

1. 서 론
2. 이론적 배경
2.1 NM-GPR
3. 인공지능 모델
3.1 Faster R-CNN
3.2 YOLO
4. 연구 방법
4.1 데이터 수집
4.2 데이터 구축
4.3 인공지능 모델 개발
4.4 인공지능 모델 평가 방법
5. 연구 결과
5.1 인공지능 모델 성능평가
5.2 인공지능 모델 검증 결과
6. 결 론
1. 서 론
최근 발생한 지반 침하 사고로 인해 지하 안전에 대한 관심이 증가하고 있으며, 복잡하게 매설된 지하 구조물을 효과적으로 관리할 필요성이 대두되고 있다. 특히, 2014년 서울 석촌지하차도에서 발생한 지반 침하 사고 이후 사회적 관심이 더욱 증대되었으며, 이에 따라 2018년 1월 ‘지하 안전관리에 관한 특별법’이 제정되어 각 지자체에서 지반 침하 예방 업무를 수행하고 있다. 도심지 지반 침하의 주요 원인은 지하 관로의 손상 및 노후화, 도로 굴착 공사의 부실 시공, 지하수 등에 의해 형성된 지하 공동으로 보고되며(Bae et al., 2017), 특히 도심지에서의 대규모 굴착은 주변 건물에 피해를 주는 것으로 알려져 있다(Han, 2018).
사전에 공동을 조사하기 위해서는 도로 노면을 시추하거나 굴착하여 육안으로 점검하는 과정이 필요하지만, 인력과 시간의 한계로 인해 비파괴 물리탐사 기법인 지표투과레이더(Ground Penetrating Radar, GPR)가 활용되고 있다. GPR 탐사는 짧은 전자기파를 사용하여 높은 분해능을 가지며, 차량을 이용한 탐사가 가능하여 조사 시간이 짧고 도로를 훼손하지 않는다는 장점이 있어 도로 하부의 매설물 및 공동 탐사에 널리 활용되고 있다(Tomita et al., 1995; Thitimakorn et al., 2016). 또한, 차량형 다채널 방식의 GPR 장비가 보급됨에 따라 넓은 범위를 신속하게 조사할 수 있어 도로 분야에서 적극적으로 활용되고 있다.
그러나 GPR 탐사 데이터를 분석하는 과정에서는 전문 분석 인력의 주관적 판단에 대한 의존도가 높으며, 대용량 데이터를 분석하는 데 많은 시간이 소요된다. 또한, 분석자의 경험과 숙련도에 따라 결과의 일관성이 부족하여 신뢰성 문제가 발생할 가능성이 있다. 이러한 문제를 해결하기 위해 최근에는 인공지능(AI)을 활용한 탐지 기술 개발이 활발히 이루어지고 있다.
인공지능 기술은 2010년대 이후 딥러닝(Deep learning)의 발전을 중심으로 비약적인 성장을 이루었다. 딥러닝 기반 모델들은 자연어 처리(NLP), 컴퓨터 비전, 음성 인식 등 다양한 분야에서 우수한 성능을 보이며 실생활에 폭넓게 적용되고 있다. 특히, 대량의 데이터를 효과적으로 학습할 수 있는 합성곱 신경망(Convolutional Neural Network, CNN)과 순환 신경망(Recurrent Neural Network, RNN)이 개발되면서 이미지 및 음성 인식 분야에서 획기적인 성과를 거두었다. 이후 트랜스포머(Transformer) 모델이 등장하면서 자연어 처리 분야에서도 성능이 크게 향상되었다.
