

1. 서 론
2. 우주 행성의 환경
2.1 달
2.2 화성
2.3 소행성
3. 우주 행성 지반 탐사 미션
3.1 달
3.2 화성
3.3 소행성
3.4 기술전망
4. 대한민국 우주 자원 탐사 기술 동향
5. 결 론
1. 서 론
냉전시대 체제경쟁이 촉발하였던 우주개발 경쟁은 냉전이 끝나면서 침체기에 들어섰었다. 하지만 최근 10년 동안 미래 산업 발전의 원동력과 더불어 미래 지구 자원 고갈에 대비하고 희토류와 같은 희귀 자원 획득을 위해 미국, 유럽, 일본, 중국 등의 선진국들이 우주 기술에 다시 관심을 갖기 시작하였고, 우주 개발 및 달과 화성을 포함한 우주 행성 탐사 프로젝트를 수행하고 있다(Lacerda, 2010; Hashimoto et al., 2014; Musilova et al., 2020). 특히, 유럽우주국(ESA)은 2030년에 달 착륙선을 달에 보낼 계획이며, 미항공우주국(National Aeronautics and Space Administration, NASA)은 달에 2028년까지 거주 가능한 기지를 건설할 예정이다(Musilova et al., 2020). 더불어 미국 민간 업체 Space X는 2029년까지 화성에 사람을 이주시키고자 연구를 진행하고 있다. 뿐만 아니라 우리나라에서도 우주행성 탐사를 위한 연구가 활발히 진행되고 있으며 최근 우주발사체 나로호 발사가 성공하면서 7대 우주강국(Space club)의 반열에 들어섰다(Wang et al., 2016; Jin et al., 2021; Na et al., 2022).
우주행성 지반탐사는 우주 행성에 자원을 탐사하고 이를 활용하는 것에 목적이 있다. 이를 통해 지구 자원 고갈에 대비하고 인류의 활동범위를 우주로 넓힐 수 있다. 물의 분포 탐사 및 채굴은 향후 우주 개발을 위한 연료 생산에 중요하며, 동시에 향후 해당 행성에 인류가 거주할 경우 물과 산소의 공급처로 활용할 수 있다(Bennett et al., 2020). 리튬은 연료와 산화제로 이용 가능하고, 황은 건설재료 활용할 수 있다(Geer et al., 2021; Benaroya et al., 2018). 또한, 지구 자원은 한정적이고 인류활동의 존속을 위해서는 이를 해결해야 한다. 이에 따라 대체에너지 및 대체물질을 개발하고는 있지만, 동시에 무한한 우주자원을 활용하는 것이 가장 근본적인 해결법이다. 채굴 미션은 우주 행성의 지반 탐사를 통해 존재 유무를 파악하고 이를 활용하여 인류 거주에 지원을 줄 수 있다(Anand et al., 2012).
가장 기본적인 우주 행성 자원 탐사 방법은 궤도 위성을 통해 정보를 얻는 방법이다. 그러나 탐사선의 사진 등으로부터 얻는 광학적 데이터만으로는 얻을 수 있는 우주행성의 지반 정보에는 한계가 있다. 따라서, 직접 채굴을 통해 지반 및 토양에 대한 지반강도, 토양특성, 구성성분 및 자원분포 등의 정보를 얻어야 한다(Carrier et al., 1976; Perko, 2007). 하지만, 직접 인력을 보내 채굴하는 것은 많은 어려움이 있으므로 탐사선에 시추 및 샘플링 장비를 부착하여 샘플을 채취하고 이를 연구해야 한다. 그러나 우주 행성은 지구와 환경이 매우 상이하고 한 번 채굴에 실패하면 돌이킬 수 없으므로 우주행성 시추 및 샘플링 기술은 매우 중요하다.
1970년 소련의 Luna 16은 달 표면의 35cm 깊이까지 채굴하여 101g의 달 토양을 지구로 가져오는 것에 성공했다(Magnani et al., 2006). 미국은 1961년 아폴로 계획을 통해 드릴을 사용하여 달 토양을 채취해 지구로 가져왔다. 최근에는 2020년 중국의 Chang’E-5 달 뒷면의 토양을 채굴하였으며, 2021년 퍼서비어런스(Perseverance)가 화성에 착륙하였고 최신기술들을 활용하여 화성 지반의 시료를 채취하고 지구로 보낼 계획이다(Farley et al., 2020; Li et al., 2022; Jayathilake et al., 2022). 더불어 일본의 하야부사 프로젝트는 2회에 걸쳐 기술적 난제를 극복하고 소행성에서 토양 시료를 채취하여 지구로 가져왔다(Watanabe et al., 2017).
본 논문에서는 우주 행성의 지구와 상이한 환경에서 지반 및 토양의 시료를 채취하기 위한 채굴 기술의 발전과정을 소개하며 현황을 정리하고 향후 기술이 나아가야 할 방안에 대하여 서술하였다. 또한, 후발주자인 우리나라 우주 행성 지반 탐사 기술 및 향후 발전과제에 대해 추가로 기술하였다.
2. 우주 행성의 환경
우주 행성의 환경은 극저온을 비롯한 극심한 일교차, 저중력, 운석충돌, 방사선 등의 문제로 인하여 지구에 비해 지반 탐사에 많은 기술적 어려움이 존재한다. 따라서 이를 극복할 수 있는 기술적 해결법을 모색하기 위해 대상이 되는 우주 행성의 환경을 이해하여야 한다. 2장에서는 탐사 목표가 되는 천체들에 대한 환경을 다루었으며, 이 환경이 어떻게 지반 탐사에 영향을 주는지에 대해 서술하였다.
2.1 달
달의 기압은 0.3 nPa로 거의 진공에 가까운 대기압을 갖고 있다. 따라서 장비 냉각과 시추공의 안정성을 위해 활용할 수 있는 유체가 없다(Knez et al., 2006). 과열된 장비는 토양의 정보를 왜곡할 수 있으며, 대기가 없으므로 달 표면 낮과 밤의 기온차가 200°C 이상으로 크기 때문에 시추 장비의 부품을 손상시킬 우려가 있다. 대기의 부재로 인해 운석충돌을 방지할 수 없으므로 미세한 운석충돌(Micrometeor)이 지속적으로 발생하여 달 표면에서 약 100m까지 지반이 불안정할 가능성이 높다(Taylor and Meek, 2005; Zhao et al., 2015). 이러한 지반 불안정성은 시추공정에 영향을 미칠 수 있다(Lore et al., 2000). 또한, 미세한 운석충돌로 인해 부서진 암석은 대기의 부재로 인해 풍화현상을 겪지 않아 매우 날카롭고 미세하다(Farries et al., 2021). 이 미세한 먼지로 인해 민감한 시추장비가 마모되고 고장 날 수 있으며 정전기로 인한 문제가 발생할 수 있다. 달의 중력은 지구의 1/6 수준으로 시추장비의 자중 감소로 인해 Weight on the bit(WOB)를 저하시켜 충분한 반력 확보에 어려움이 있으며 시추장비의 전력과 크기가 제한될 수 있다(Zhao et al., 2015).
2.2 화성
화성의 경우, 중력은 지구의 1/3이고 대기압이 0.5-1.0 kPa로 고진공 상태인 달과 달리 미미하지만 대기압을 갖고 있다(Zhao et al., 2008). 하지만 여전히 매우 낮은 대기압으로 유의미한 유체 활용이 어렵다(Knez et al., 2006). 따라서 여전히 장비의 냉각에 기술적 난제가 존재한다. 또한, 여전히 지구에 비해 낮은 대기압은 열 에너지를 저장하기에는 부족하여 화성의 적도부근 표면 온도는 -113 ~ 7°C로 달에 비하면 양호하지만 여전히 극심한 기온차이를 보인다(Zhang et al., 2021).
2.3 소행성
소행성은 달보다도 더 채굴에 가혹한 환경을 갖고 있다. 소행성 별로 매우 상이하지만, 소행성 이토카와의 중력 가속도는 대략 0.0001m/s이다. 이러한 저중력 환경은 WOB가 무의미하여 드릴 같은 자중을 이용한 채굴이 매우 어렵다. 또한, 대기가 사실상 존재하지 않기 때문에 유체를 활용한 장비 냉각도 힘들다. 따라서 후에 소개할 하야부사 임무에서는 소행성 표면을 발파하여 시료를 채굴하였다(Watanabe et al., 2017).
3. 우주 행성 지반 탐사 미션
서술한 우주 행성 환경에 이어 이를 극복하기 위하여 우주 행성에서 활용되어진 우주 행성 지반 탐사 기술들에 대해 서술하고, 향후 기술의 발전을 위한 과제와 그 방향에 대하여 서술하였다.
