

1. 서론
2. 야지궤도차량 구동 시 지반침하 및 지반저항력
3. 모형궤도시험 조건 및 방법
3.1 모형시험 장비
3.2 모형지반
3.3 모형시험 방법 및 계획
4. 모형궤도시험 결과 및 분석
4.1 지반-궤도 접지면 파괴형상
4.2 슬립침하-슬립율 관계
4.3 정규화 된 슬립침하-슬립율 관계
5. 야지궤도차량 슬립침하 평가 식 제안
6. 결 론
1. 서론
궤도차량이란 궤도판과 그라우저로 구성된 궤도시스템을 주행장치로 하는 차량을 의미한다. 궤도시스템은 차륜에 비해 구동의 자율성은 떨어지지만 넓은 접지면적을 제공하여 지반에 가해지는 접지압을 낮추고 큰 구동력을 확보할 수 있으므로(Yong, 1984), 야지를 구동하며 작업을 수행하는 대형장비(군용 및 건설용 중장비 등)에 널리 활용되고 있다. 지면의 강도가 충분하여 엔진의 출력을 모두 유용한 추진력으로 활용할 수 있는 도로주행차량과 달리, 포장되지 않은 야지를 구동하는 궤도차량(이하 야지궤도차량)의 구동성능은 지반-궤도 접지면에서 발생하는 지반의 전단 및 침하현상에 의해 제한된다(Wong, 1989). 특히 차량의 중량에 의해 발생되는 정적침하(static sinkage) 및 궤도시스템이 지반에 전단하중을 가할 때 발생되는 슬립침하(slip sinkage)는 지반-궤도 접지면에서 지반저항력을 발현시켜 야지궤도차량의 구동을 직접적으로 방해하는 요소로 작용하므로(Bekker, 1960), 이를 평가하고 제한하는 것은 야지궤도차량의 구동성능 평가 시 핵심적 고려사항이다.
Bekker(1956)가 지반-궤도 상호작용 이론(soil-track interaction theory)을 정립한 이래로, 야지궤도차량 구동 시 발생하는 지반침하를 예측하기 위한 연구가 정적침하 평가를 중심으로 수행되어 왔다. Bekker(1956)와 Kogure 등(1983)은 궤도시스템을 야지궤도차량의 중량을 지지하는 얕은 기초(shallow foundation)로 보아 탄성침하량 평가방법을 통해 정적침하를 산정할 수 있음을 밝혔다. 또한 여러 연구자들(Bekker, 1960; Kacigin, 1968; Kogure, 1976; Wong, 1989)은 다양한 지반에서 수행된 베바미터(bevameter)의 압력-침하 시험(pressure-sinkage experiment) 결과를 바탕으로 평판의 연직압력과 정적침하의 경험적 관계식을 제안하였고, Wong과 Huang(2006)과 Baek 등(2018)은 이를 통해 다양한 지반 및 차량조건에서 야지궤도차량의 정적침하를 산정하고 지반저항력을 평가한 바 있다.
반면, 궤도시스템이 지반에 전단하중을 가할 때 발생되는 슬립침하를 평가하기 위한 연구는 매우 부족한 실정이다. Bekker(1969)가 Terzaghi(1943)의 얕은 기초 지지력 식을 변형하여 야지궤도차량의 슬립침하 산정식을 제안한 바 있지만, 이는 차량중량이 지반의 지지력보다 큰 경우에만 적용 가능하다는 한계가 있다. Lyasko (2010)는 탄성이론을 바탕으로 슬립침하 산정식을 제안하였으나, 슬립침하 발생 시 지반이 소성상태에 놓인다는 점을 고려할 때 실제와 큰 차이가 있을 것으로 판단된다. 또한 Liu 등(2010)은 모형궤도시험을 통해 상부 연직하중 크기가 커질수록 슬립침하가 증가하여 정적침하량의 약 3∼5배까지 발생함을 밝힌 바 있지만, 한 가지 모래지반을 대상으로 수행된 제한적인 결과였다.
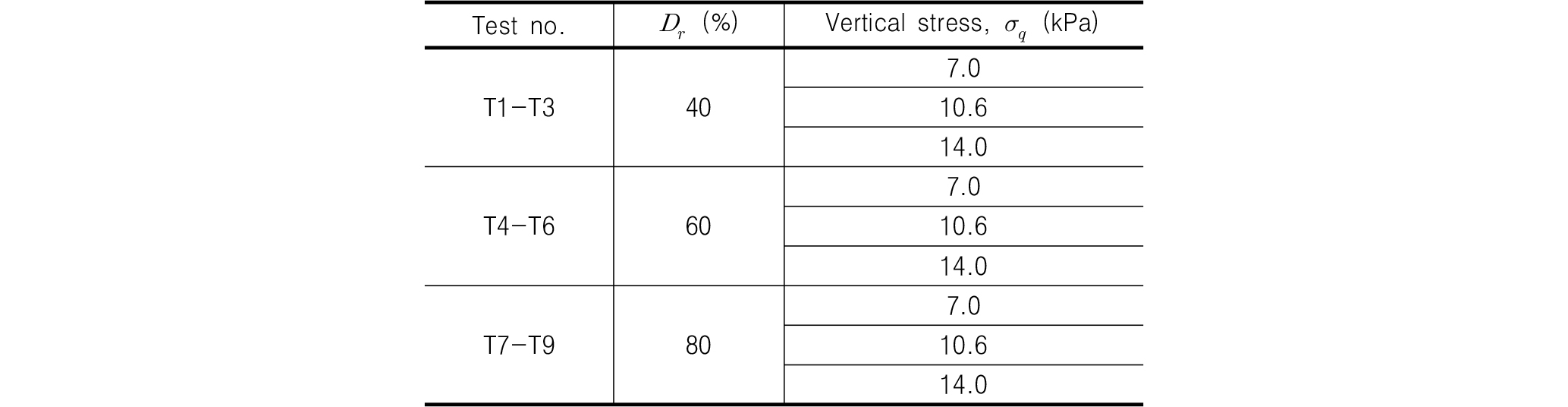
이러한 한계를 극복하고자, 본 연구에서는 서로 다른 상대밀도(40%, 60%, 80%)로 조성된 실트질 모래지반에서 서로 다른 크기의 상부 연직하중(7.0kPa, 10.6kPa, 14.0kPa)이 적용된 모형궤도시험을 수행하여 지반조건 및 하중조건이 슬립침하에 미치는 영향을 종합적으로 평가하였다. 모형시험 결과를 바탕으로 야지궤도차량의 슬립침하 산정식을 제안하여 이를 실트질 모래지반에서 야지궤도차량의 구동성능 평가 시 활용할 수 있도록 하였다. 연구내용의 이해를 돕기 위하여 야지궤도차량 구동 시 발생되는 지반침하 및 지반저항력을 평가하기 위한 이론을 정리한 뒤, 본격적인 분석과정 및 결과에 관하여 서술하였다.