현재 GPR 데이터를 활용한 인공지능 탐지 기술이 다양한 분야에 적용되고 있다. 예를 들어, 콘크리트 교량 바닥판의 철근 위치 자동 탐지 알고리즘 개발(Dinh et al., 2018), 교량의 열화 손상 평가 연구(Asadi et al., 2019), 맨홀·배관·지하 공동 등의 자동 검출 및 분류 기술 연구(Kim et al., 2018; Tran and Lee, 2020), YOLO 알고리즘을 활용한 터널 GPR 이미지 내 강지보재 탐지(Bae et al., 2023) 등이 진행되었으며, 이를 통해 인공지능 기술 적용의 가능성이 입증되었다. 최근 연구들은 인공지능을 활용하여 탐지 정확도를 향상시키는 방향으로 진행되고 있다. 그러나 현재 활용되는 GPR 데이터는 대부분 임펄스 신호(Impulse signal)를 기반으로 한 장비에서 수집된 것으로, 이와 다른 유형의 신호를 사용하는 장비에는 적용성이 낮은 한계가 있다. 현재 GPR 장비는 크게 임펄스 신호를 사용하는 장비와 코드화된 신호를 사용하는 장비로 구분된다. 기존 연구들은 대부분 임펄스 신호 기반 GPR 장비를 활용한 연구가 진행되어 왔으며, 코드화된 신호를 사용하는 NM-GPR(Noise-modulated GPR) 장비를 활용한 공동 탐지 인공지능 모델 연구는 아직 미흡한 실정이다.
본 연구에서는 NM-GPR 장비로 수집한 데이터를 분석하고, 이를 학습데이터 셋으로 구축하였다. 탐지객체는 공동, 맨홀, 배관, 비공동으로 설정하고, 각 객체 위치를 분석하여 학습데이터 셋을 구축하였고, 객체탐지 모델인 YOLO와 Faster-RCNN 모델을 개발하였다. 이후 AI 모델 검증을 위해 정밀도, 재현율, mAP(mean Average Precision)를 평가하였다.
2. 이론적 배경
2.1 NM-GPR
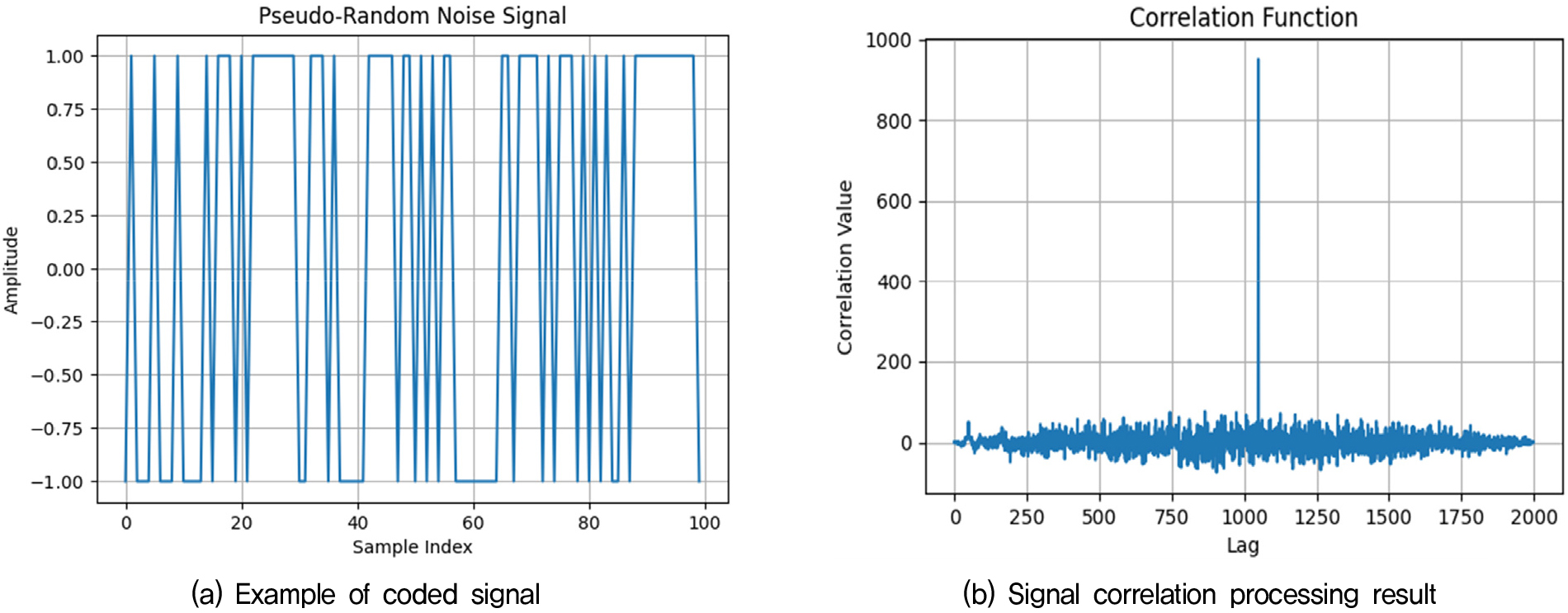
GPR 탐사란 전자기파를 지하로 송신하여 이종 매질에 반사되어 돌아오는 파의 시간을 측정하여 탐사하는 기술이다. 일반적으로 유전율 차이로 신속하게 지하구조 및 지하시설물을 탐사할 수 있어 현재 도로 공동탐사에 활용하고 있다. GPR 탐사는 주파수대역에 따라 탐사 심도 및 해상도가 변화한다. 또한 전자기파 신호에 따라 임펄스 신호 장비와 코드화된 신호를 활용하는 장비로 나눌 수 있다. 현재 대부분은 임펄스 신호 장비를 사용하여 다양한 분야에서 활용하고 있지만, 도로 공동탐사 분야에서는 코드화된 신호를 활용한 NM-GPR도 활용하고 있다. 