3.1 달
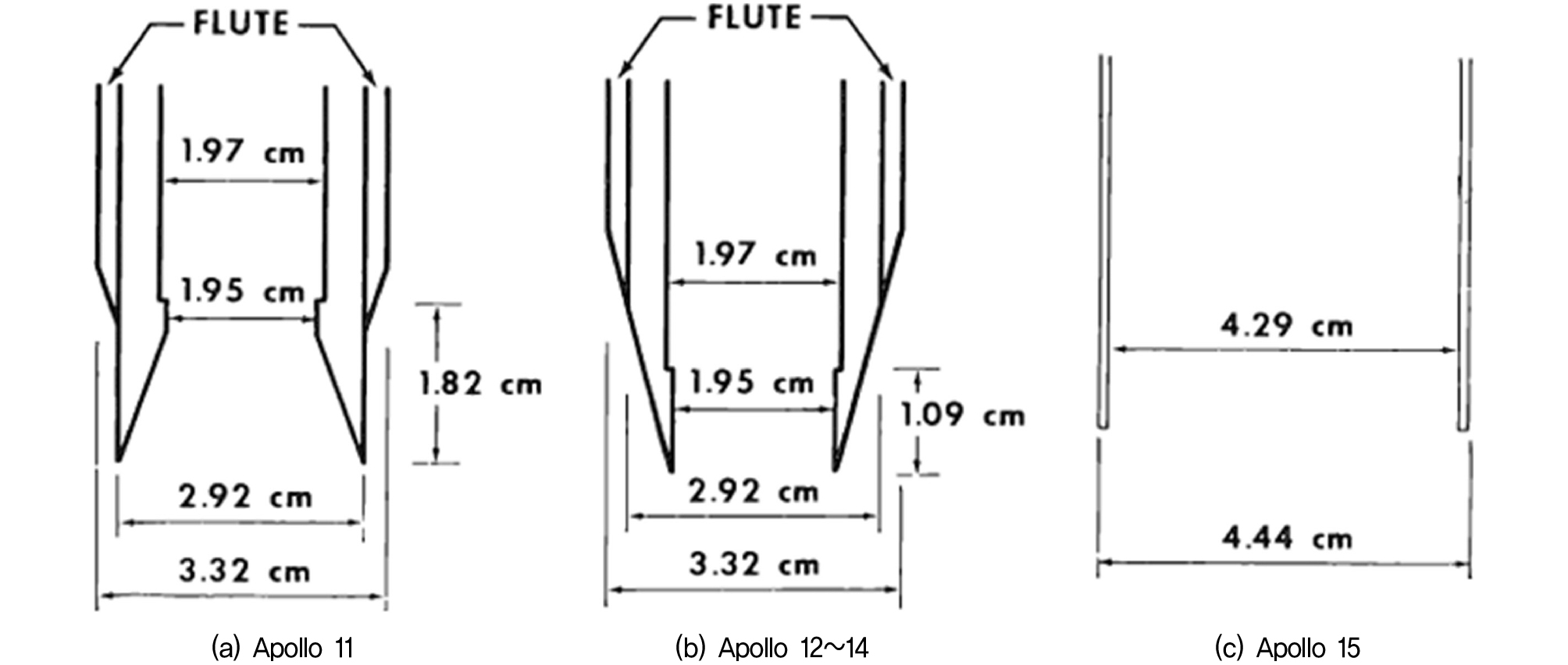
Table 1에는은 달 탐사 미션을 나열하였으며, Table 2에는 달 탐사 미션에서 활용된 드릴 장비의 스펙을 나열하였다. Apollo 11부터 13호 미션까지 우주비행사들이 직접 수동으로 달의 표토를 채취해 지구로 가져왔다(Knez et al., 2006). Apollo 11 미션에서는 우주비행사가 Reverse-flare 비트를 갖춘 코어 튜브를 15~20cm 달 표면에 삽입시켜 달의 표토 샘플을 채취하였다(Bar-Cohen et al., 2009). 하지만 Apollo 11 미션에서 사용한 Reverse-flare 비트의 형상(Fig. 1(a))으로 인하여 채취한 달 표토의 교란이 매우 심했다. 반면, Apollo 12~14 미션에서 활용한 비트의 형상은 Fig. 1(b)와 같았으며, 채취한 시료의 교란을 Apollo 11 미션에 비해 개선하였으나, 비트 벽의 두께가 매우 두꺼워 비트의 공간률(Area ratio)이 140%에 달했다. Apollo 15 미션에서 활용된 비트는 Fig. 1(c)와 같으며 비트의 직경은 Apollo 12~14의 비트에 비해 두배로 커졌고 공간률도 7.4%로 대폭 낮아졌다(Carrier et al., 1971).
Table 1.
Lunar exploration missions
Table 2.
Lunar exploration equipment comparison
| Mission name | Power (W) | Size (cm) | Weight (kg) | Nations | References |
| Apollo 15~17 | 430 | 58 x 24 x 12 | 13.4 | USA | Simmons, 1972 |
| Luna 16, 20, 24 | 140 | 69 x 29 (Tubes) | 13.6 | Soviet Union | Anttila, 2004 |
| Chang’E-5 | > 800 | Φ3.8 | 40 | China | Zheng et al., 2022 |
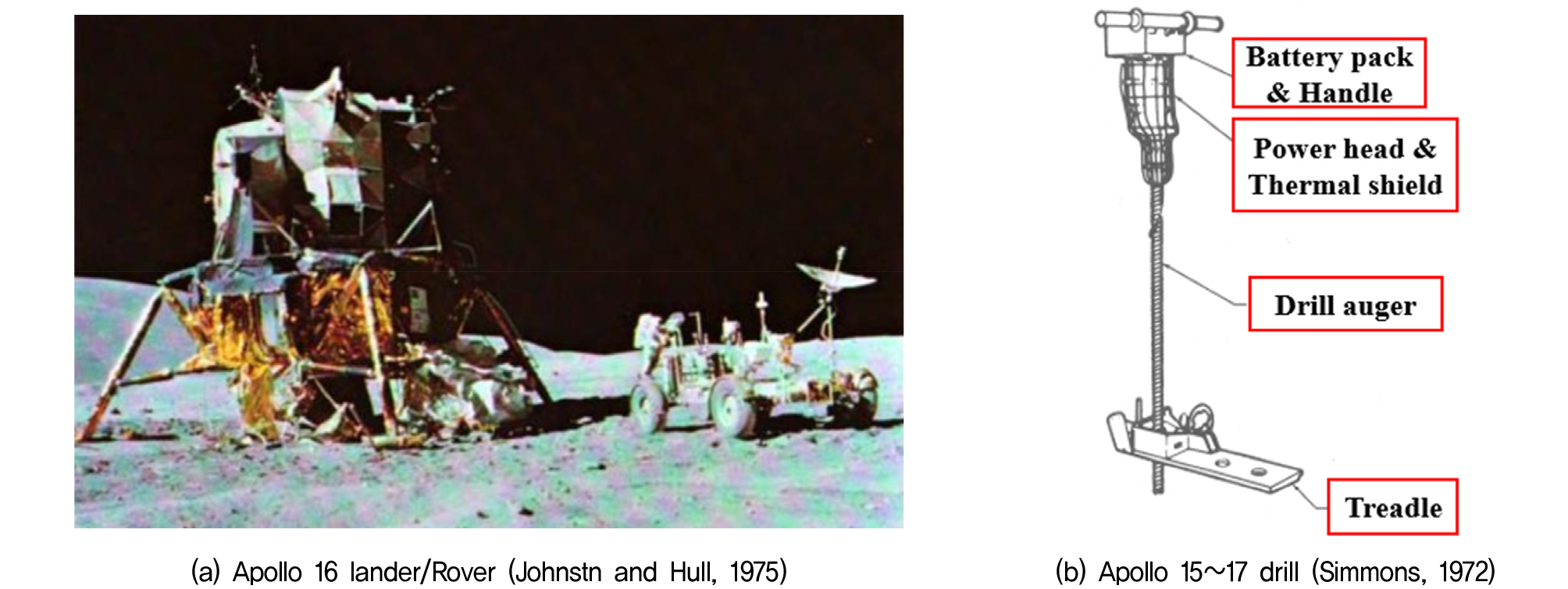
Apollo 15~17 미션은 드릴(Fig. 2) 이용해 달 표토를 채취하였다. 드릴의 자중은 13.4kg, 크기는 580 × 240 × 120mm이었으며 운용 전력은 약 430W를 활용하였다. Apollo 15의 드릴은 우주비행사가 복잡한 조립과정을 거쳐 운용하여야 했다. 우주비행사가 드릴을 조립하고 시추하다 원하는 깊이에 도달하면 플루트(Flut)를 제거하고 시료를 채취하였다. 오거(Auger)는 3m 길이로 약 940cm3 부피의 달 토양을 채취할 수 있었다. 이 때, 사용된 코어 튜브는 Apollo 15 미션부터 전 미션에서 사용한 것 보다 경량화 시켰다. 또한, Apollo 17 미션에서는 납 오염을 줄이기 위해 오거를 질산 처리하고 은 및 구리의 오염을 줄이기 위해 비트에서 브레이징 화합물을 제거하였다(Allton, 1989).
소련에서 실시한 LUNA 16 미션에서는 회전기능만을 장착한 드릴을 로봇 팔에 장착하여 달 표토 샘플을 채취하였고, LUNA 20 미션에서는 단단한 암석을 부수기 위한 충격장치가 포함되었다(Shi et al., 2014). 이들은 고정된 드릴 매개변수로 시추 과정을 수행해야 했으며, 이는 복잡한 달 환경에 적절하지 않을 수 있었다(Chen et al., 2016). 소련에서 마지막으로 실시한 달 표토 채굴 미션인 LUNA 24 미션에서는 드릴 장치에 기계적 방식의 자율 드릴링을 위한 적응형 메커니즘을 탑재하였다(Chen et al., 2016). 하지만 드릴 장비에 대한 부하로 인해 LUNA 24 미션에서 채굴 과정은 2번이나 재시작해야 했다(Shi et al., 2014; Chen et al., 2016).