2. 야지궤도차량 구동 시 지반침하 및 지반저항력
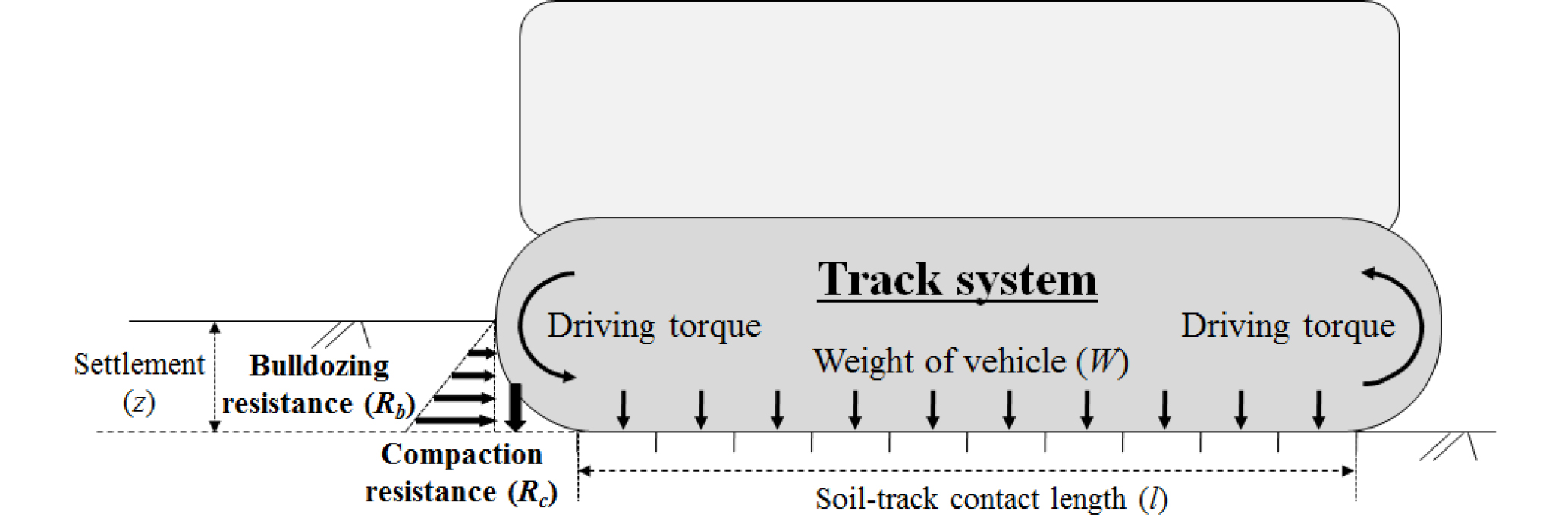
야지궤도차량의 주행장치인 궤도시스템은 구동토크(driving torque)와 차량중량(W)을 지면에 전달하는 역할을 한다(Fig. 1 참고). 궤도시스템을 통해 각각 수평 및 연직방향으로 전달된 힘이 지반을 전단 및 침하시킴에 따라 야지궤도차량의 구동성능이 제한된다. Bekker (1956)의 지반-궤도 상호작용 이론에서는 궤도시스템에 의한 지반의 전단변위를 슬립변위(j)로 표시하며, 궤도시스템이 수평으로 접지길이(l) 만큼 이동할 때 발생되는 슬립변위의 상대적인 크기를 슬립율(i)이라 정의하고 식 (1)과 같이 나타내고 있다.
 (1)
(1)
또한 야지궤도차량 구동 시 지반-궤도 접지면에서 발생되는 지반침하(zt)는 차량중량에 의해 발생되는 정적침하(zo)와 지반이 전단될 때(즉, 슬립변위가 발생될 때) 발생되는 슬립침하(zi)의 합으로 식 (2)와 같이 나타낼 수 있다(Reece, 1964).
 (2)
(2)
Fig. 1에 나타낸 바와 같이, 야지궤도차량 구동 시 발생되는 지반침하는 지반-궤도 접지면에서 압축저항력(compaction resistance) 및 불도징저항력(bulldozing resistance)과 같은 지반저항력을 발현시킴으로써 야지궤도차량의 기계적 구동성능을 제한한다. 지반저항력 중 압축저항력(Rc)은 궤도시스템을 통해 지반에 전달된 힘의 일부가 지반을 침하시키는데 사용되기 때문에 발생한다. 압축저항력은 지반-궤도 접지면의 면적과 같은 지반이 압축되는데 소요된 일과 궤도시스템을 수평으로 접지길이 만큼 견인할 때 압축저항력이 한 일이 같다는 원리로 식 (3)과 같이 평가할 수 있다(Bekker, 1960).
 (3)
(3)
여기서, w는 궤도시스템의 너비를 의미한다. 불도징저항력(Rb)은 Fig. 1에서 확인할 수 있듯이, 야지궤도차량 주행 시 궤도시스템 전면에 쌓인 지반에 의한 저항으로서 이 또한 차량의 하중에 의해 지반침하가 발생하기 때문에 발현된다. 즉, 불도징저항력은 궤도시스템과 같은 너비의 판을 이용하여 궤도시스템 전면에 쌓인 지반을 밀어낼 때 소요되는 힘(즉, 수동토압을 극복하는데 필요한 힘)의 크기로 Rankine 수동토압 이론을 활용하여 다음과 같이 나타낼 수 있다.
 (4)
(4)
여기서, γ는 지반의 단위중량, c는 지반의 점착력이며, Kp는 마찰각에 의해 결정되는 Rankine의 수동토압계수를 의미한다. 야지궤도차량 구동 시 작용하는 전체 지반저항력(R)은 식 (3)과 식 (4)를 통해 독립적으로 산정된 압축저항력과 불도징저항력의 합으로 평가할 수 있다.