일반적으로 코드화된 신호(Coded signal)를 사용하여 같은 주파수 대역의 다른 방식에 비해 깊은 심도까지 투과할 수 있으며 빠른 탐사 속도를 가진다. 또한 일정 주파수 대역에만 에너지가 집중되는 임펄스(Impulse) 방식과 이들의 중첩인 Step-Frequency 방식과 달리 매우 넓은 주파수 대역을 사용하고, 중합하여 높은 신호 대 잡음비 신호를 형성하는 장점이 있어 도로 공동탐지에 활용되고 있다. 일반적으로 PRN(Pseudo-Random Noise) 또는 GWN(Gaussian White Noise)을 생성하여 대역 확산(Spread spectrum) 방식으로 활용되고, 신호 형태는 Fig. 1(a)와 같다.
본 연구에서는 GPR 데이터를 수집하기 위해 사용된 장비는 코드화 신호(Coded-signal)를 사용하는 NM-GPR을 활용하여 수집하였다. NM-GPR 탐사법은 노이즈를 사용하여 데이터의 시 인성을 높이고 사용 전력을 경량화하여 빠른 속도로 도로에서 탐사할 수 있도록 하였다(Reeves and Muller, 2012; Reeves, 2014). NM-GPR은 송신신호와 수신 신호를 상호상관(Cross-corelation) 하여 신호대 잡음비(Signal/Noise ratio)를 향상시켜 깊은 심도에서 선명한 반사 신호를 취득한다(Fig. 2(b)). 이 방법은 데이터의 해상도가 높고 위상 왜곡이나 Ringing이 덜 발생하며 고속의 스위치를 사용하여 탐사 속도가 일반 차량의 통행 속도와 유사할 수 있으며 가탐 심도도 일반적으로 심도 2.0m(최대 5.0m)까지 도달한다. 널리 상용되는 방식은 아니지만 상대적으로 빠른 탐사속도로 인해 비용절감의 효과를 갖는다.
도로 공동 자료를 수집에 활용한 NM-GPR 장비는 총 3대로서 전부 차량형 3차원 수집 센서로 구성되어 있다. NM-GPR 1과 NM-GPR 2 장비는 안테나 주파수가 100MHz~4GHz인 초광대역 주파수이며, NM-GPR 3 장비는 안테나 주파수가 600MHz~1.5GHz를 사용하는 High안테나와 100MHz~1.2GHz를 사용하는 Low안테나로 구성되어 있다. Table 1은 3차원 GPR 데이터를 수집할 수 있는 탐사 장비의 제원이다. 3개 센서의 탐사 심도는 2.0m이고, 최대 5.0m까지 탐사가 가능하다. 각 장비별 특징은 Table 1과 같다.
Table 1.
