회 타격에서 측정된 DPI를 이용하였다.
4. 현장시험 결과 및 분석
4.1 다짐횟수에 따른 다짐품질 지표 변화 분석
Fig. 9는 현장시험을 통해 획득한 다짐품질 지표들의 평균값과 변동계수(coefficient of variation, CV)를 왕복 다짐횟수에 따라 나타낸 것이다. 변동계수는 특정 다짐횟수에서 얻어진 데이터의 표준편차를 평균값으로 나눈 백분율(%)로 정의된다. 들밀도시험과 평판재하시험은 각 다짐 단계에서 2회씩만 수행되었기 때문에, 건조단위중량 및 지지력계수에 대한 변동계수는 통계적으로 유의미하지 않다고 판단하여 CMV, ELWD, DPI에 대해서만 변동계수를 산정했다. CMV는 다짐롤러의 진행 방향(전진 또는 후진)에 따라 영향을 받는 것으로 알려져 있으며(Mooney, 2010), 일점품질시험은 각 왕복 1회 다짐이 완료된 후(즉, 전·후진 완료 후) 수행되었다. 따라서 본 연구에서는 각 왕복 다짐횟수별 최종 다짐 단계인 후진 시 획득된 CMV 값을 분석에 사용했다.
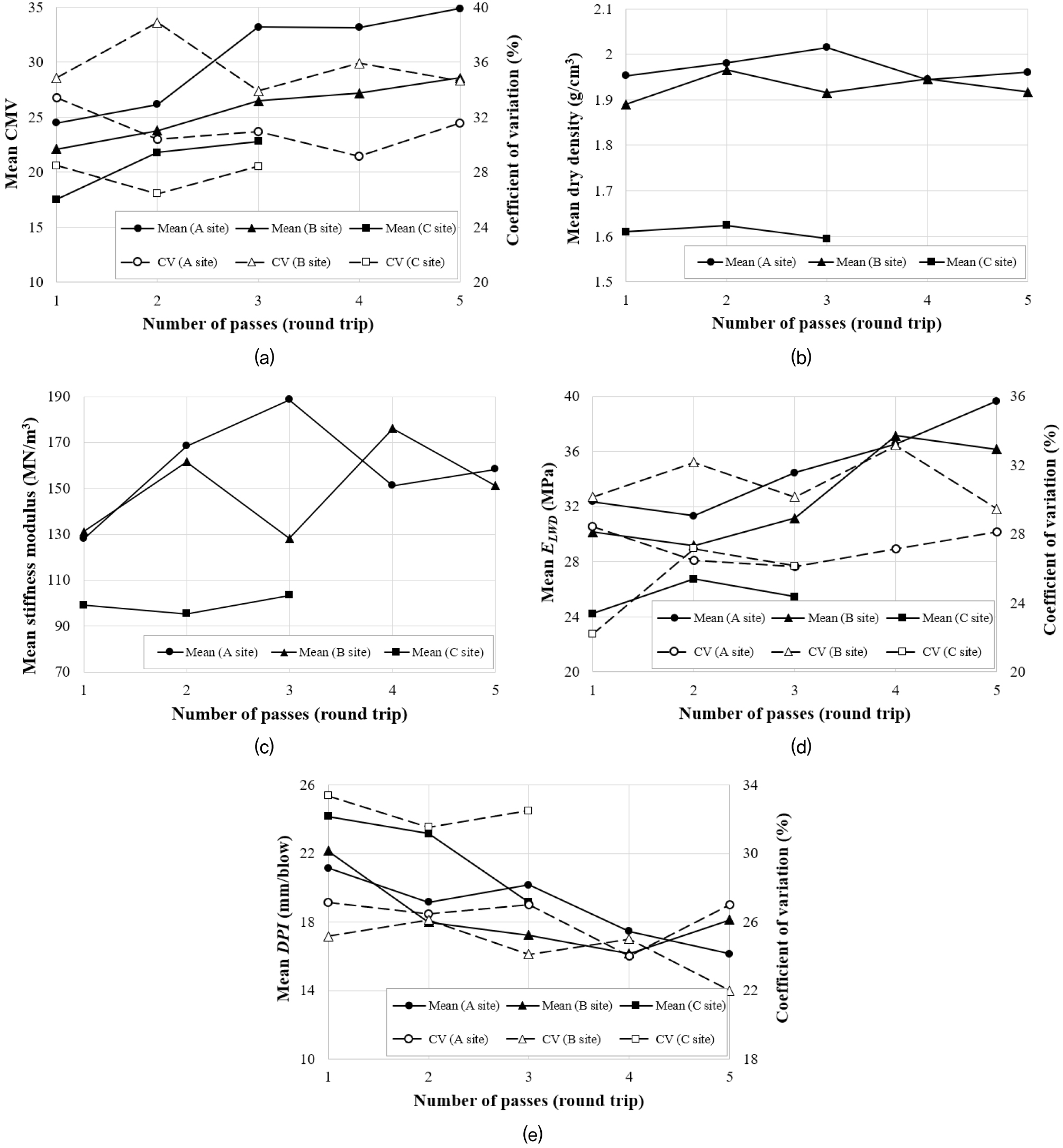
Fig. 9(a)에 나타난 바와 같이, 다짐이 진행될수록 지반의 평균 강성이 증가하여 CMV의 평균값도 증가하는 경향을 보였다. 기존 연구(Baek et al., 2024)와 유사하게, CMV의 변동계수는 26.4~38.9% 범위로 나타나 공간적 변동성이 매우 큰 것으로 확인되었으며, 다짐횟수가 증가하더라도 변동계수의 감소는 뚜렷하지 않았다. 