이처럼 야지궤도차량의 지반저항력은 지반-궤도 접지면에서 발생하는 지반침하에 의해 발현되므로 이를 정확히 산정하여 적용할 필요가 있지만, 현재는 슬립침하 평가를 위한 이론적 배경이 부족한 관계로 대부분 정적침하만을 고려하여 지반저항력을 평가하고 있다. 그러나 실제 야지궤도차량의 지반저항력은 정적침하만을 고려하여 예측한 것 보다 두 배 이상 크게 발현되는 것으로 알려져 있기 때문에(Reece, 1965), 슬립침하의 영향을 고려하여 지반저항력을 평가하고 이를 구동성능 평가에 활용할 필요가 있다.
3. 모형궤도시험 조건 및 방법
3.1 모형시험 장비
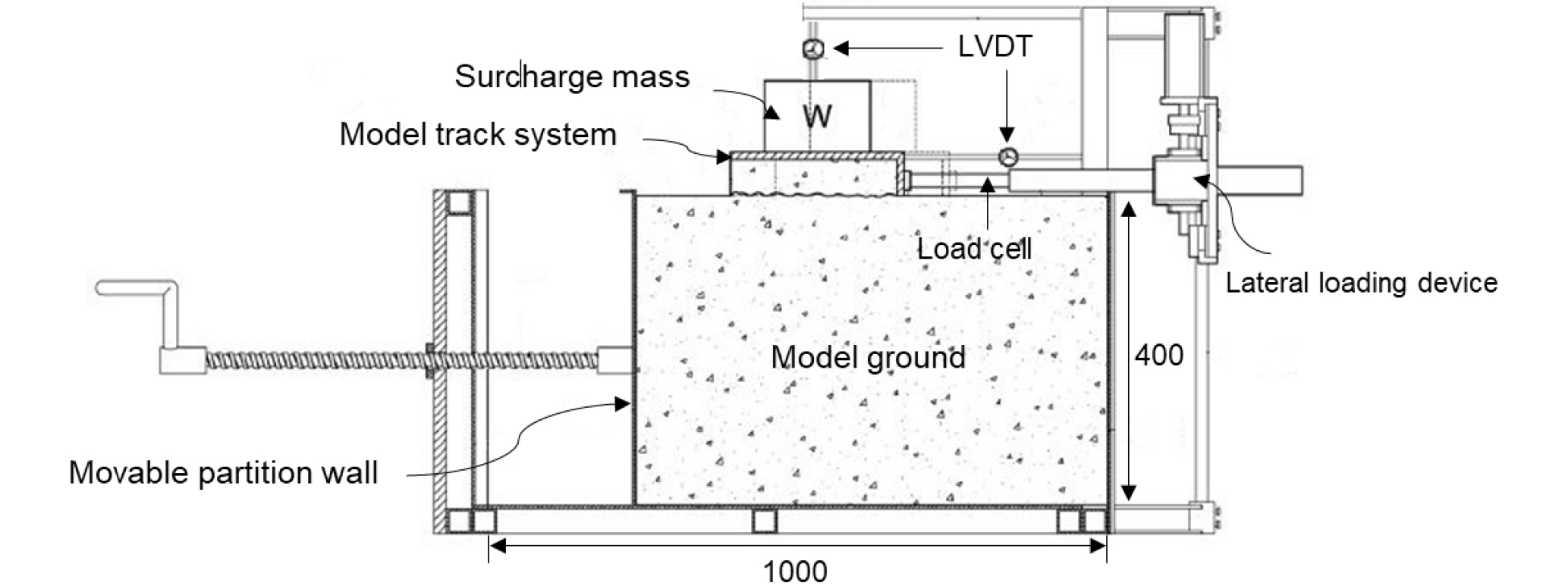
본 연구의 모형궤도시험은 너비 800mm, 길이 1000mm, 높이 500mm의 직육면체 모형토조에서 수행되었다. Fig. 2에 나타낸바와 같이, 모형토조 내부에 길이 및 너비방향으로 이동식 격벽(movable partition wall)을 설치하여 모형지반의 너비와 길이를 각각 650mm 및 450mm로 조절하였다. 또한 W.E.S. (1994)에서 경험적으로 제안된 조립토(coarse-grained soils) 및 세립토(fine-grained soils) 지반에서 야지궤도차량의 영향깊이가 각각 180mm 및 360mm임을 고려하여, 모형지반의 높이를 400mm로 결정하였다.

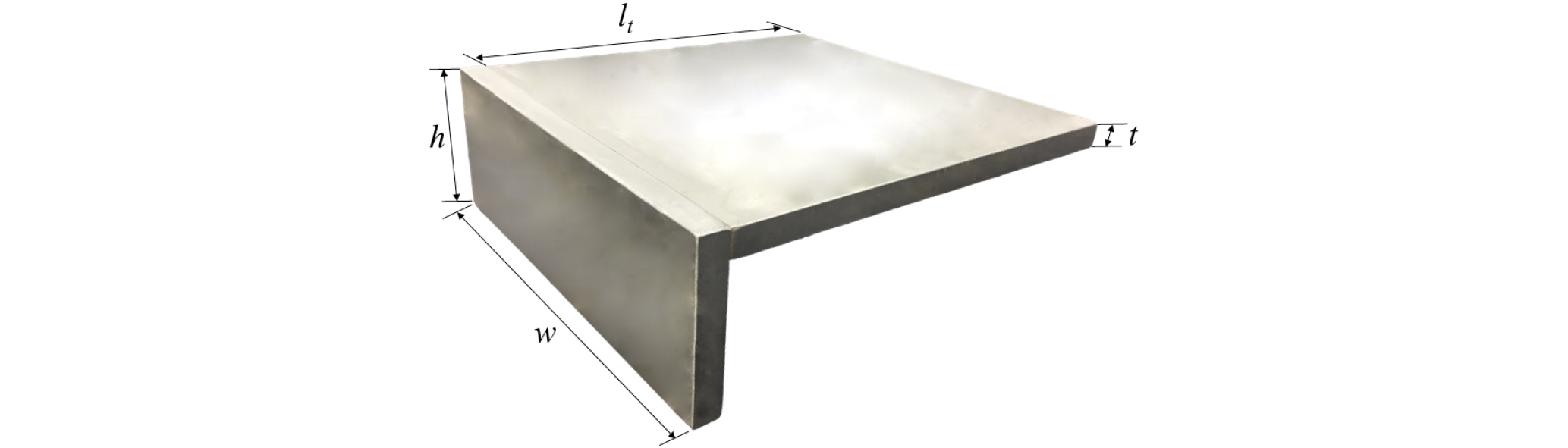
본 연구에서는 모형시험의 크기효과(size effect)를 고려하기 위하여 중작업용 야지궤도차량에 널리 적용되고 있는 현대제철의 상용 단일 궤도시스템(single track system)의 제원에 Iai(1989)의 1g 상사관계를 적용시켜 축소모사 하였다(Table 1 참고). 이때, 모형궤도시스템 제작 시 적용한 길이상사비 (λ)가 1.6으로 상대적으로 작아 원형(prototype)과 모형에서 발생되는 변형율에 큰 차이가 없을 것이라 판단하여, 변형율 상사비를 1이라 가정하고 상사비를 적용하였다. 또한 Reece(1964)와 Park (1996)의 연구를 참고하여 야지궤도차량의 슬립침하 발현에 미치는 영향이 미미할 것으로 판단되는 궤도시스템의 너비를 900mm에서 247.7mm로(모형궤도시스템 기준 562.5mm에서 154.8mm로) 감소시켜, 모형시험 시 적용할 연직하중 및 수평하중의 크기를 줄일 수 있도록 하였다. Fig. 3 및 Table 1에 나타낸바와 같이 모형궤도시스템의 제원은 너비(w) 및 길이(lt) 154.8mm, 두께(t) 9mm, 그라우저 높이(h) 44.6mm로 최종 결정되었고, 강판(steel plate)을 활용하여 제작되었다.