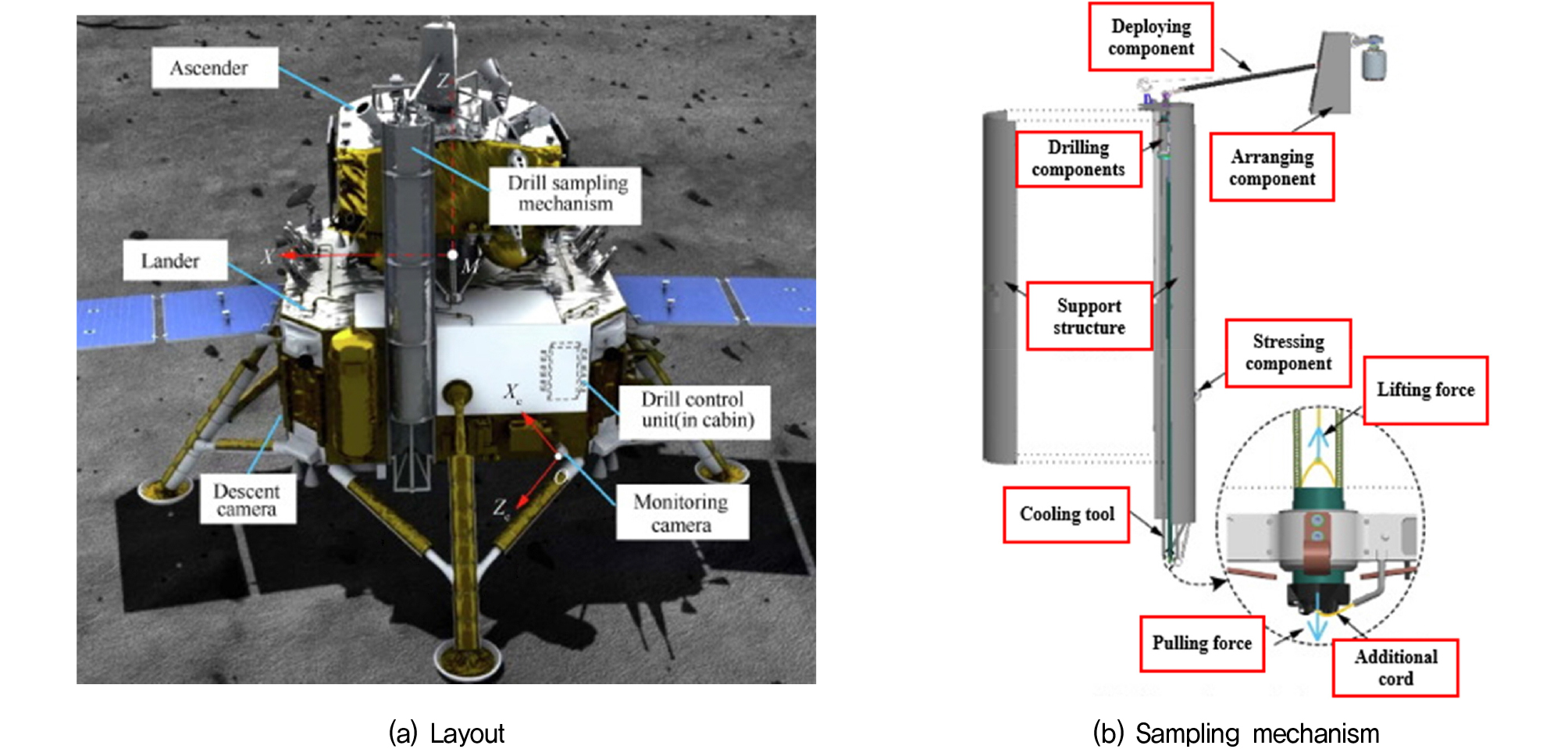
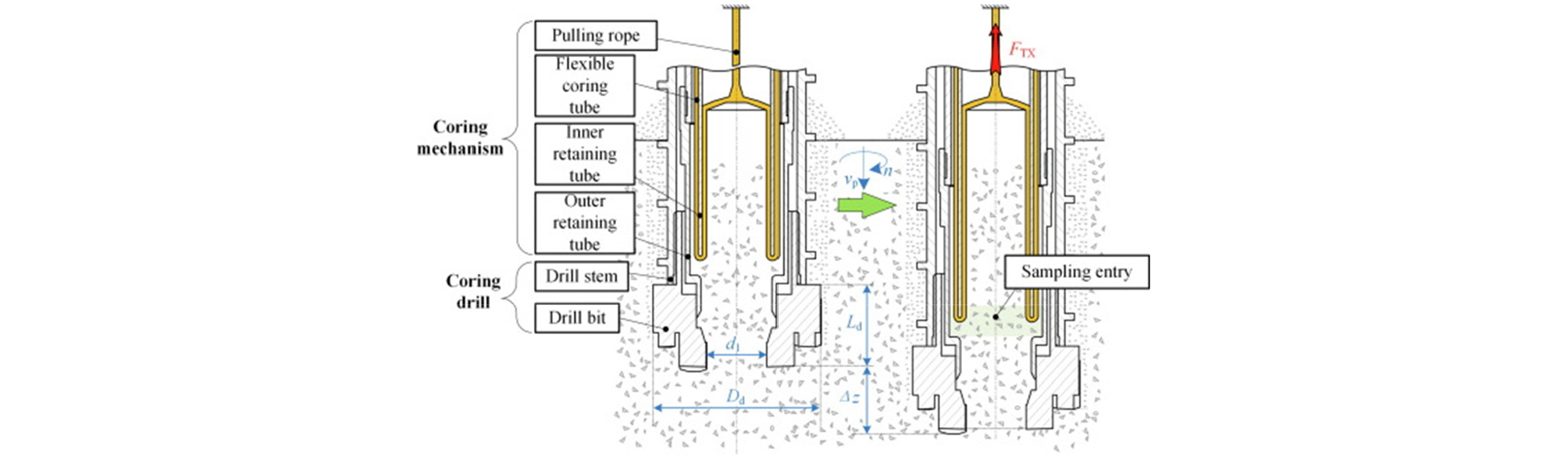
중국은 2020년 Chang’E-5를 발사하여 달에 착륙시켰다. Fig. 3은 Chang’E-5에 장착한 드릴 및 샘플링 장치를 도식적으로 나타냈다(Zheng et al., 2022). Chang’E-5의 드릴 시스템에 내장된 충격 모터와 회전 모터는 달의 표토를 절취 및 파쇄하는 작업을 수행하며, 정렬 모터를 배치하여 코어 드릴 공정 중에 양력을 제공함으로써 드릴 장치의 안정성을 향상시켰다. Chang’E-5의 드릴은 비트와 오거로 구성되며 내부 및 외부 고정 튜브 및 유연한 코어링 튜브 그리고 당김 로프로 구성되어졌다(Fig. 4). 드릴은 일정한 회전속도와 관통속도로 지면을 관통하며, 달 표토의 샘플이 채취되는 동안 유연한 코어링 튜브는 내부 고정 튜브로 뒤집혀 들어간다. 과정이 완료되면, 유연한 코어링 튜브는 드릴에서 당겨진다. 하지만 채굴과정 중 드릴 내부 벽과 내부 코어링 튜브 사이에 달의 표석 끼어 공정이 중단되었다(Linag et al., 2022).
3.2 화성
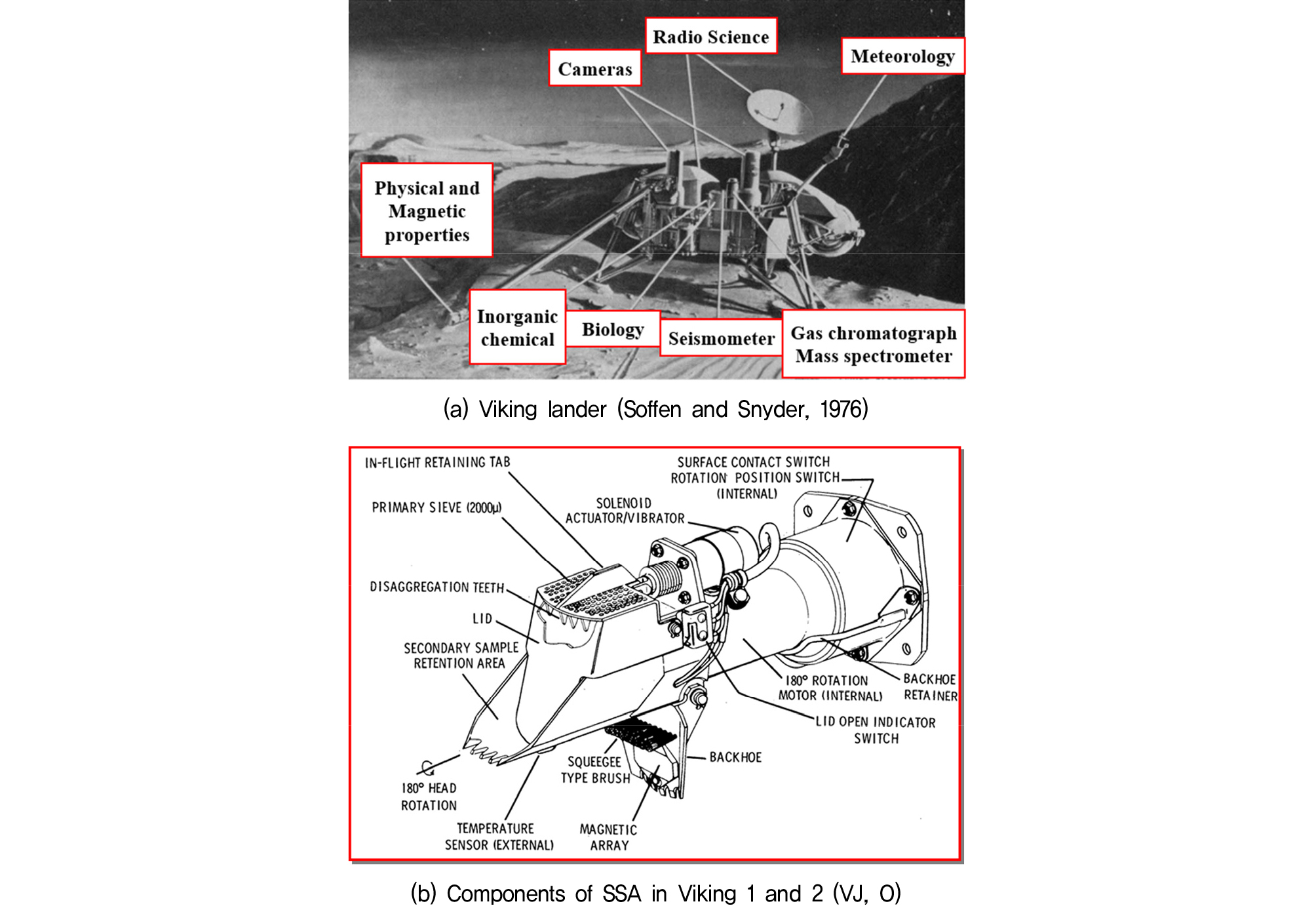
미국은 1976년 화성의 생명체 유무를 알아보기 위해 Viking 1과 Viking 2(Fig. 5(a))를 화성에 보내 화성 표토 시료를 채취하였다. 해당 미션에서는 탐사선에 SSA(the Surface Sampler Assembly)로 명명된 샘플러(Fig. 5(b))를 장착하고 수십 cm의 화성 표토를 긁어내어 착륙선에 장착된 기체 크로마토그래프 분석기기에 전달하도록 제작되었다. SSA의 끝에는 180° 회전 기능을 갖춘 Scoop 형태의 수집기가 있는 3m 길이의 Rolled-up tubular boom이 장착되어 있다. 솔레노이드로 작동되는 덮개, Backhoe, 수집기는 다양한 샘플을 채취 및 전달할 수 있도록 설계되었다. Backhoe에는 솔이 부착되어 채취하고자 하는 기반암의 표면을 솔질할 수 있었다(Zacny et al., 2013).