Exploration equipment specifications
3. 인공지능 모델
딥러닝 기반의 객체탐지 모델은 객체 위치를 찾는 영역 추정 단계(Region proposal)와 선택적 탐색단계(Selective search)로 구성되어 독립적으로 수행하는 방식 2 단계(2-stage) 탐지 방식과 영역 추정 단계와 객체 분류 단계를 동시에 수행하는 1 단계(1-stage) 탐지 방식으로 구분할 수 있다(Zou et al., 2019). 일반적으로 2단계 방식은 1 단계 방식보다 객체 탐지 속도가 느리지만, 높은 정확도를 가지는 장점이 있다. 대표적인 방식은 Fast R-CNN(Girshick, 2015), Faster R-CNN(Ren et al., 2015) 등이 있다. 대표적인 1 단계 탐지 방식인 Yolo 모델은 영역 추정 및 분류를 동시에 수행하여 객체 탐지 속도가 빠른 장점이 있어 도로 GPR 탐사 분야에서 활용되고 있다(Choi et al., 2022). 본 연구에서는 두 가지 탐지 방법의 모델을 비교하여 공동 탐지에 최적의 탐지 모델을 제시하고자 한다. 2단계 탐지 방법인 Faster R-CNN 모델과 1단계 탐지 방법인 Yolov8 모델을 선택하였다. 각 모델 학습방법은 다음과 같다.
3.1 Faster R-CNN
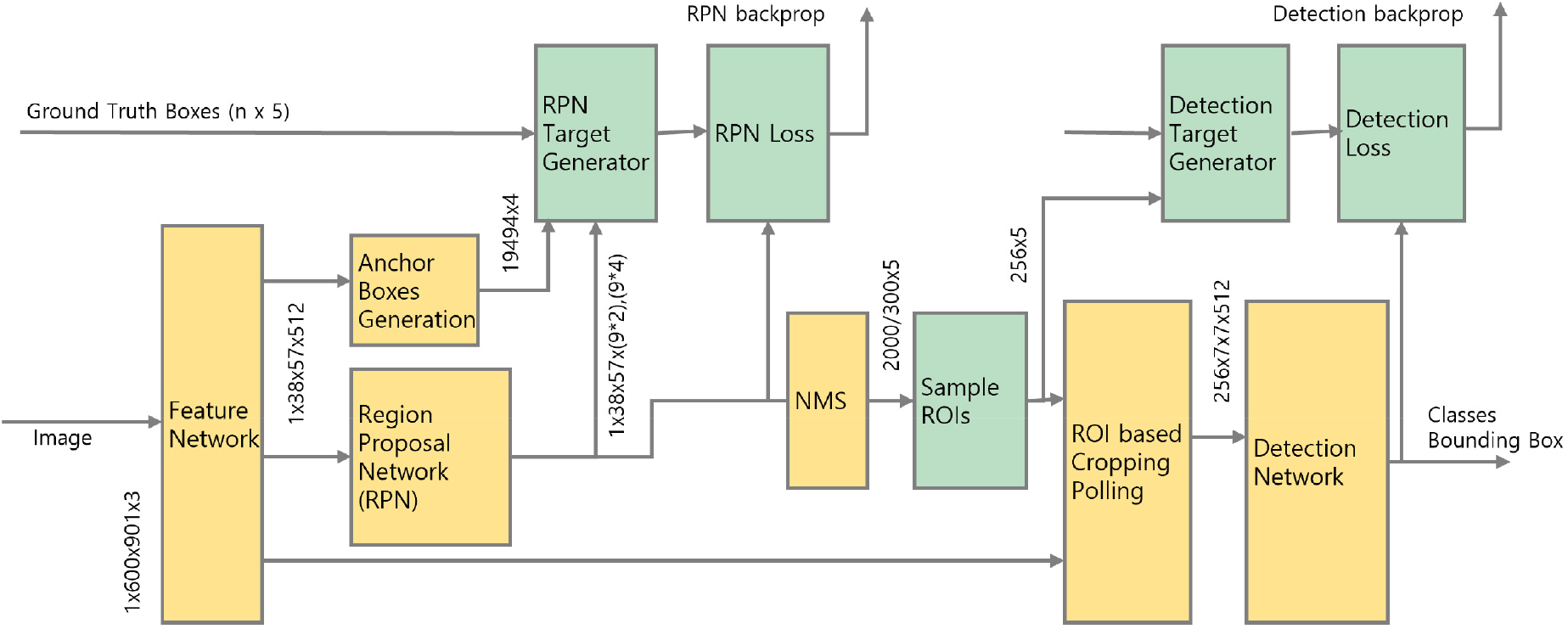
Faster R-CNN은 딥러닝 기반 객체 검출 알고리즘으로, 영역 제안(Region proposal)과 객체 분류를 통합한 두 단계 탐지 방식을 사용하여 높은 정확도와 효율성을 동시에 제공한다. Faster R-CNN은 백본(Backbone) 네트워크를 통해 입력 이미지의 특징 맵을 추출하고, 영역제안 네트워크(Region Proposal Network, RPN)를 사용하여 객체가 존재할 가능성이 높은 영역을 생성한다. 이 방법은 ROI(Region of Interest) Pooling을 통해 제안된 영역을 고정된 크기의 특징 맵으로 변환하고, 최종 분류 및 회귀를 통해 각 영역의 객체 클래스와 경계 상자를 예측한다.