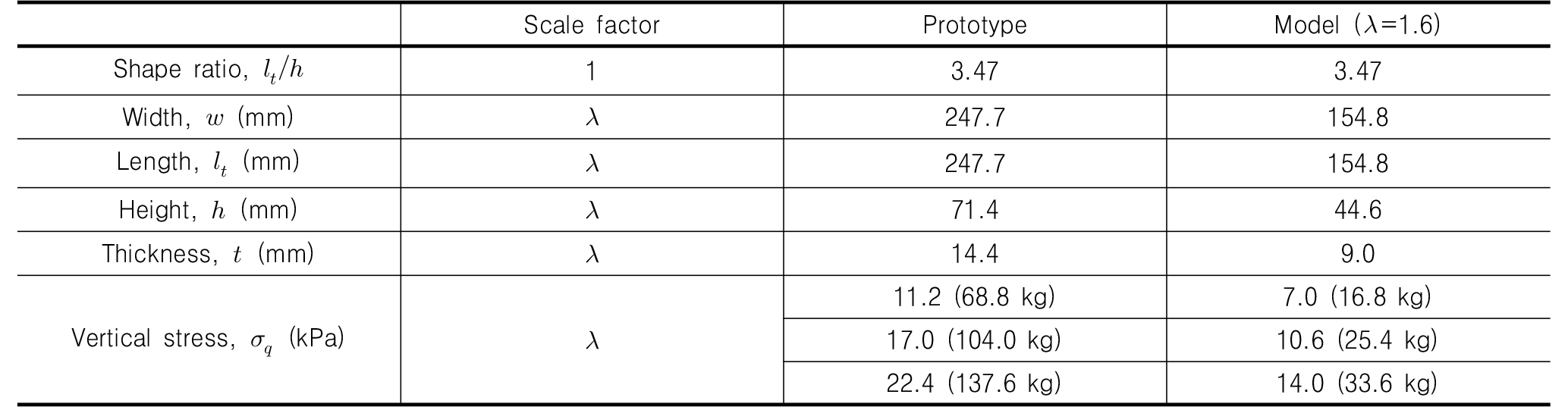
10톤, 15.1톤, 20톤의 야지궤도차량 중량이 너비 900 mm 및 길이 4954mm인 두 개의 원형(full-scale prototype) 궤도시스템에 균등하게 분포할 때 작용하는 연직응력을 산정하고, Iai(1989)의 1g 상사비를 적용하여 차량의 중량을 모사하였다. Table 1과 같이 모형시험에 적용할 연직응력은 각각 7.0kPa, 10.6kPa, 14.0kPa로 결정되었고, 이는 각각 16.8kg, 25.4kg, 33.6kg의 무게추를 활용하여 사하중의 형태로 모형궤도시스템에 재하했다. 또한 변위제어가 가능한 횡방향 재하장치를 통해 궤도시스템에 작용하는 수평하중(구동토크)을 모사했다. 모형시험이 수행되는 동안 모형궤도시스템의 연직 및 수평방향 변위를 연직 및 수평방향으로 설치된 변위계(LVDT)를 통해 1초에 1회씩 측정하였으며, 슬립변위 평가 시 활용하였다.
3.2 모형지반
모형지반 조성에는 관악산 지역에서 채취한 풍화토(weathered soil)를 사용하였고, 기본 물성값은 Table 2와 같았다. 채취된 시료는 200번체 통과백분율이 31.9%이고 통일분류법(Unified Soil Classification System)에 의해 실트질 모래(SM)로 분류되었는데, 직경이 4번체 크기(4.75mm) 이상인 입자는 모형시험 결과에 과도한 영향을 줄 수 있다고 판단되어 제거한 뒤 모형지반 조성에 활용하였다(채취시료 전체 중량의 약 1%정도).

모형지반은 최적 함수비(12.7%) 조건에서 습윤다짐법(Ladd, 1978; Frost and Park, 2003)을 통해 서로 다른 세 가지 상대밀도(40%, 60%, 80%)의 단일지반으로 조성되었다. 직접전단시험을 수행한 결과 모형지반의 점착력은 각각 6.1kPa, 8.8kPa, 11.1kPa로 마찰각은 각각 30.7°, 36.4°, 38.3°로 평가되었다. 각각의 모형지반 조성 후 간이콘(portable cone penetrometer)을 활용하여 원추지수를 측정하였고(각 상대밀도 별 평균 282.2kPa, 403.5 kPa, 526.8kPa), 그 결과 모형지반의 균질성을 확인하였다.