본 연구에서는 실제 현장과 동일하게 시공면 전체를 왕복하며 균등다짐을 수행했는데, 이러한 방식은 평균적인 다짐도 향상에는 효과적이더라도 시공 면적 전반의 균질한 다짐품질 확보에는 한계가 있는 것으로 나타났다.
다짐횟수별로 2회씩만 측정된 건조단위중량과 지지력계수는 다짐횟수 증가에 따른 뚜렷한 증가 경향을 보이지 않고 불규칙하게 분포했다(Fig. 9(b)와 Fig. 9(c)). 건조단위중량은 CMV나 지지력계수와 같은 강성 지표에 비해 최대·최소값(즉, 최대 및 최소 건조단위중량)의 차이가 상대적으로 작아 불규칙성이 두드러지지 않았으나, 지지력계수의 경우 다짐횟수가 증가함에도 오히려 더 작은 값이 나타나는 사례가 명확히 관찰되었다. 이러한 결과는 Fig. 9(a)에서 확인된 바와 같이 현장의 다짐품질이 공간적으로 매우 불균질하다는 점에 기인하며, 시험이 수행된 위치가 결과에 큰 영향을 미친다는 사실을 보여준다. 따라서 도로포장 하부구조 시공 지침(Ministry of Land, Infrastructure and Transport, 2017)에 제시된 1,000 m3당 1회 수준으로 수행되는 들밀도시험 및 평판재하시험만으로는 현장의 다짐품질을 신뢰성 있게 평가하기 어려우며, 시험 위치의 차이만으로도 합격(OK) 또는 불합격(NG) 판정이 좌우될 가능성이 클 것으로 판단된다.