Faster R-CNN은 입력 이미지를 특징 맵으로 변환하기 위해 CNN을 백본 네트워크로 사용한다. ResNet, VGG16, 또는 더 최신의 백본(CSPDarkNet 등)을 사용할 수 있다. 입력 이미지에 대한 다층적 공간적 및 채널적 특징을 포함하는 특징 맵(Feature map)을 생성한다. RPN은 Faster R-CNN의 핵심 구성 요소로, 특징 맵에서 객체가 존재할 가능성이 높은 영역을 효율적으로 탐지한다. 특징 맵의 각 위치에 대해 고정 크기의 앵커 박스(Anchor box)를 생성한다. 각 앵커 박스에 대해 두 가지 예측 수행하는데, 객체성 점수(Objectness score)는 해당 앵커에 객체가 존재할 가능성을 예측하고, 경계 상자 조정(Bounding box regression)은 실제 객체 경계와의 차이를 보정한다. RPN이 생성한 제안 상자는 크기가 서로 다르므로, 이를 고정된 크기의 특징 맵으로 변환해야 한다. 이를 위해 Faster R-CNN은 ROI Pooling을 사용한다. ROI Pooling을 통해 고정된 크기의 특징 맵으로 변환된 제안 상자는 최종적으로 Fully Connected Layer(FC Layer)를 통해 각 제안 상자의 특징을 분석하고, 제안 상자가 어떤 클래스에 속하는지, 제안 상자의 좌표를 실제 객체 경계와 일치하도록 정교하게 보정한다. RPN과 최종 탐지 네트워크를 동시에 학습시키기 위해 다중 작업 손실 함수(Multi-task loss)를 사용한다(Fig. 2).
3.2 YOLO
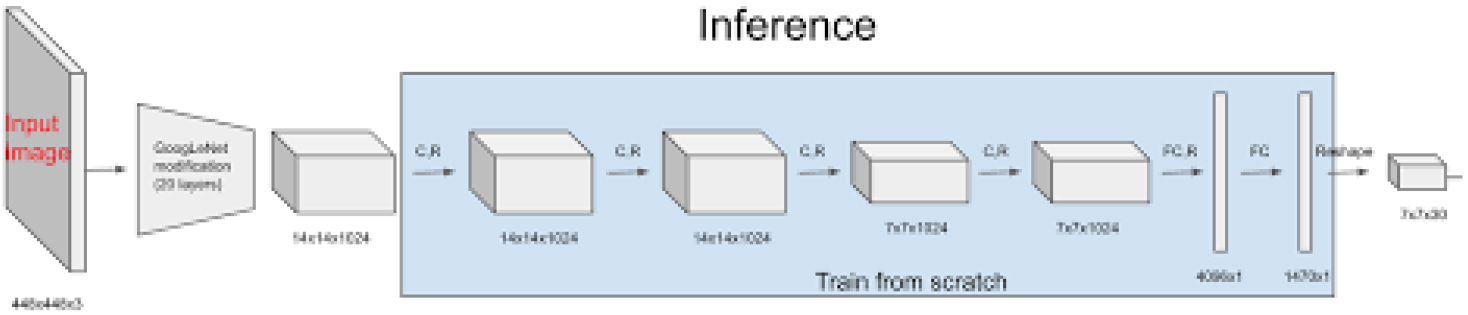
YOLO 모델은 Ultralytics(https://github.com/ultralytics/yolov8)에 의해 오픈소스로 공개되었으며, 각 버전별로 성능 및 속도가 개선되었다. YOLO 알고리즘의 구조는 단일 신경망을 사용하여 객체 검출 문제를 해결하는 방식으로 설계되었다. 