3.3 모형시험 방법 및 계획
앞서 언급한 과정을 통해 조성된 균질한 모형지반에서 모형궤도시험이 수행되었다. 우선 모형지반을 모형궤도시험에 적합한 형태로 트리밍하고 그 위에 모형궤도시스템 및 연직사하중을 설치하였다(Fig. 4 참고). 수평하중 재하 시 궤도시스템이 진행하는 방향의 배후지반은 제거하였는데, Grecenko(2007)에 의하면 야지궤도차량 구동 시 지반은 각각의 궤도시스템에 의해 독립적으로 전단되므로 배후지반이 미치는 영향을 배제하는 것이 보다 현실적이라고 판단했기 때문이다. Fig. 4(b)와 같이 모형궤도시스템에 일정한 속도(3% strain/min)로 수평하중을 재하할 때 발생하는 연직 및 수평변위를 변위계(LVDT)를 통해 측정하여, 이를 각각 슬립침하 및 슬립율 평가에 활용했다. 모형시험의 전체적인 모식도는 Fig. 5와 같다.

본 연구에서 수행된 모형궤도시험의 조건을 Table 3에 정리하여 나타냈다. 모형궤도시험은 야지궤도차량의 중량 및 구동지반 조건이 슬립침하에 미치는 영향을 평가할 수 있도록, 서로 다른 상부 연직하중 및 지반 상대밀도 조건에서 총 9회 수행되었다.
4. 모형궤도시험 결과 및 분석
4.1 지반-궤도 접지면 파괴형상
야지궤도차량의 슬립침하는 궤도시스템에 의해 지반이 전단될 때 발생하기 때문에, 슬립침하를 평가하기 위해서는 지반-궤도 접지면의 전단파괴형상을 관찰해야 한다. Fig. 6은 모형궤도시험 시 궤도시스템에 의해 발생 된 지반의 파괴형상을 상부에서 촬영한 것으로, 지반-궤도 접지면의 파괴형상은 연직 상부하중 및 지반의 상대밀도에 관계없이 일정한 것으로 나타났다. 모든 시험조건에서 궤도시스템과 동일한 형태의 지반블록이 형성되고 블록의 저면 및 측면지반을 따라 파괴가 발생하였는데, 이는 Grecenko(2007)의 연구와 유사한 경향이었다.
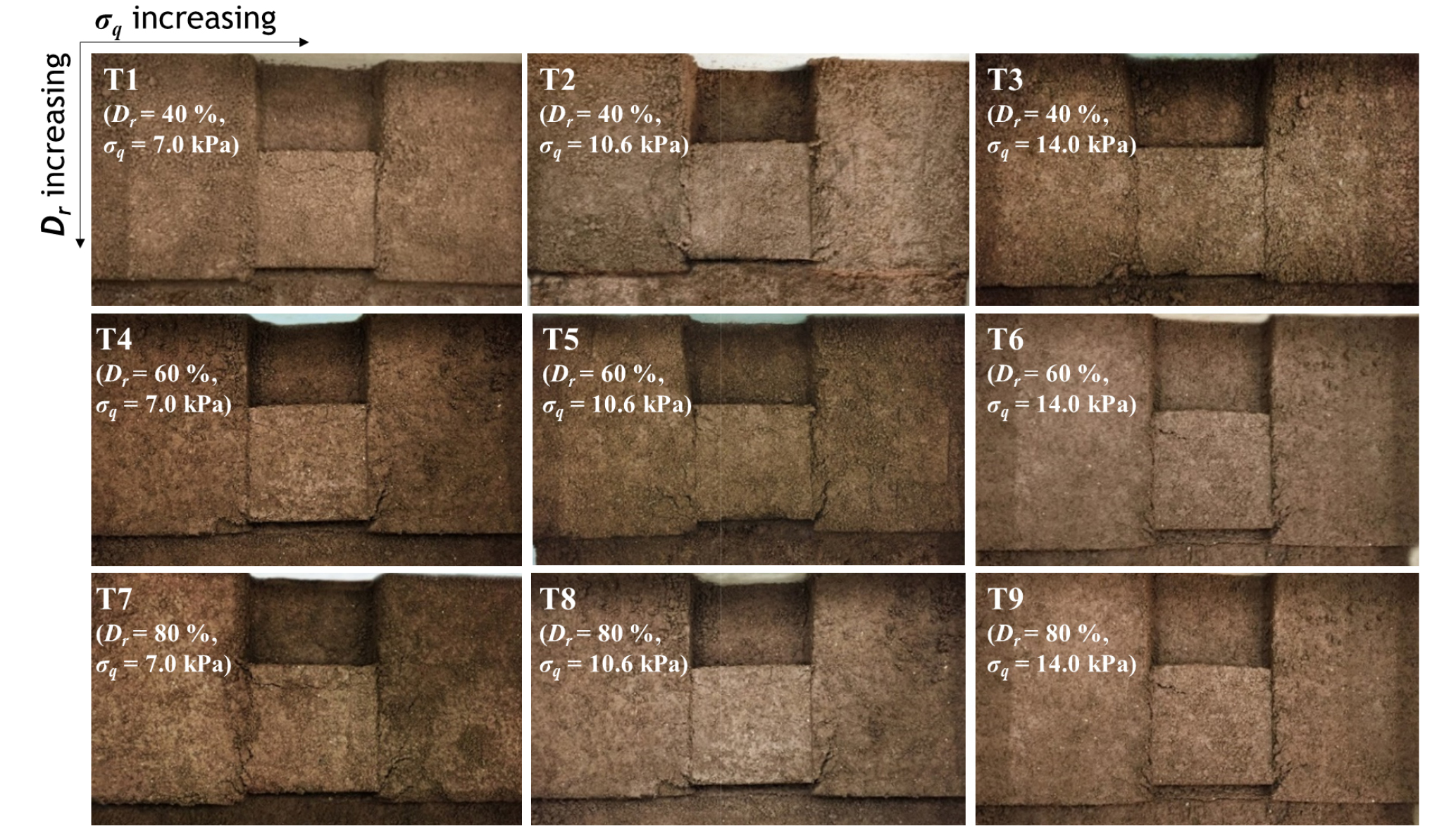
지반-궤도 접지면 파괴형상 관찰 결과, 슬립침하는 지반블록이 전단되면서 발생하는 연직변위에 의해 유발되며 이는 지반의 직접전단시험 시 시료의 부피변형으로 인한 연직변위와 유사하다는 것을 알 수 있었다. 다만, 측면이 모두 강체로 구속되어 있는 직접전단 시료와 달리 지반블록은 그라우저가 위치한 한쪽면만 강체로 구속되어 있다는 차이가 있어, 슬립침하와 직접전단시험 시 시료의 연직변위가 완전히 동일한 경향을 보이지는 않을 것으로 판단되었다.