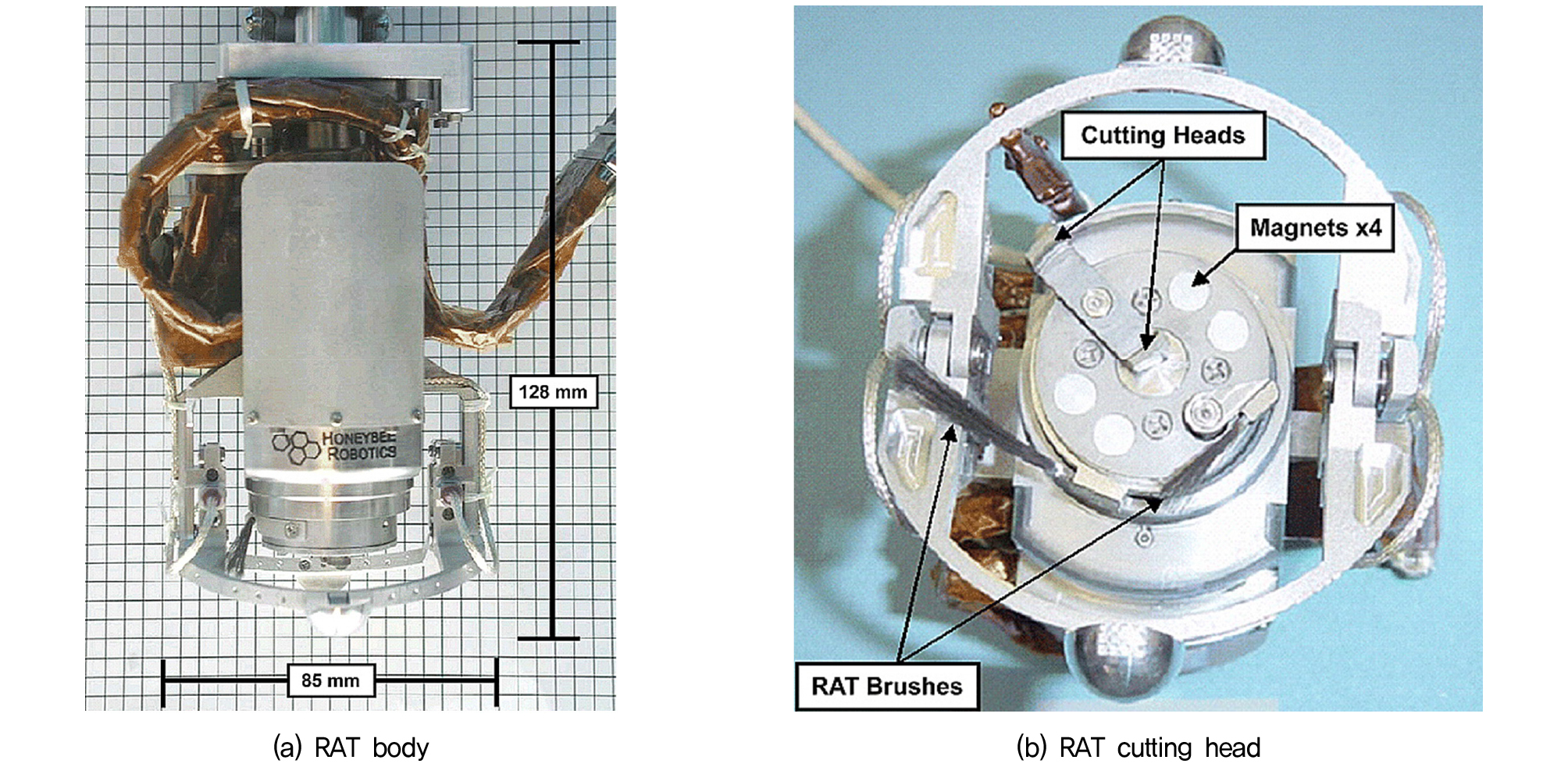
2003년 발사한 Sprit과 Opportunity에는 암석을 연마하는 장비인 Rock Abrasion Tool(RAT)을 가지고 암석 탐사를 수행하였다(Zhang et al., 2021). RAT은 길이 12.8cm, 직경 8.5cm의 원통 하우징에 3개의 모터로 구성되어 로버의 로봇 팔 또는 Instrument Deployment Device(IDD)에 장착되어 있었다(Fig. 6)(Gorevan et al., 2003; Thormson et al., 2013; Indyk et al., 2018). RAT의 연삭비트는 중심 축에 장착되어 연삭 모터를 통해 최대 3,000rpm으로 회전할 수 있고 회전 모터에 의해 중심 축에 대해 최대 2rpm으로 회전할 수 있으며 직경 4.5cm, 깊이 0.5cm의 마모 면을 암석에 형성할 수 있다(Thormson et al., 2013).
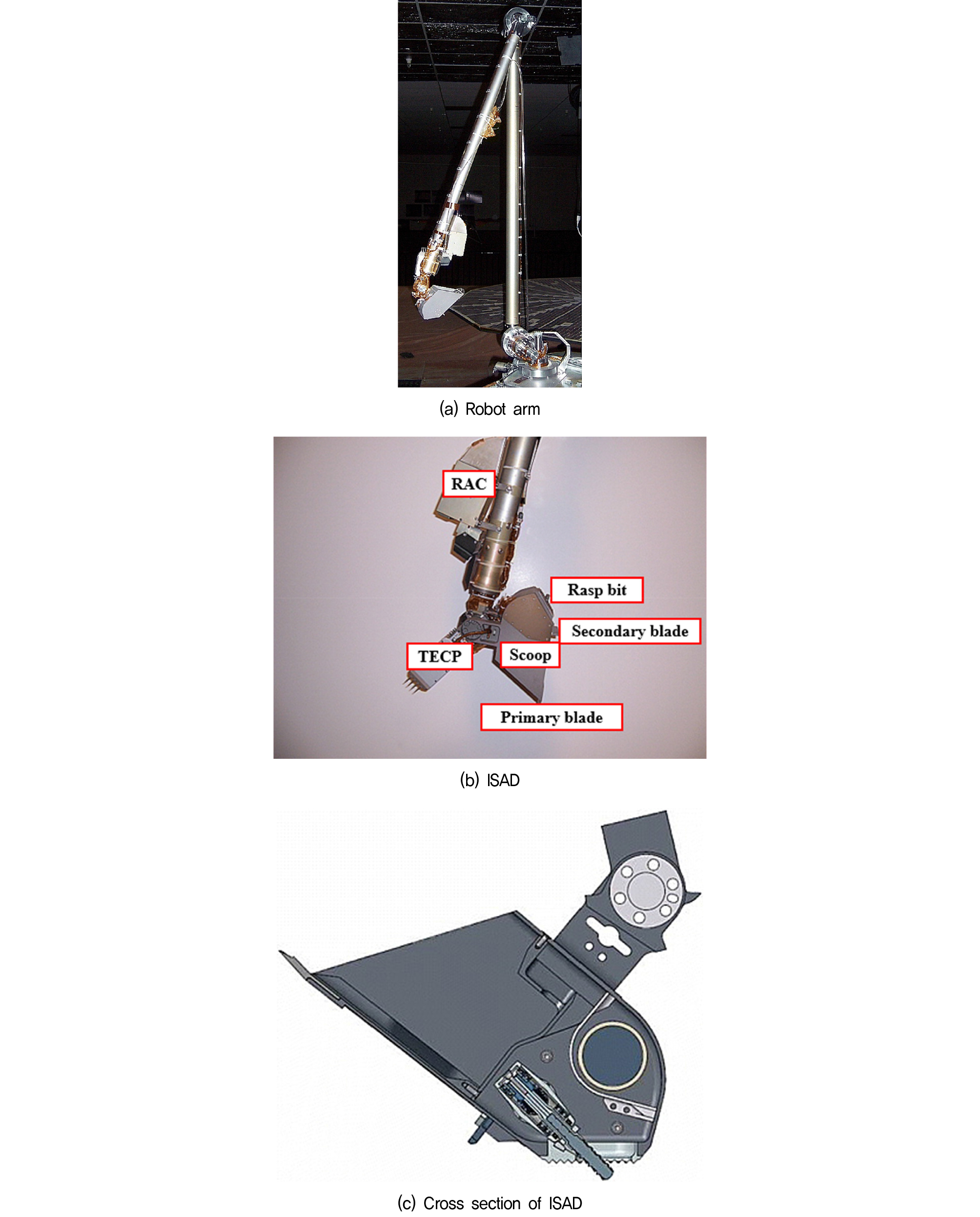
2007년 발사된 Phoenix는 화성 북극에 착륙하여 땅을 파고 과거의 물에 관한 정보를 탐사했다(Cull et al., 2010). Phoenix에 로봇 팔과 얼음 토양 수집장치(Associated Icy Soil Acquisition Device, ISAD) 장착되어 화성의 토양을 채취하였다. Fig. 7은 Phoenix의 착륙선이고 Fig. 8은 ISAD는 Phoenix에 장착된 로봇 팔과 ISAD다. 토양을 긁어내기 위한 1차 및 2차 블레이드를 포함하는 Scoop과 얼음 토양을 얻기 위한 줄(Rasp)로 이루어졌다(Bonitz et al., 2007). 로봇 팔은 손목에 장착된 ISAD와 Thermal Electrical and Conductivity Probe(TECP)로 구성되었다. 로봇 팔은 어깨 방위각, 어깨 높이, 팔꿈치, 손목 피시에 대한 움직임을 제공하여 4의 자유도를 갖는다. ISAD는 전면에 티타늄 재질의 날을 갖춘 Scoop와 Scoop 바닥에 텅스텐 재질의 카바이드 스크레이퍼 날, 후면에는 줄로 구성되었다. Scoop는 티타늄 재질의 날에 의해 굴착된 토양을 수용하는 앞방과 갈고리를 수용하는 뒷방으로 나뉜다. 두 챔버는 샘플 전송을 위한 플레이로 분리된다. 전면 챔버는 티타늄 재질의 블레이드로 화성 표면을 긁거나 화성 표토를 채취하는데 활용되며, 수집된 재료를 슬롯(Slot)으로 수송하는 깔대기가 포함되어 샘플 Dropoff 기능이 향상되도록 설계되었다. ISAD의 Scoop과 깔대기는 높은 내마모성 아노다이징(Anodizing) 처리된 알루미늄 재질로 제작되었다. 또한 텅스텐 카바이드(Tungsten cabide) 날은 티타늄 재질의 날보다 더 단단한 암석을 관통할 수 있게 설계되었다(Bonitz et al., 2008; Arvidson et al., 2009).