모델은 크게 입력 이미지 처리, 특징 추출, 그리고 객체 탐지로 이루어진 세단계로 구성되었다. 이미지 처리는 고정 크기의 이미지를 입력으로 사용하며, 일반적으로 일정한 크기로 리사이즈가 된다. 입력 이미지는 픽셀 값을 [0, 1] 범이로 정규화하여 CNN의 학습과 추론 과정을 최적화 한다. 특징 추출 네트워크 단계에서는 입력 이미지를 특징 맵으로 변환하기 위해 CNN 기반의 Backbone 네트워크를 사용한다. YOLO v5이후 버전은 경량화된 CSP 구조와 Mosaic 데이터 증강, 자동 앵커 박스 설정과 같은 최신 기법을 적용하였다(Fig. 3). 객체 탐지는 입력 이미지의 그리드 셀 단위로 객체를 탐지한다. YOLO 모델은 예측 값과 실제 값 간의 차이를 최소화하는 손실 함수를 통해 이루어진다. 손실함수는 좌표 손실, 객체 존재 손실, 클래스 확률 손실로 구성된다. YOLO는 다중 스케일 탐지를 도입하여 다양한 크기의 객체를 효과적으로 탐지한다. 이는 FPN(Feature Pyramid Network) 또는 PAN(Path Aggregation Network)을 활용하여 고해상도 및 저해상도 특징 맵을 통합함으로써 이루어진다. 작은 객체는 고해상도 특징 맵에서, 큰 객체는 저해상도 특징 맵에서 탐지되며, 이를 통해 탐지 성능이 크게 향상된다.
4. 연구 방법
현재 기존의 임펄스 GPR 장비를 통해 AI 모델 성능은 90%로 보고되고 있지만, NM-GPR 자료에 대한 적용 연구는 미비한 실정이다. NM-GPR 자료 분석과 데이터셋 구축 방법 및 AI 모델 학습 파라미터 설정에 대한 연구가 필요하다. 그래서 본 연구는 서울 지역에서 NM-GPR를 측정한 자료를 분석하고, 공동, 맨홀, 비공동, 배관 데이터로 4개의 클래스로 분류하여 데이터셋을 구축을 하고, 1단계 모델인 YOLO 모델과 2단계 객체탐지 모델인 Faster-RCNN을 적용한 연구를 수행하였다. 이후 각 모델의 성능 평가 후 추가 수집한 시험데이터 셋을 활용하여 탐지 성능을 검증하였다.