4.2 슬립침하-슬립율 관계
모형시험 시 측정된 궤도시스템의 연직 및 수평방향 변위로부터 Fig. 7과 같이 슬립침하-슬립율 관계를 평가했다(하향 슬립침하를 양수로 도시했다). 이때 슬립침하는 궤도시스템의 연직변위와 동일한 값이고, 슬립율은 측정된 수평변위(=슬립변위)와 궤도시스템의 길이(154.8mm)를 식 (1)에 대입하여 산정하였다.

Fig. 7에서 보듯이, T4(상대밀도 60% 및 연직응력 7kPa)에서 약간의 상향 슬립침하가 관찰되지만 모든 시험조건에서 슬립율이 증가함에 따라 하향 슬립침하가 발생했다. 하향 슬립침하의 크기는 슬립율이 증가함에 따라 점차 증가하는 경향을 보였지만 증가율은 점차 감소하였다. 이는 직접전단시험에서 전단이 진행됨에 따라 흙 시료의 연직변위가 증가하는 것과 유사한 경향이지만, 전단 시 시료의 부피팽창으로 인해 상향 연직변위가 관찰되는 조밀한 지반(Lambe과 Whitman, 1979)에서도 하향 슬립침하가 발생한다는 차이가 있었다. 이는 시료의 측면이 모두 강체로 구속되어있어 시료의 부피변형이 모두 연직방향으로만 발생하는 직접전단시험과 달리 지반블록은 그라우저가 위치한 한쪽 측면만 강체로 구속되어있어 다른 측 방향으로도 부피변형이 발생하기 때문으로 판단된다.
또한 상부 연직하중의 크기가 크고 지반의 상대밀도가 작을수록 슬립침하가 크게 발생하는 것으로 나타났다. 앞서 언급한바와 같이 야지궤도차량의 슬립침하가 증가하면 구동을 방해하는 지반저항력도 함께 증가하기 때문에, 큰 중량을 가지는 야지궤도차량이 느슨한 지반에서 구동하는 경우 구동성능을 확보하는데 어려움이 있을 것으로 예상되었다.
4.3 정규화 된 슬립침하-슬립율 관계
상부 연직하중 및 지반의 상대밀도가 슬립침하에 미치는 영향을 보다 정량화하여 평가하기 위해서, 정적침하에 대한 슬립침하의 비로 정의되는 정규화 된 슬립침하(zi/z0)를 평가하여 Fig. 8에 도시하였다. 이때 각 시험조건별 정적침하는 Bekker(1956)와 Kogure(1983)의 연구를 참고하여 Bowles(1987)의 강성기초(rigid foundation) 탄성침하량 평가방법으로 산정하였다(식 (5) 참고).
 (5)
(5)
여기서, μ는 지반의 포아송비로 Hunt(1986)가 제시한 모래 및 세립모래의 대푯값(=0.25)을 적용하였고, Es는 지반의 탄성계수로 Schemartmann 등(1978)에 따라 모형지반에서 측정된 원추지수의 2.5배를 적용하였다. 또한 Is및 If는 형상계수 및 깊이계수로 궤도시스템의 형상에 따라 각각 0.556 및 0.953으로 산정되었다(Bowles, 1987).

Fig. 8에서 보듯이, 정규화 된 슬립침하는 슬립율이 증가함에 따라 커지지만 연직하중 및 지반의 상대밀도에는 큰 영향을 받지 않는 것으로 나타났다. 이를 통해, 야지궤도차량의 구동조건 별 정적침하를 평가하면 Fig. 8에 나타낸 정규화 된 슬립침하-슬립율 관계를 활용하여 슬립침하를 예측할 수 있음을 확인하였다.
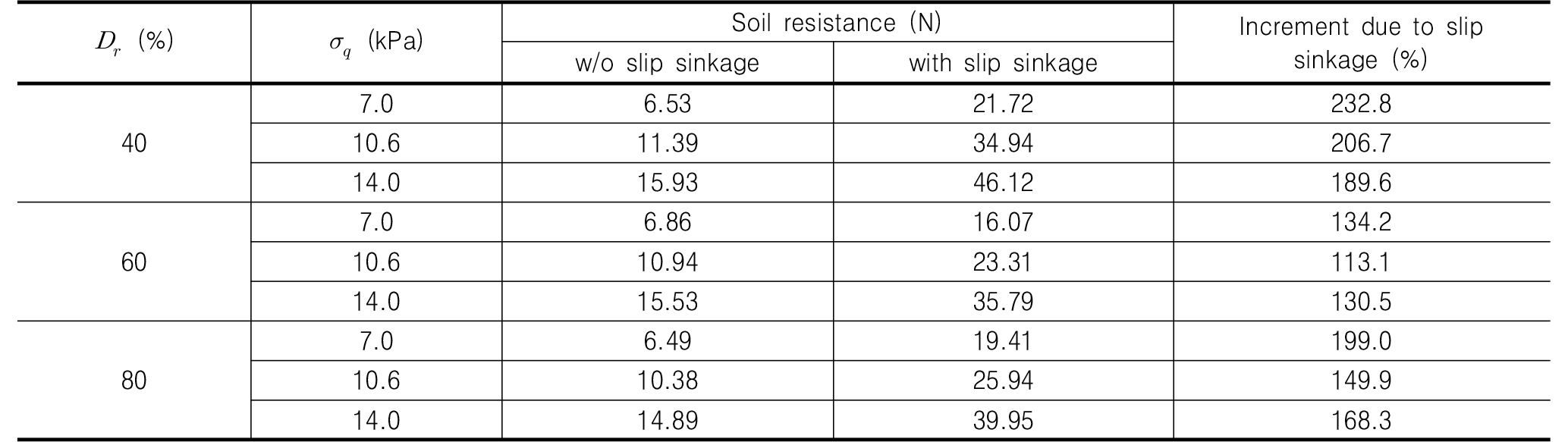
슬립율은 야지궤도차량의 구동효율에 큰 영향을 미치며, 대부분 0에서 0.2 수준의 슬립율 조건에서 차량이 구동되는 것이 바람직하다고 알려져 있다(Wong, 1989; Ding, 2011). 이에 본 연구에서는 슬립율이 두 값의 평균인 0.1일 때를 기준으로, 정적침하 대비 발생된 슬립침하의 크기와 이로 인한 지반저항력 증가를 분석하였다. 우선 슬립율이 0.1일 때의 슬립침하는 각 시험조건별로 다소 차이는 있었지만 평균적으로 정적침하에 비해 약 2.1∼3.3배 크게 발생하는 것으로 나타났다(Fig. 8 참고). 또한 식 (3)과 식 (4)를 활용하여 정적침하만 고려한 지반저항력과 0.1 슬립율 수준에서 발생된 슬립침하도 함께 고려한 지반저항력을 모형궤도시스템 제원을 기준으로 산정하여 Table 4에 정리하였다. 그 결과, 슬립침하를 고려하는 경우 지반저항력은 정적침하만 고려한 결과에 비해 약 113.1∼232.8%까지 증가하는 것으로 평가되었다. 이는 실제 야지궤도차량의 지반저항력이 정적침하 만을 고려하여 예측한 것보다 두 배 이상 크게 발현된다는 Reece(1965)의 연구결과와 유사한 경향으로써, 이상의 결과를 종합할 때 지반저항력 평가 시 슬립침하의 영향을 반드시 고려해야 할 것으로 판단된다.