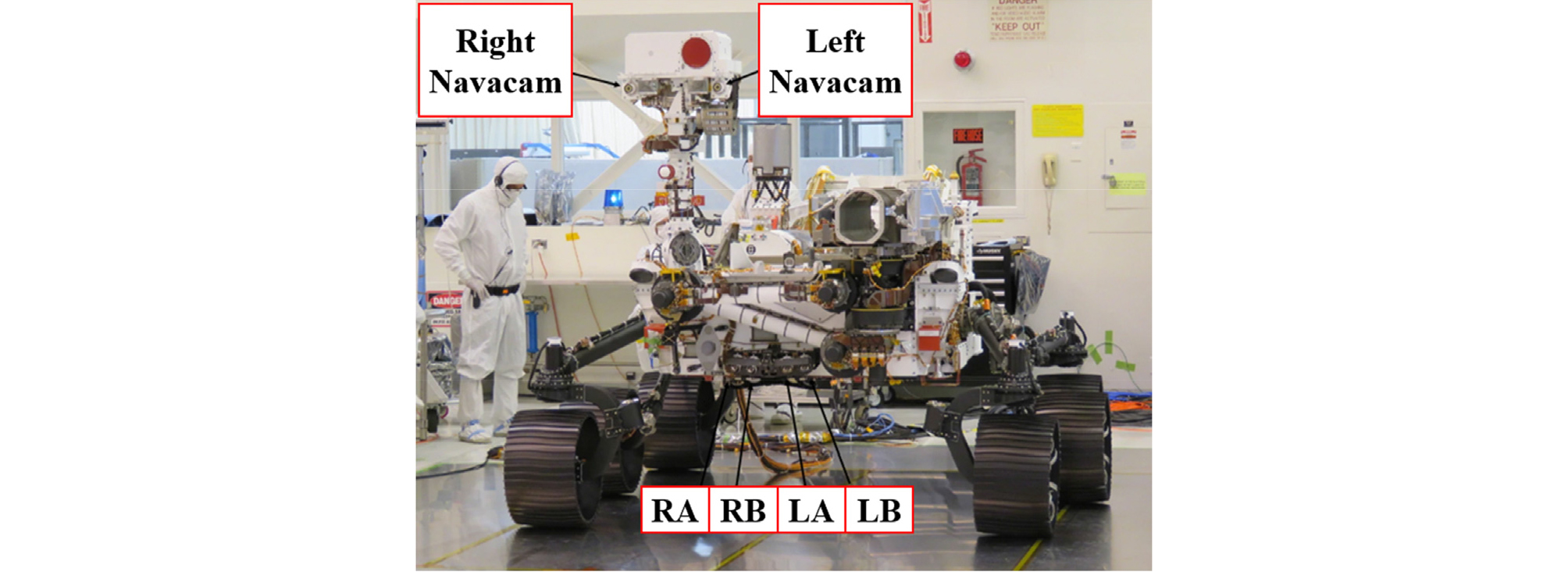
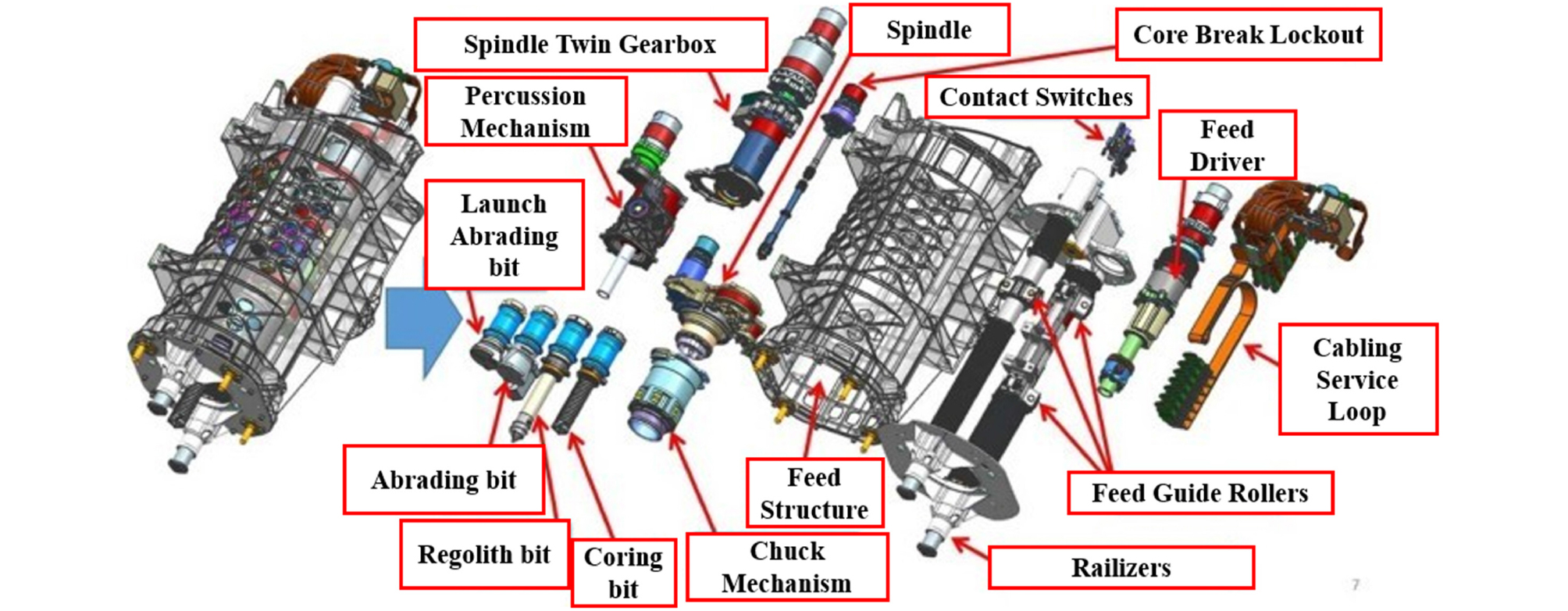
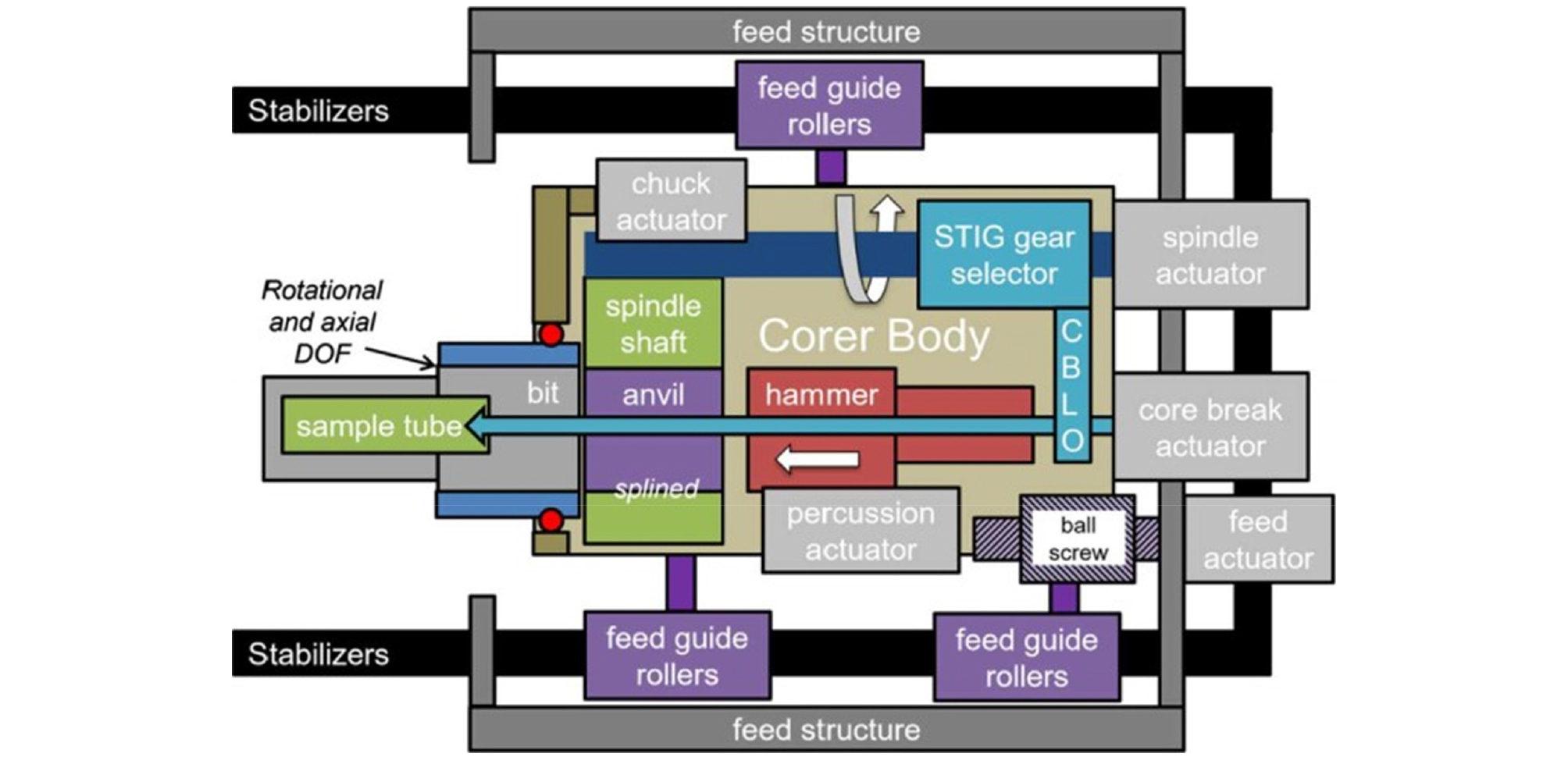
2020년 발사하여 2021년에 화성에 착륙한 화성탐사 로버 퍼서비어런스(Perseverance)는 현재도 화성탐사 미션을 수행 중이며 지금으로서는 가장 최신 기술들이 탑재되어 있다. Fig. 9은 퍼서비어런스 착륙선이고 Fig. 10은 퍼서비어런스에 장착된 코어(Corer)의 구성을 나타냈다. 드릴 코어를 채취하기 위한 코어는 회전 및 충격식 암석 드릴링 매커니즘으로 설계되었다. 이는 5개의 엑추에이터 구동 장치(Chuck, Spindle, 충격장치, Spindle Twin-Input Gearbox(STIG), Core Break Lockout(CBLO), Feeder)로 구성되었다. 해당 매커니즘은 안정기, 접점 스위치, 공급 가이드 롤러 및 코어 전면의 4개의 도킹 포스트와 결합하여 코어 내부를 형성하고, 코어 내부에는 Feeder가 설치되어 있다. 여러 비트들은 샘플 처리 및 캐싱 기능을 담당하는 적응형 캐싱 어셈블리 내에 저장되어 퍼서비어런스는 상황에 맞는 비트를 선택할 수 있게 설계되었다. Fig. 11은 코어의 아키텍쳐를 나타냈었다. 명목상 채굴 중 Spindle 속도는 코어링의 경우 200rpm이고 연마의 경우 37rpm이며 WOB는 80-120N이다(Moeller et al., 2021).
3.3 소행성
미국은 1999년 발사된 Stardust호는 빌트 2 혜성의 먼지를 채집하여 지구로 보내는 미션을 수행하였다. Stardust호에는 Sample canister가 탑재되어 채취된 시료를 보관하고 내부에 지구 대기압과 같은 기압조건을 만들어 지구에서 개봉 시 시료의 오염을 방지하였다(Tsou et al., 2003). 또한, 에어로겔(Aerogel) 포획 장치를 활용하여 시료를 채취하였다(Tsou et al., 2003). 이는 혜성에 착륙하여 채굴과정을 거친 것이 아니라 우주공간에 흩뿌려지는 혜성의 구성물질을 낚아챈 것이다(Sandford, 2011).
일본에서는 2003년 하야부사(Hayabusa, Fig. 12(a))가 소행성(Asteroid) Itokawa의 샘플을 수집하기 위해 발사되었다. 최초로 시도된 해당 미션에서는 지속적인 기기 고장으로 인한 많은 우여곡절 끝에 소행성 Itokawa에 도달했다. 도달 후에도 착륙과정에서 오류로 인해 착륙 후 다시 이륙하는 등의 어려움이 있었고 이 과정에서 소행성 표면 탐사선 미네르바(MINERBAR)를 소실하였다(Kawaguchi et al., 2008). 하야부사 미션에서 원계획은 소행성의 작은 중력으로 인해 채굴장비를 사용하기 어렵기 때문에 쇠구슬을 쏘아 소행성 Itokawa에 명중시키고 부서진 파편을 수집할 계획이었다(Kunota et al., 2006). 하지만 탄환이 발사되지 않은 것으로 추정되어 실패한 것으로 판정되었다(Yano et al., 2006). 따라서 시뮬레이션을 통해 하야부사가 소행성에 착륙할 때 충격량을 계산하고 그에 따라 착륙속도를 정하여 착륙시 충격으로 부서진 파편을 수집하였다(Yano et al., 2006).