다짐횟수별로 20~35개 지점에서 측정된 ELWD, DPI의 평균값은 다짐횟수가 증가할수록 각각 증가 및 감소하여 전반적인 강성 증가 경향을 보였다(Fig. 9(d)와 Fig. 9(e)). 다만, 다짐횟수 증가했음에도 ELWD가 감소하거나 DPI가 증가하는 구간이 일부 관찰되었는데, 이는 시험이 수행된 20~35개의 지점이 전체 영역을 완전히 대표하기에는 충분하지 않았기 때문으로 판단된다. 그럼에도 불구하고, 다짐횟수별로 2회씩만 측정된 건조단위중량과 지지력계수에 비해서는 다짐에 따른 강성 증가 경향을 훨씬 명확하게 포착하고 있어, 일정 수준 이상의 시험 횟수를 확보할 경우 일점품질시험 방식이라도 평균적인 다짐품질을 효과적으로 파악할 수 있음을 보여줬다. 이는 전체 시공면의 다짐품질을 모집단, 일점품질시험을 표본추출로 간주할 경우, 표본의 수가 증가할수록 모집단의 특성을 더 잘 반영한다는 통계적 원리와도 일치한다. 적정 일점품질시험 횟수는 다짐품질 변동성의 크기, 요구되는 예측 정확도 및 신뢰도 수준 등을 고려하여 결정할 필요가 있으며, 이에 대한 추가 연구가 필요하다.
ELWD, DPI의 변동계수는 22.2~33.4% 범위로 나타났으며, CMV보다는 다소 낮지만 유사한 수준의 공간적 변동성을 보였다. 이는 CMV의 높은 변동성이 단순한 계측 오차나 시스템적 한계에서 비롯된 것이 아니라, 성토재료의 불균질성, 함수비의 국부적 차이 등 실제 지반 조건에 내재된 공간적 변동성을 반영한 것임을 의미한다. 다시 말해, 지금까지는 1,000 m3당 1회 수준으로 들밀도시험 및 평판재하시험을 수행하여 이러한 변동성을 포착하지 못했으나, 현장 전반의 다짐품질이 상당한 공간적 불균질성을 지니고 있음을 보여준다.
이러한 결과는 지능형 다짐 기술의 도입 필요성을 시사한다. 기존의 일점품질시험 기반 다짐품질 관리는 시공면의 일부 지점만을 평가하는 방식이므로 공간적 변동성을 충분히 반영하기 어렵다. 반면, CMV와 같은 지능형 다짐값은 시공면 전체의 다짐 상태를 연속적으로 기록할 수 있어, 공간적으로 불균질한 다짐 특성을 실시간으로 파악하고 국부적인 취약부를 탐지하여 추가 다짐을 수행하는 데 활용될 수 있다. 이를 통해 과다 다짐(over-compaction)과 과소 다짐(under-compaction)을 모두 방지함으로써 전체 시공면의 다짐 균질성을 확보하는 데 기여할 것으로 기대된다.
4.2 CMV와 일점품질시험 결과 간 상관성 분석
본 연구에서는 Fig. 4에 제시한 세 가지 분석 방법(단일점 기반 분석, 전체 평균 분석, 영역 기반 분석)을 적용하여 CMV와 일점품질시험 결과 간 상관성을 분석했다. 영역 기반 분석을 수행하기 위해서는 먼저 분석에 사용할 최적 ROI 크기를 결정해야 한다. 이를 위해 ROI 반경을 0.5 m에서 5.0 m까지 0.5 m 간격으로 변화시키며, 각 일점품질시험 지점 주변 ROI 내의 CMV 평균값과 일점품질시험 결과 간 Pearson 상관계수를 분석했다. ROI 최소 반경을 0.5 m로 설정한 이유는 진동롤러가 약 3 km/h(약 0.83 m/s)의 속도로 이동하며 CMV를 1초 간격으로 계측했으므로, 반경이 0.5 m보다 작은 ROI에서는 CMV 데이터가 존재하지 않는 경우가 발생할 수 있기 때문이다.
Fig. 10에서 확인할 수 있듯이, 모든 일점품질시험에서 ROI 크기가 작을 때는 Pearson 상관계수가 낮다가, 일정 크기까지 증가한 후 다시 감소하는 경향을 보였다. CMV는 진동롤러의 순간적 구동조건 변화와 지반의 국부적 불균질성에 민감하게 반응하므로, 단일 지점에서 측정된 일점품질시험 값과 1:1로 비교할 경우 국부적 변동성이 그대로 반영된다(Thompson and White, 2007; White and Thompson, 2008; Vennapusa et al., 2009). ROI가 지나치게 작은 경우에는 단일점 기반 분석과 유사해져 CMV의 국부적 변동성에 영향을 크게 받기 때문에 상관계수가 낮아지는 것으로 판단된다. 반대로, ROI가 너무 크면 일점품질시험이 수행된 지점과 거리가 먼 영역의 CMV 값이 포함되어 상관성이 다시 감소하게 된다. 분석 결과, 건조단위중량, 지지력계수, ELWD, DPI에 대해 가장 높은 상관계수를 보이는 최적 ROI 반경은 각각 1.5 m, 3.5 m, 2.5 m, 2.0 m로 도출되었으며, 이후의 상관성 분석에서는 이 값을 적용했다.