5. 야지궤도차량 슬립침하 평가 식 제안
야지궤도차량 구동 시 정규화 된 슬립침하는 상부 연직하중 및 지반의 상대밀도와는 큰 관련이 없었고 슬립율이 증가함에 따라 커지다가 점차 수렴하는 경향을 보였다. 이러한 경향을 고려하여 본 연구에서는, 정규화 된 슬립침하를 슬립율의 함수로 나타내어 구동조건에 따라 산정된 정적침하를 바탕으로 슬립침하를 예측할 수 있도록 하였다(Fig. 9 참고).

정규화 된 슬립침하-슬립율 관계가 시그모이드(sigmoid) 함수형태를 보이는 것을 고려하여, 대표적인 시그모이드 함수인 로지스틱 회귀분석 식을 통해 정규화 된 슬립침하의 슬립율에 대한 산정식을 평가하였다(식 (6)).
 (6)
(6)
여기서, A1, A2는 각각 y의 최소값 및 최대값을 의미하고, x0, p는 곡선의 형태에 따라 결정되는 상수이다.
Fig. 9에 나타낸 것과 같이, 정규화 된 슬립침하-슬립율 관계를 가장 잘 예측하는 최적곡선(best-fit curve)을 평가하여 식 (6)의 상수를 결정할 수 있었다. 결정된 상수를 식 (6)에 대입하고 이를 슬립변위에 대해 정리하여 다음과 같은 야지궤도차량 슬립변위 평가 식을 제안하였다.
 (7)
(7)
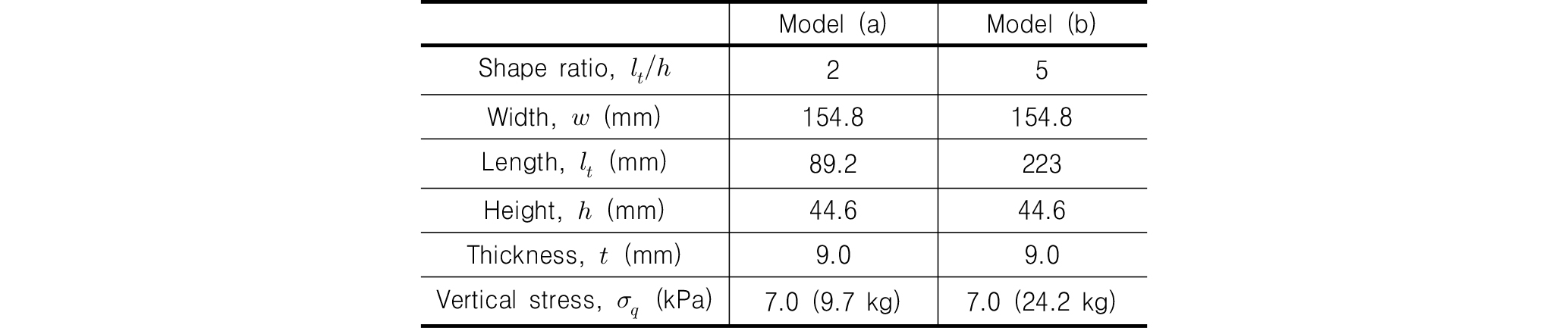
이상의 슬립침하 평가결과 및 제안된 산정식의 적용성을 검증하기 위하여, 본 연구에서 사용된 것과 다른 제원을 가지는 두 모형궤도시스템을 활용하여 추가 모형시험을 수행하였다. 추가 검증시험 시 사용된 모형궤도시스템의 제원은 Table 5와 같으며, 본 연구에서 사용된 것과 동일한 흙 시료를 상대밀도 40% 및 80%로 조성하여 모형지반으로 활용하였다.
앞서 기술한 것과 동일한 과정을 통해 수행된 검증시험 결과로부터 슬립침하-슬립율 곡선을 평가하고 이를 제안된 식 (7)로부터 예측한 슬립침하-슬립율 곡선과 비교하였다. 추가적으로, Lyasko(2010)가 탄성이론을 바탕으로 제안한 슬립침하 산정식(식 (8))을 바탕으로 예측한 슬립침하-슬립율 곡선도 함께 비교하여 Fig. 10에 나타냈다.