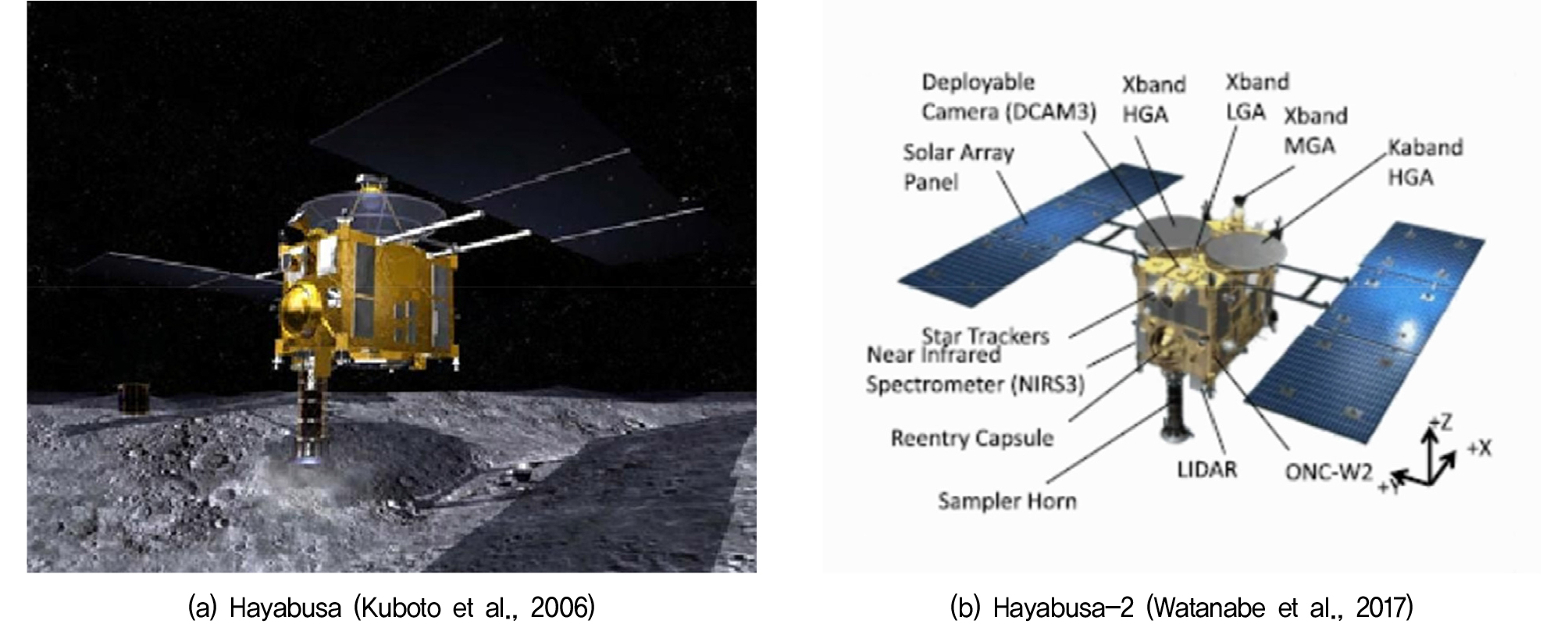
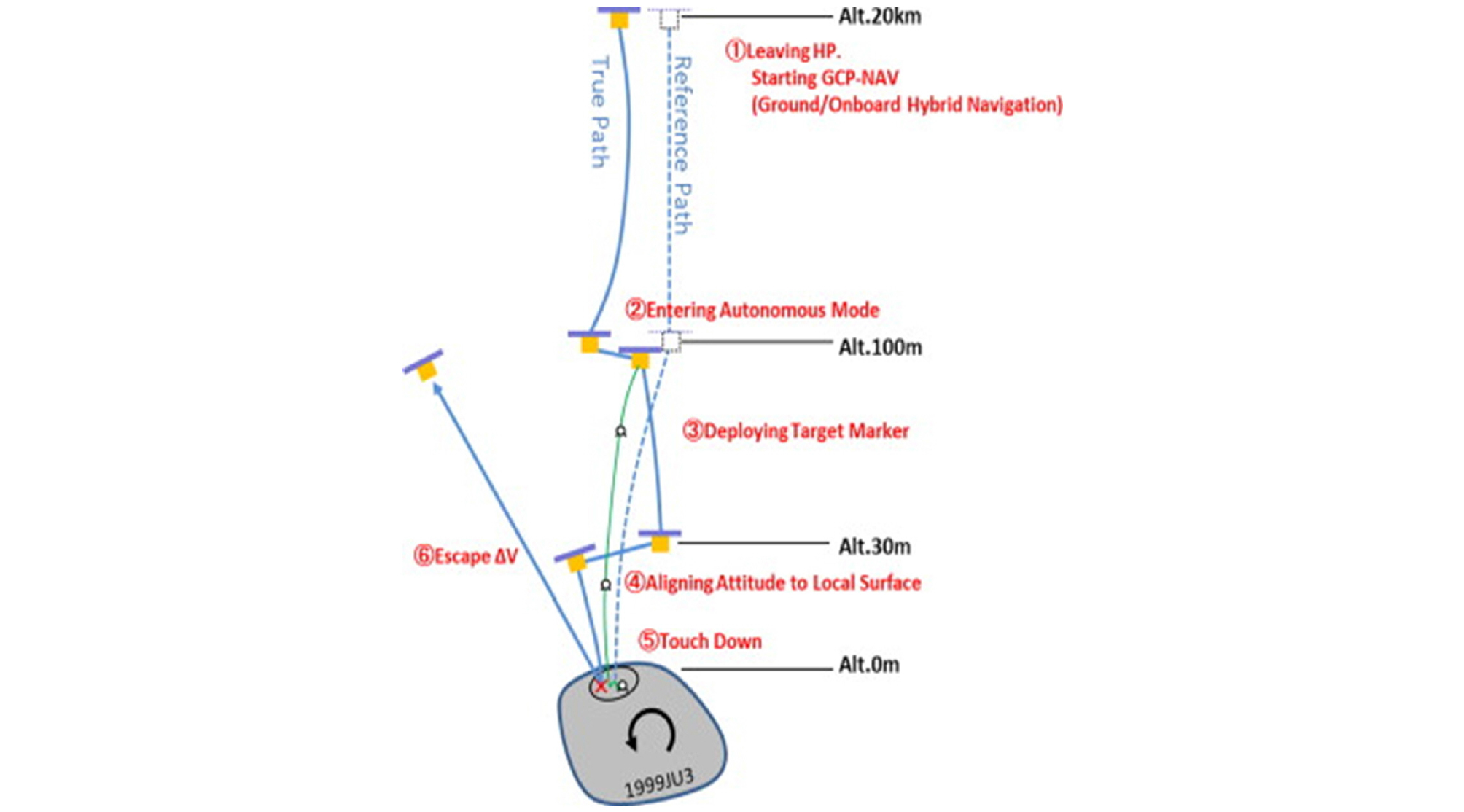
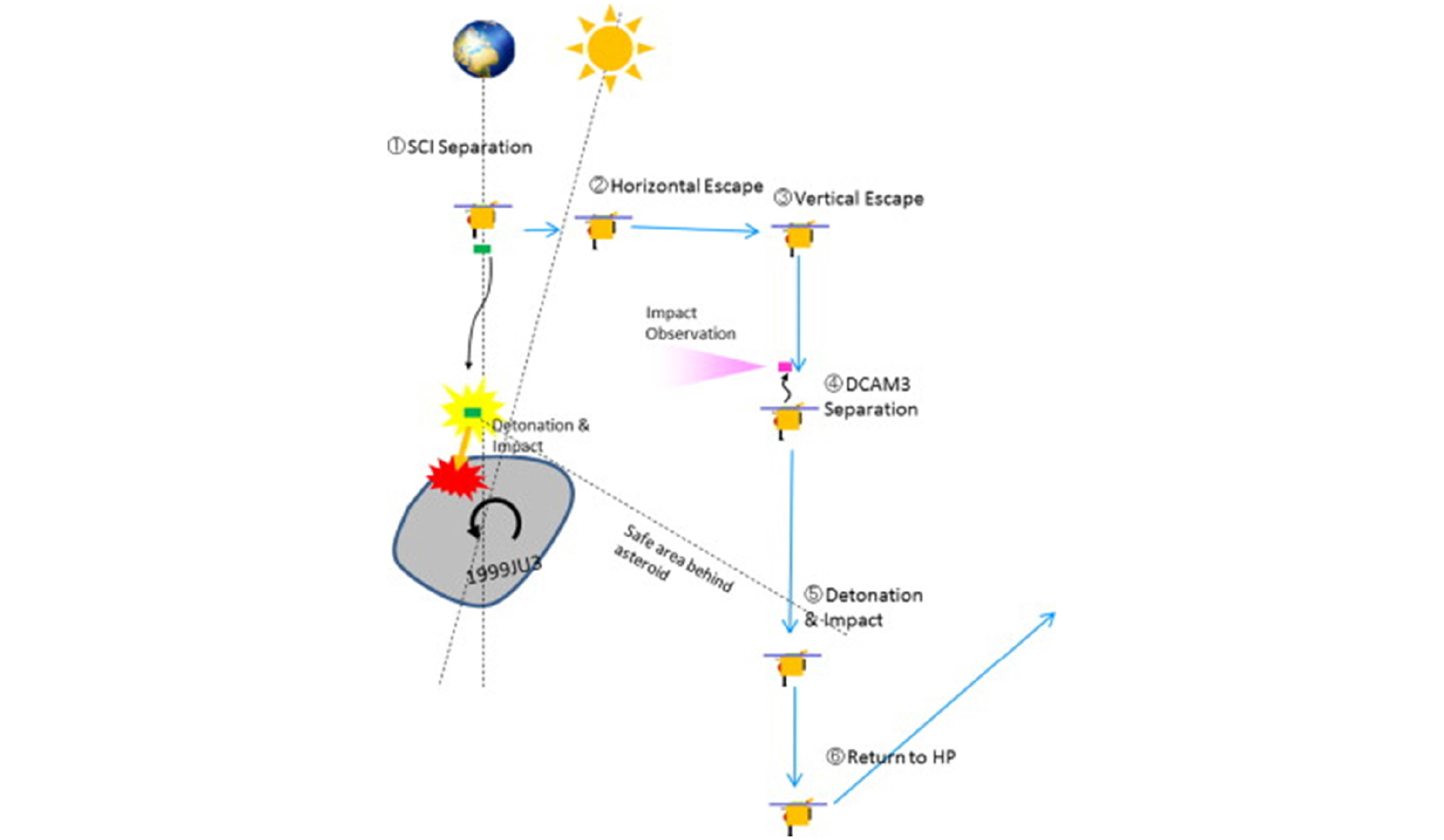
일본은 하야부사 미션 성공 후 하야부사-2(Fig. 12(b))를 소행성 162173를 향해 2014년 발사하였다. Fig. 13은 하야부사-2의 샘플링 과정을 도식적으로 나타냈다. 하야부사-2는 수직하강 속도를 0.1-1m/s로 제어하며 소행성으로부터 고도 100m까지 접근한다. 이 때 고도 500m 이상에서 Small Carry-on Impactor로부터 작은 폭탄이 발사되어 크레이터를 만든다(Fig. 14). 여기서 폭발물이 원뿔 모양으로 성형작약 되어 있는 약 2kg의 폭탄은 최소 2km/s 이상의 속도로 발사되었다. 그 후 자세를 제어하며 착륙하여 샘플을 채취하였다(Tsuda et al., 2013; Saiki et al., 2017).