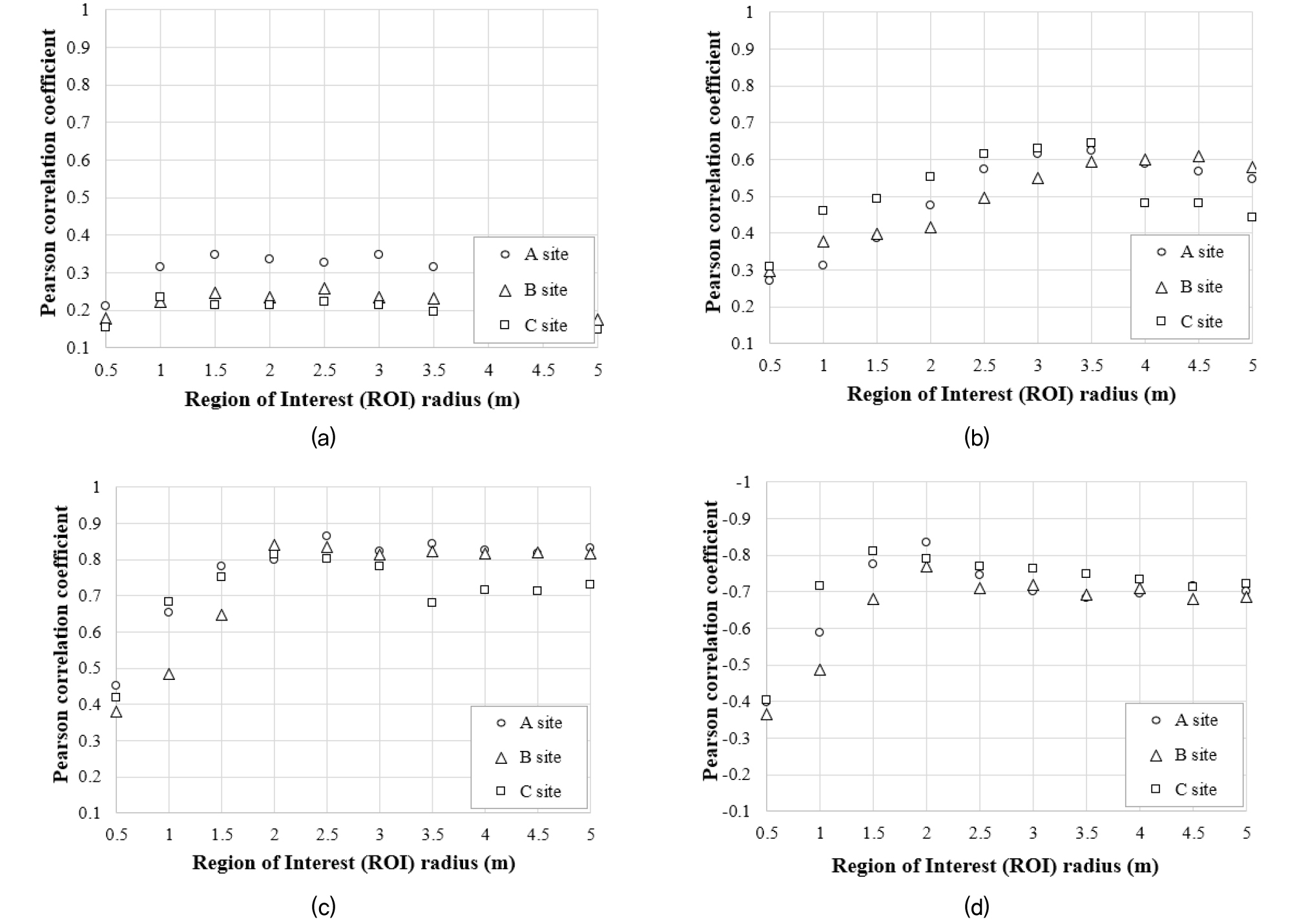
Table 3은 세 가지 분석 방법을 적용한 경우 CMV와 일점품질시험 결과 간 Pearson 상관계수를 정리한 것이다. 건조단위중량과 CMV 간 상관성은 낮게 나타났는데, 이는 CMV가 지반의 강성과 밀접한 지표이며 강성은 다짐도 뿐만 아니라 함수비의 영향을 크게 받기 때문이다(Siekmeier et al., 2009). 동일한 건조단위중량이라도 함수비 증가 시 강성은 감소하는 경향이 있으며, 이에 따라 건조단위중량과 강성 품질 지표가 상관성이 낮다는 점은 기존 연구(Tatsuoka et al., 2021)에서도 동일하게 지적하고 있다.
Table 3.
Pearson correlation coefficient between CMV and location-specific in-situ test results for three analysis methods
분석 결과 대부분의 경우 영역 기반 분석이 가장 높은 상관성을 보였으며, 단일점 기반 분석이 가장 낮은 상관성을 나타내었다. 이는 단일점 기반 분석 시 CMV의 국부적 변동성이 그대로 반영되는 반면, 영역 기반 분석에서는 일정 반경 내 CMV를 공간평균함으로써 이러한 국부 변동성을 효과적으로 완화하고, 동시에 전체 평균 분석처럼 과도하게 넓은 범위를 포함시키지 않기 때문이다. 다만, 본 연구에서 도출된 최적 ROI 반경은 일점품질시험의 영향 범위를 의미하는 것이 아니라, 해당 지점의 다짐상태를 대표하는 CMV 값을 통계적으로 안정화하기 위한 공간적 평균 반경이라는 점에 유의할 필요가 있다.