 (8)
(8)
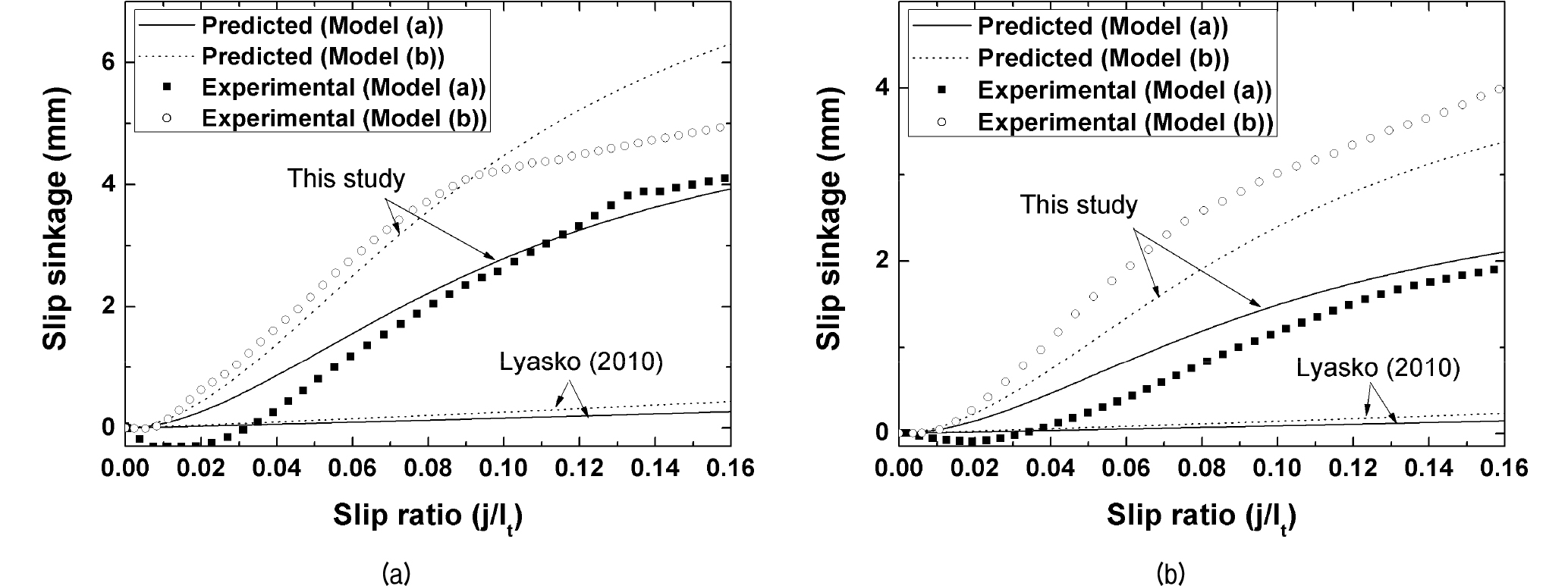
Fig. 7과 유사하게 모든 추가 검증시험에서 하향 슬립침하가 발생하였고, 슬립침하의 크기는 슬립율이 증가함에 따라 증가하지만 증가율은 점차 감소했다. 또한 다소 간의 차이(최대 23% 오차)는 있지만 제안된 산정식이 모형시험 결과를 비교적 정확하게 예측하는 것으로 나타나, 본 연구결과를 실트질 모래지반에서 야지궤도차량의 슬립침하 평가에 적용할 수 있을 것으로 판단된다. 반면, 탄성이론을 바탕으로 제안된 Lyasko(2010)의 산정식은 슬립침하를 매우 과소평가하는 것으로 나타나, 이를 활용할 경우 야지궤도차량의 지반저항력이 매우 과소평가 될 것으로 예상된다.
6. 결 론
본 연구에서는 야지궤도차량 구동 시 지반-궤도 접지면에서 발생되는 슬립침하를 평가하기 위하여 모형궤도시험을 수행하였다. 서로 다른 상대밀도(40%, 60%, 80%)로 조성된 실트질 모래지반에 모형궤도시스템을 설치하고 세 가지 다른 연직응력(7.0kPa, 10.4kPa, 14.0kPa) 및 수평하중을 재하하여 지반조건 및 하중조건이 슬립침하에 미치는 영향을 종합적으로 평가하였고, 다음과 같은 결론을 도출하였다.
(1)모형궤도시험 시, 지반 및 하중조건에 관계없이 궤도시스템에 의해 지반블록이 형성되고 블록의 저면 및 측면지반을 따라 파괴가 발생하였다. 즉, 야지궤도차량의 슬립침하는 지반-궤도 접지면에서 형성된 지반블록이 전단되면서 발생하는 연직방향 변위에 의해 발현됨을 알 수 있었다. 이는 지반의 직접전단시험 시 시료의 연직변위가 발생하는 것과 유사한 현상이지만, 지반블록이 그라우저가 있는 한쪽 측면만 강체로 구속되어 있다는 차이가 있어 완전히 동일한 경향을 보이지는 않았다.
(2)모든 시험조건에 대해 지반-궤도 접지면에서 하향 슬립침하가 발생하는 것으로 나타났다. 슬립침하의 크기는 슬립율이 증가함에 따라 점차 증가하는 경향을 보였지만 증가율은 점차 감소하였다. 또한 상부 연직하중의 크기가 크고 지반의 상대밀도가 작을수록 슬립침하가 크게 발생하는 것으로 나타나, 큰 중량을 가지는 야지궤도차량이 느슨한 지반에서 구동하는 경우 구동성능을 확보하는데 어려움이 있을 것으로 예상되었다.
(3)차량중량에 의해 발생하는 정적침하에 대한 슬립침하의 비로 정의되는 정규화 된 슬립침하는 슬립율이 증가함에 따라 커지지만, 상부 연직하중 및 지반의 상대밀도에는 큰 영향을 받지 않는 것으로 나타났다. 야지궤도차량이 효율적으로 구동할 수 있는 슬립율인 0.1을 기준으로, 슬립침하는 정적침하에 비해 약 2.1∼3.3배 크게 발생하는 것으로 나타났다. 또한 슬립침하를 고려하여 산정한 지반저항력이 정적침하만 고려한 것에 비해 약 113.1∼232.8% 증가하는 것으로 나타나, 야지궤도차량의 지반저항력 평가 시 슬립침하를 반드시 고려해야 함을 확인하였다.
(4)모형궤도시험 결과를 활용하여 야지궤도차량의 슬립침하를 평가하기 위한 산정식을 제안하였다. 검증을 목적으로 수행된 추가 모형시험 결과를 제안된 산정식을 활용하여 예측한 결과, 제안된 산정식을 통해 야지궤도차량의 슬립침하를 비교적 정확하게 예측할 수 있음을 확인하였다.
본 연구결과는 실트질 모래지반을 구동하는 야지궤도차량의 슬립침하를 예측하고 이를 바탕으로 지반저항력을 평가하는데 활용될 수 있을 것이라고 기대된다. 특히, 탄성이론 혹은 베바미터 시험을 통해 평가하고자 하는 대상 야지궤도차량의 정적침하를 평가하면, 제안된 산정식을 통해 슬립침하의 크기를 정량적으로 예측할 수 있다. 다만, 이상의 결론은 한 가지 실트질 모래에서 수행된 시험결과이며, 단일 궤도시스템을 대상으로 모형시험을 수행했기 때문에 불도징 저항현상을 모사하는데 한계가 있었다. 따라서 보다 다양한 지반조건 및 궤도시스템 전체를 대상으로 추가 연구를 수행하여 본 연구결과를 검증 및 보완해야 할 것으로 판단된다.