4.1 데이터 수집
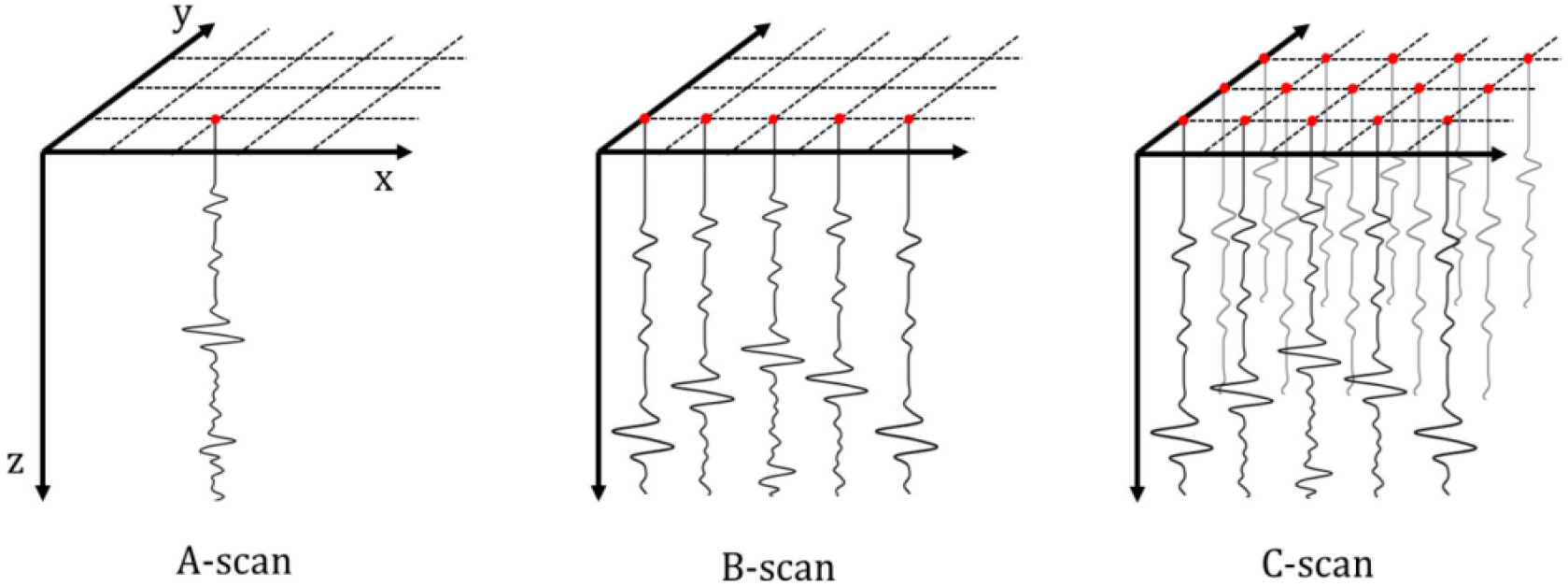
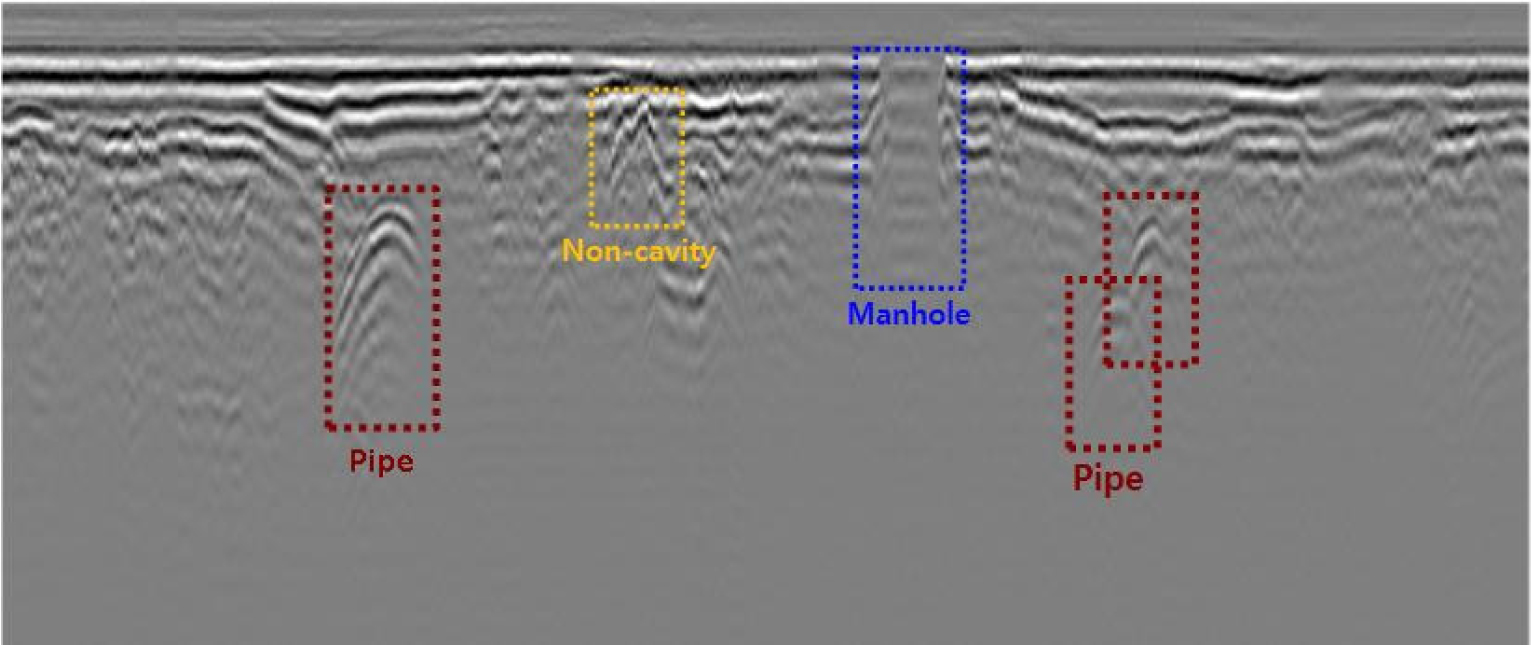
데이터 수집을 위해서 서울시 도로에서 수행한 공동탐사 자료와 GPR 탐사 장비를 활용하여 데이터 수집하였다. 3차원 GPR 장비를 활용하여 각 채널 별로 자료를 획득할 수 있는데, Fig. 4에서 보는 것처럼 하나의 안테나를 활용하던 2차원 GPR을 평행하게 나열하여 일정 범위에 대한 3차원 자료를 획득하는 방법으로 자료를 