또한 ELWD와 DPI는 측정 지점 수가 많아 Meehan et al.(2017)의 결과와 유사하게 전체 평균 분석에서도 비교적 높은 상관성이 확보되었으나, 측정 횟수가 제한적인 건조단위중량과 지지력계수는 전체 평균 분석의 상관성이 낮게 나타났다. 이는 CMV, ELWD, DPI가 시공면 전체의 다짐 상태를 보다 넓게 반영할 수 있었던 반면, 건조단위중량과 지지력계수는 매우 제한된 지점만을 대표했기 때문이다. 일점품질시험 중 LWD 및 DCP 시험은 비교적 간편하여 다수 지점에서 수행하기 용이하지만, 들밀도시험과 평판재하시험은 시간이 많이 소요되어 실제 현장에서 충분한 시험 횟수를 확보하기 어렵다는 한계가 있다(Baek et al., 2022). 국내 쌓기 표준시방서(KCS 11 20 20, 2023)에서도 LWD 및 DCP 시험의 예외적 활용을 인정하고 있음에도, 현장 품질관리는 여전히 들밀도시험과 평판재하시험 중심으로 운영되고 있어 시공면 전체의 품질을 평가하는 데 한계가 있다. 따라서 현행 다짐품질 관리방식을 개선하기 위해서는, (1) 일점품질시험 결과를 보정할 수 있는 지반의 국부적 변동성의 기록·관리, (2) 통계적으로 전체 시공면을 대표할 수 있는 충분한 횟수의 일점품질시험 수행, 또는 (3) 지능형 다짐기술을 활용한 연속적 품질평가 체계의 도입이 필요하다.