3.4 기술전망
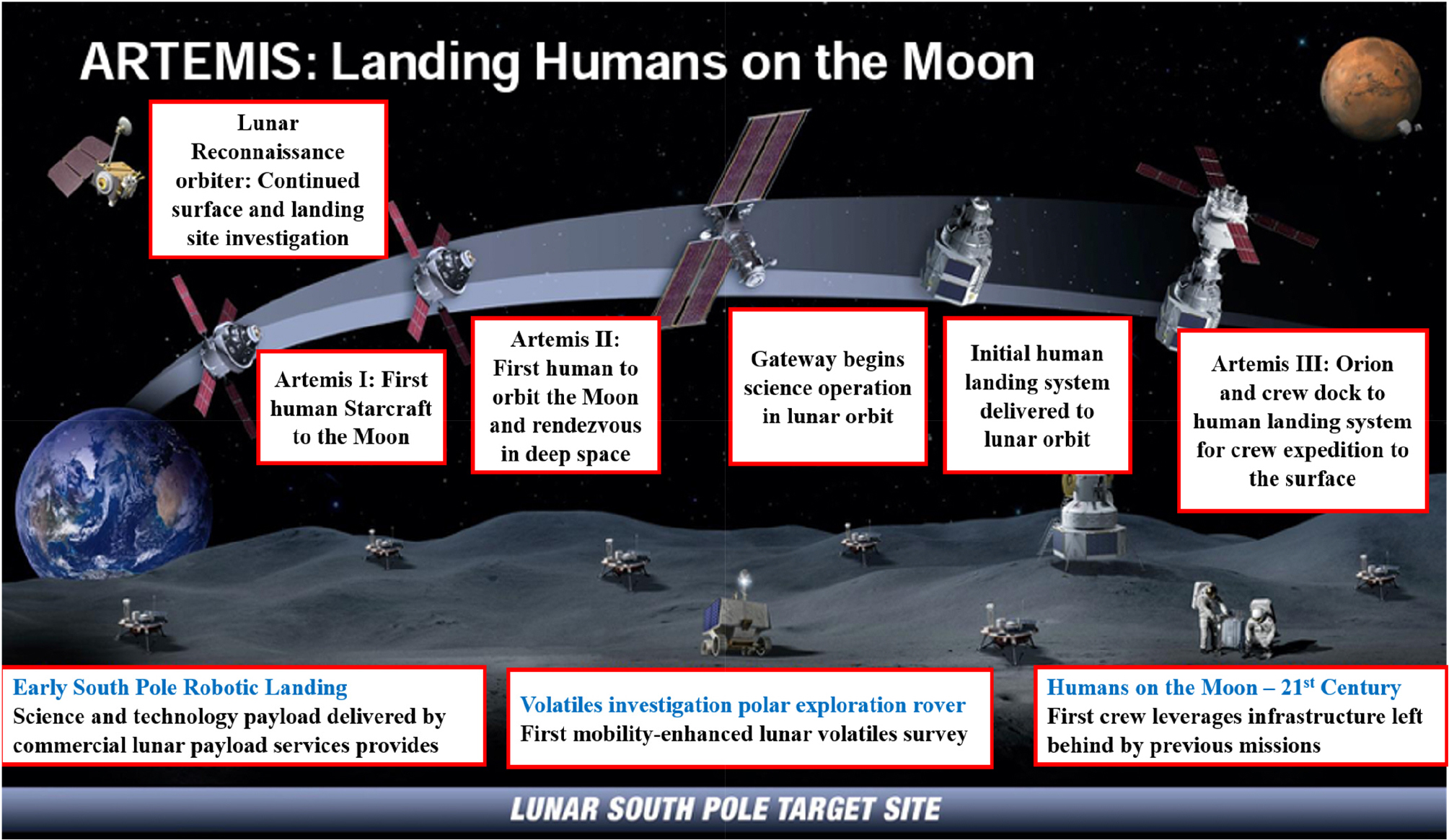
현재 NASA를 포함한 여러 국가 우주기구가 참여하여 달에 대한 유인탐사계획인 아르테미스(Artemis) 미션이 준비 중이며, 2021년 우리나라도 10번째 참여국이 되었다. Fig. 15에서는 아르테미스 미션의 계획을 간략하게 표현하였다(Hawkins, 2021). 아르테미스 미션에는 향후 달의 자원 탐사 및 과학적 임무 수행을 위한 장기 유인 달 탐사 지원용 달 기지 건설계획이 포함되어 있다(Cristello and Otero, 2022). 달 유인탐사를 위해서는 보다 자세한 자원분포를 포함한 지반 정보가 필수적이다. 하지만 과거의 달 탐사 미션에서 획득한 지반정보는 달의 표토에 대한 정보에 집중되어 있다. 따라서 향후에는 보다 깊은 지하의 시료를 채취하여 지반정보를 획득함으로써 달 기지 설계에 반영할 수 있도록 하고, 물이나 헬륨-3와 같이 인류 거주를 지원할 수 있는 자원 분포를 확인하여 장기 유인탐사 지원을 위한 자원 정보를 획득해야 한다(Bennett et al., 2020). 이를 위하여 보다 깊은 지하를 탐사하기 위한 장비를 개발할 필요가 있으며, 동시에 시료의 교란을 최소화할 수 있는 방법을 강구해야 한다.
최근 화성에서 액체 상태의 물을 발견하였고, 따라서 생명체 존재 가능성이 대두되고 있다. 하지만, 대기가 얇고 자기장이 매우 약한 화성의 특성상 지표에서 생명체를 찾기는 어려울 것으로 예측되고 있다(Michalski et al., 2018). 따라서 생명체 발견 및 자원 탐사를 위해 보다 깊은 지하를 탐사할 필요가 있다. 달과 마찬가지로 보다 깊은 곳을 탐사할 수 있는 장비를 개발하고 향후 미래에 화성 장기탐사를 위한 지반정보 획득을 위해 역시 시료의 교란을 최소화할 수 있는 방법을 강구해야 한다.
달, 화성, 소행성만이 아니라 다양한 우주 행성의 지반을 탐사하기 위해서는 다음과 같은 장비의 개량 및 개발이 필요하다. 지구로부터 거리가 멀어질수록 더욱 장비의 경량화가 필요하다. 또한, 적은 공간에 적재 가능하도록 장비의 장치들을 고집적 되도록 제작하여야 하며, 추가적인 전원장치로부터 전원 공급이 불가능하므로 고효율 및 저전력 기능을 갖추어야 한다. 더불어 한 번 장비를 우주로 발사하면 회수 및 수리가 불가능에 가까움으로 장비의 신뢰도를 향상시키고 우주 행성 환경에 영향을 덜 받을 수 있도록 개발해 나가야한다.
4. 대한민국 우주 자원 탐사 기술 동향
현재 우리나라는 우주 행성 자원 탐사 계획은 달에 국한되어 있다. 2007년에 1차 우주개발 진흥 기본계획을 수립하였으며, 2011년에는 2차 우주개발진흥 기본계획을 발표하고, 2020년 3차 우주개발진흥 기본계획을 발표하였다. 3차 우주개발진흥 기본계획에 따르면 2030년 착륙선을 달에 보낼 계획이며, 향후 추가적인 탐사를 수행할 계획이다(Science and Technology Policy Institute, 2019). 그리고 2022년 시험용 달 궤도 탐사선을 NASA와 협력하여 발사할 예정이다(Korea Institute of Construction Technology, 2021). 2030년 쏘아 올리는 달 착륙선에는 한국형 차세대 발사체가 사용될 예정이다. 현재 NASA는 6~8기의 달 착륙선을 보내 달의 지질학적 역사 및 내부를 탐사하기위한 프로젝트인 국제 달 탐사 네트워크(International Lunar Network, ILN)에 참여할 것을 제안하였다(Korea Institute of Construction Technology, 2021). 이에 맞춰 우리나라는 최근 한국형 발사체인 나로호가 성공적으로 발사되었고, 7대 우주강국으로서 Space Club에 이름을 올렸다.
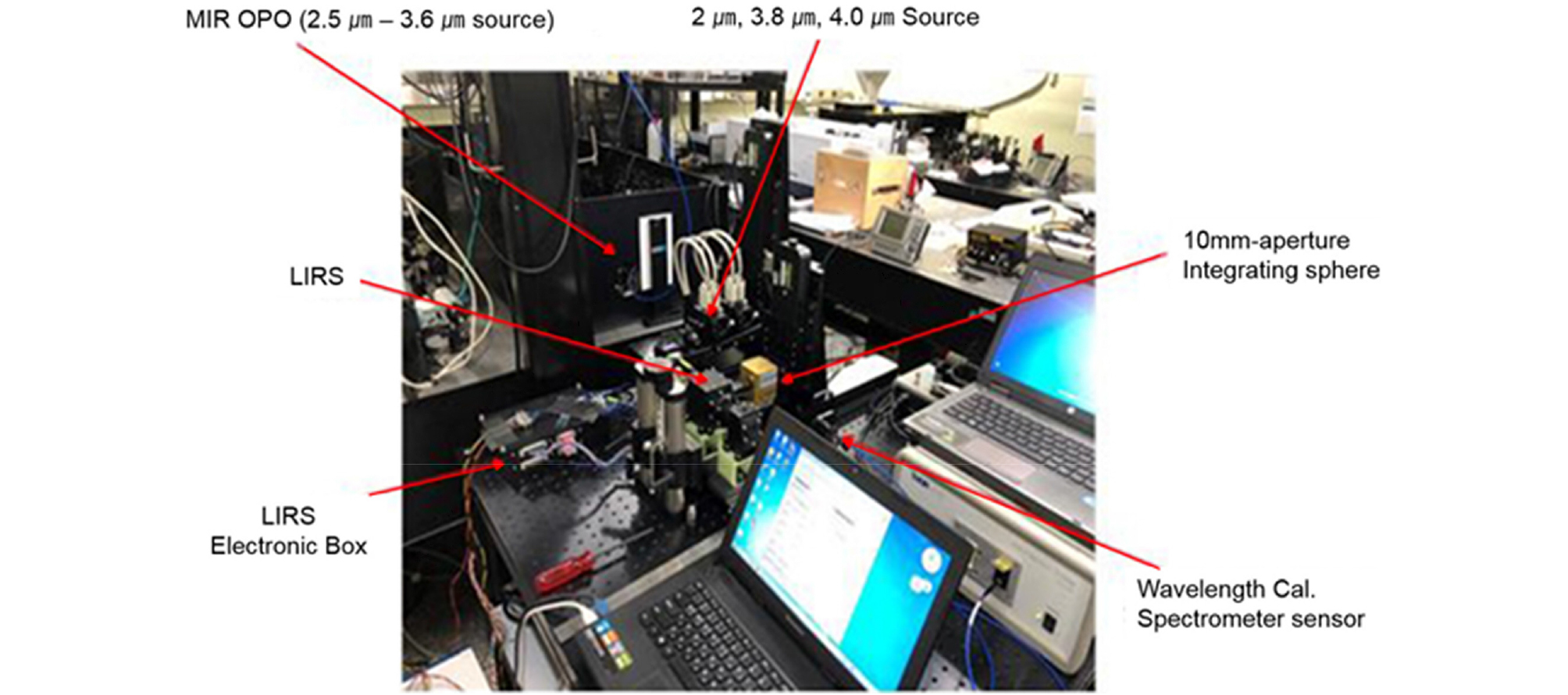
이러한 정부계획과 세계추세에 맞춰 현재 정부출연연구소 및 산᛫학연을 중심으로 달 자원 탐사 연구를 수행 중이다. 한국항공우주연구원은 차세대 한국형 발사체와 달 착륙선을 개발 중에 있고(Hwang et al., 2021). 한국천문연구원은 한국형 2022년 발사되는 달 궤도선 다누리에 중적외선(Mid-Infrared) 분광기(Fig. 16)를 싣고 이를 활용하여 고위도 지역에 존재할 것으로 판단되는 물의 존재 유무 및 분포를 탐사하는 것을 목표로 하고 있으며(Pack et al., 2015), 한국지질자원연구원은 감마선 분광기, X선 분광기, 중성자 분광기를 개발해왔고, 달 궤도선 다누리에 감마선 분광기를 설치하여 달 표면의 원소 분포를 조사하고, 달 지질/자원분포 등을 조사할 예정이다(Kim, 2022). 하지만 광학적인 간접적 데이터만으로는 지하자원의 분포를 정확하게 파악할 수 없어, 결국 시추장비를 통해 시료를 채취하여 직접적인 성분분석이 필요하다(Carrier et al., 1976; Perko, 2007). 따라서 광학적으로 얻은 데이터를 바탕으로 달 표면을 시추하여 샘플을 채취하고 이를 분석하여야 한다.