지능형 다짐 관련 기준들(RVS 08.03.02, 1999; ISSMGE, 2005; FHWA, 2014; KCS 10 20 70, 2021)에서는 시험시공을 통해 지능형 다짐값과 일점품질시험 결과 간 상관성을 분석하고, 이를 기반으로 목표 지능형 다짐값을 설정하도록 규정하고 있다. 그러나 어떤 지능형 다짐값을 기준으로 설정해야 하는지에 대해서는 구체적인 지침이 제시되어 있지 않다. 본 연구 결과를 바탕으로 공간적 변동성을 고려한 상관성 평가 및 목표 지능형 다짐값을 산정하는 절차를 다음과 같이 제안할 수 있다.
(1) 시험시공 단계에서 지능형 다짐을 수행하여 CMV를 취득하고, 왕복 1회 다짐이 완료될 때마다 평판재하시험, LWD 시험, DCP 시험 등 강성 기반 일점품질시험을 실시한다.
(2) CMV와 일점품질시험 결과 간 상관성 분석을 영역 기반 분석 절차에 따라 수행한다. 본 연구에서 도출된 ROI 크기를 사용할 수도 있으나, 현장 조건에 따라 최적 ROI 값이 달라질 수 있으므로 현장별 최적 ROI를 도출하는 것이 더 바람직하다.
(3) 최적 ROI 내 CMV 평균값과 일점품질시험 결과 간 선형 회귀식을 Fig. 1과 유사한 방식으로 작성한다. 품질 기준을 만족하는 일점품질시험 값에 대응하는 CMV를 목표 지능형 다짐값으로 설정하고 이를 기반으로 다짐품질 관리를 실시한다.
본 절차는 실제 토공사 현장에서 사용되는 성토재료와 진동롤러를 대상으로 수행된 현장시험 결과에 기반하고 있어, 지능형 다짐 기반 토공사 품질관리 체계를 구축하기 위한 기초 자료로 활용될 수 있다. 다만, 보다 다양한 지반 조건과 장비 조건을 포함한 현장시험 데이터를 축적하여, 본 연구에서 제안한 상관성 분석 절차와 목표 지능형 다짐값 설정 방법이 다양한 시공 환경에서도 일관되게 적용될 수 있는지에 대한 추가적인 검증이 필요하다. 아울러, 본 연구에서 도출된 최적 ROI 반경은 특정 지점의 다짐상태를 대표하는 CMV의 경험적 공간 평균 반경이므로, 향후에는 지능형 다짐값의 공간적 변동성을 지구통계학적 기법으로 정량화하고 이를 바탕으로 특정 지점을 대표할 수 있는 이론적으로 의미 있는 공간적 영향 범위를 규명하는 연구가 필요하다. 이러한 접근은 영역 기반 분석에 근거한 상관성 평가의 이론적 정당성을 강화하고, 다양한 현장 조건에서 적용 가능한 보다 일반화된 목표 지능형 다짐값 산정 절차를 확립하는 데 기여할 것으로 기대된다.
5. 결 론
본 연구에서는 세 개의 토공사 현장을 대상으로 대표적인 지능형 다짐값인 CMV와 일점품질시험(들밀도시험, 평판재하시험, LWD 시험, DCP 시험) 결과 간 상관성을 분석했다. 이를 바탕으로 기존 일점품질시험 기반의 다짐품질 관리 방법의 한계를 검토하고, CMV와 일점품질시험 간 상관관계를 바탕으로 목표 지능형 다짐값을 결정하는 절차를 제안했다. 본 연구의 주요 결론은 다음과 같다.
(1) CMV와 다수의 지점에서 측정된 일점품질시험 결과(ELWD와 DPI)는 반복 다짐에 따라 지반의 평균적인 다짐품질이 향상되는 경향을 잘 반영했다. CMV, ELWD, DPI의 변동계수는 약 20~40% 범위로 크게 나타나, 성토재료와 함수비의 불균질성에 기인한 다짐 품질의 공간적 변동성이 매우 크다는 점을 확인하였다. 반면, 각 다짐단계에서 두 지점만 측정된 건조단위중량과 지지력계수는 다짐횟수 증가에 따른 뚜렷한 증가 경향을 보이지 않았다. 이는 소수 지점에서 수행되는 일점품질시험 결과만으로는 시공면 전체의 다짐 상태를 대표하기 어렵다는 점을 의미한다. 따라서 일점품질시험 결과를 보정할 수 있는 지반의 국부적 변동성의 기록·관리, 다수 지점에서의 일점품질시험 기반 통계적 평가 또는 지능형 다짐기술을 활용한 연속적 품질평가 체계의 도입이 필요할 것으로 판단된다.
(2) CMV와 일점품질시험 결과 간 상관성을 단일점 기반 분석, 전체 평균 분석, 영역 기반 분석으로 비교한 결과, 대부분의 품질시험에서 영역 기반 분석이 가장 높은 상관성을, 단일점 기반 분석이 가장 낮은 상관성을 나타냈다. 영역 기반 분석 시, ROI가 너무 작으면 CMV의 국부적 변동성이 과도하게 반영되어 상관성이 낮아졌고, 반대로 ROI가 너무 크면 CMV와 일점품질시험 지점과의 공간적 불일치가 커져 상관성이 다시 감소했다. 건조단위중량, 지지력계수, ELWD, DPI에 대한 최적 ROI 반경은 각각 1.5 m, 3.5 m, 2.5 m, 2.0 m로 도출되었다. 이는 지능형 다짐값과 일점품질시험 결과의 영향 범위를 고려한 영역 기반 접근이 1대1 비교보다 더 타당함을 보여준다.
(3) CMV를 품질관리 지표로 활용하기 위한 목표 지능형 다짐값 도출 절차를 제안했다. 제안된 절차는 (a) 강성 기반 일점품질시험 결과와 CMV 간 상관성을 영역 기반 분석을 통해 평가하고, (b) 현장별 최적 ROI 내 CMV 평균값과 일점품질시험 결과 간의 선형 회귀식을 도출한 뒤, (c) 해당 회귀식을 통해 품질 기준을 만족하는 일점품질시험 값에 대응하는 CMV를 목표 지능형 다짐값으로 설정하는 방식이다. 이는 목표 지능형 다짐값 도출 시 “어떤 지능형 다짐값을 일점품질시험 결과와 대응시켜야 하는가”에 대한 기준을 제공한다는 점에서 실무적 의의를 가진다.
상술한 결과는 실제 토공사 현장에서 사용되는 성토재료를 대상으로 수행된 현장시험을 통해 도출된 것이므로, 지능형 다짐값 기반 토공사 품질관리 체계를 구축하기 위한 기초 자료로 활용될 수 있다. 다만 본 연구는 세 종류의 SM(실트질 모래) 계열 성토재료, 하나의 10톤급 진동롤러, CMV 기반 지능형 다짐 시스템을 대상으로 통제된 조건에서 수행되었다는 점에서 한계를 가진다. 향후에는 보다 다양한 재료 특성, 함수비 범위, 지반 조건, 진동롤러 종류, 지능형 다짐값을 포함한 현장 데이터를 축적하여, 본 연구에서 제안한 상관성 분석 절차와 목표 지능형 다짐값 설정 방법의 보편성을 검증할 필요가 있다.
또한 본 연구에서 제시된 최적 ROI 반경은 특정 지점의 다짐상태를 대표하는 CMV 값을 통계적으로 안정화하기 위해 경험적으로 산정된 공간 평균 반경이라는 점에서, 지반공학적 의미를 갖는 영향범위와 동일한 개념으로 볼 수 없다. 따라서 향후 연구에서는 지능형 다짐값의 공간적 변동성을 지구통계학적 기법을 통해 정량화하고, 이를 기반으로 특정 지점을 대표할 수 있는 공간적 영향 범위를 규명할 필요가 있다. 이러한 접근은 영역 기반 분석을 활용한 상관성 평가의 이론적 정당성을 강화하고, 다양한 현장 조건에서 적용 가능한 보다 일반화된 목표 지능형 다짐값 산정 절차를 확립하는 데 기여할 것으로 기대된다.