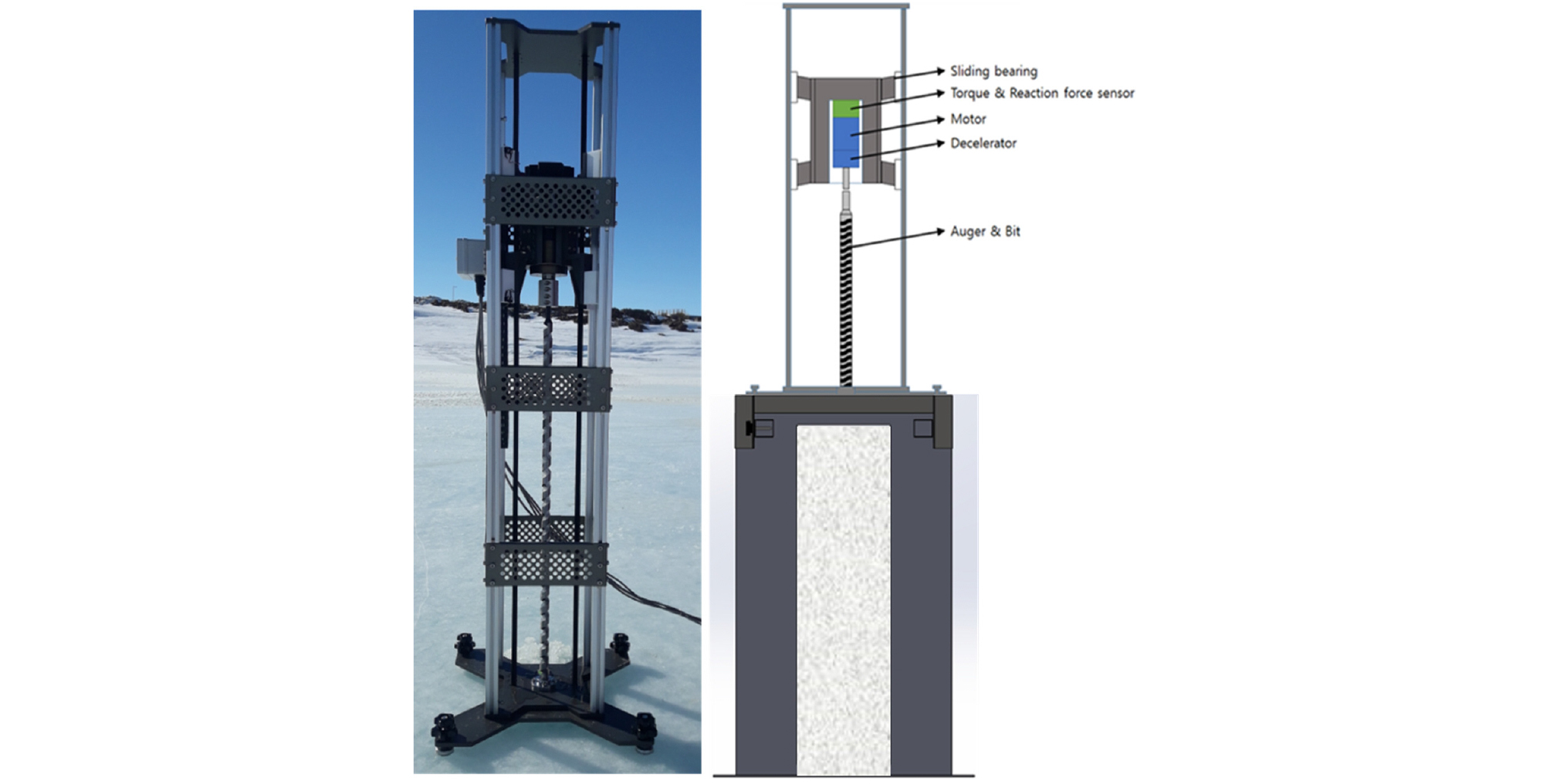
이에 한국건설기술연구원은 단 한 종의 비트만을 활용하여 모든 지반을 시추할 수 있는 우주 행성 시추 장비 및 활용 기술을 개발 중에 있다(Fig. 17)(Korea Institute of Construction Technology, 2021). 해당 시추 장비는 구동체와 회전체로 구성되어져 있고 오거는 정밀제어를 위해 감속 기어비가 1:230인 46.6의 엔코더 결합형 유성감속 DC 인덕션 모터(Induction motor)를 장착하여 회전된다. 드릴 비트를 회전시키는 모터는 24 V, 2,850A의 출력으로 3,550rpm의 정격 회전수에 맞춰 구동되어진다(Korea Institute of Construction Technology, 2021). 더불어 한국건설기술연구원은 달 환경을 모사할 수 있는 실대형 지반열진공챔버(50m3, 10-2~10-4mbar, -190~150°C)를 구축하여 달 자원 탐사 기술 개발을 위한 연구 수행 플랫폼을 갖추고 있으며, 대량 생산 가능한 월면토 모사체인 KLS-1을 개발하여 관련 연구에 활용하고 있다(Ryu et al., 2018; Korea Institute of Construction Technology, 2021; Kim et al., 2021). 또한, 더 세밀한 달 환경 모사를 위하여 월면토 모사체를 대전시키는 연구를 진행하고 있다.
하지만, 우리나라는 아직 선진국들에 비하면, 아직 우주 행성 자원 탐사 기술은 매우 미약한 편이다. Table 3은 각 국가별 수행된 달 탐사 미션과 계획을 나타냈다(Ministry of Science and ICT and National Research Foundation, 2020). 미국은 이미 1970년대에 Apollo 미션을 통해 인류를 달에 보내는데 성공하였으며, 소련은 그보다 앞선 시기인 1957년에 인류 최초의 인공위성을 발사였고, 1961년에는 우주 비행을 성공시켰다. 또한, 두 국가는 여러 차례의 생물체 우주 비행을 통해 유인 탐사를 위한 생체 정보를 획득하였다. 일본의 경우, 달 궤도 탐사선 셀레네(Selene)를 2007년 발사하여 달에 대한 과학적인 데이터 획득 임무를 수행하였다(Hashimoto et al., 2014). 반면, 우리나라는 2022년에 달 궤도선 다누리를 발사하고 2030년이 되어서야 달 착륙선을 발사할 예정이기에 현재 우주 행성 지반 탐사 데이터는 선진국에서 공개한 정보에 국한되어 있다. 따라서, 가속화되는 우주 개발 기술 경쟁에서 뒤쳐지지 않고 아르테미스 미션에서 주도적인 역할을 하기 위해서는 향후 달 착륙선에 시추 장비 및 로버를 탑재하여 이에 대한 데이터를 수집할 필요가 있으며, 향후 유인 우주 탐사 지원을 위한 자원의 분포를 파악할 필요가 있다.
Table 3.
Comparison of lunar exploration performance and plans for each country (Ministry of Science and ICT, and National Research Foundation, 2020)
5. 결 론
본 논문에서는 현재까지 수행되었던 우주행성 채굴 미션에 대해 알아보았다. 비록 1970년대부터 인류의 우주행성에 대한 채굴 탐사가 이루어져 왔지만, 경제적인 문제로 인해 오랜 기간 동안 탐사는 침체되었다. 하지만 최근 다시 우주 개발에 대한 수요가 늘어나면서 많은 선진국들이 우주행성에 대한 채굴 탐사 기술을 개발하고 있다. 특히, 달이나 화성에 인류가 거주할 수 있는 기지를 건설하는 것이 최우선 목표로 설정되어 있다.
현재까지 이루어진 우주행성에 대한 채굴 방식은 시료의 교란이 심해 지구로 반환하여 분석을 진행하여도 해당 우주행성의 지반에 대한 정확한 정보를 얻기 힘들다. 또한, 우주 행성의 표토를 채취하였지만, 채굴 깊이가 얕아 우주 행성 자원에 대한 심도 있는 연구가 불가능하다. 따라서 차후 우주행성이 인류가 거주가능한 기지를 건설하고자 한다면, 정확한 설계를 위해 비교란 시료를 얻을 수 있는 기술 개발과 유인 탐사 지원을 위한 자원 획득을 위해 보다 깊은 깊이의 채굴 기술이 필요할 것으로 예상된다. 더불어 장비의 소형화, 고효율, 저전력, 경량화 및 신뢰도향상에 대한 연구개발이 향후 필요하다.
현재 대한민국은 우주 개발을 시작하는 단계이다. 따라서, 선진국과 기술경쟁을 하기 위해서는 위와 같은 기술들에 대한 집중적인 투자가 필요할 것으로 예상된다.