보는 방향에 따라 A, B, C 단면으로 나눌 수 있다(Choi et al., 2022). 일반적으로 쌍곡선 탐지를 위해서 B-단면을 활용하여 찾고자 하는 객체에 대한 위치정보를 획득할 수 있다. 본 연구에서는 B-단면 자료를 활용하여 인공지능 모델을 평가하였다.
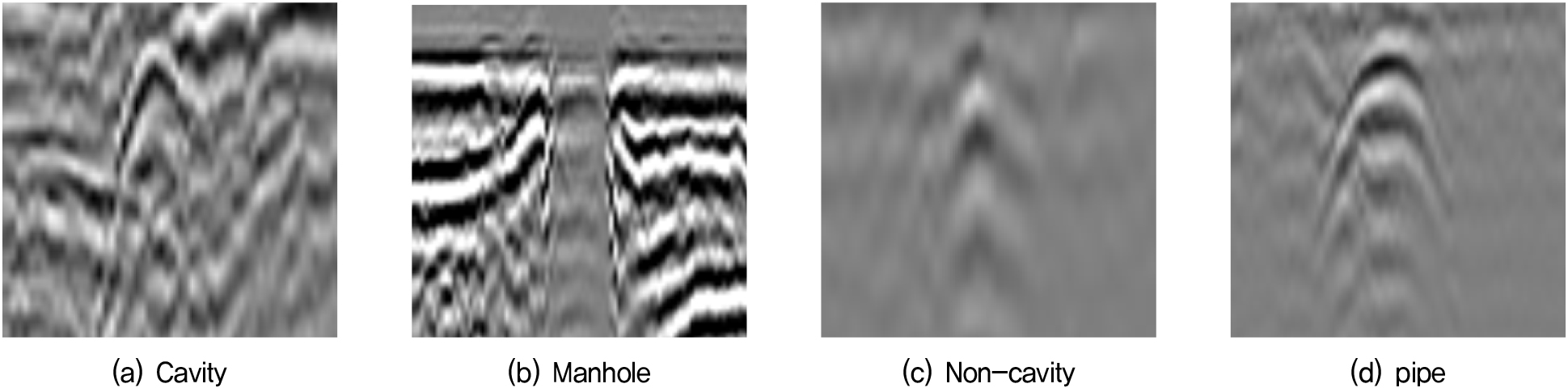
학습데이터의 구축하기 위해서 공동(Cavity), 비공동(Non-cavity), 맨홀(Manhole), 배관(Pipe)으로 분류하였다. 도로 공동 학습데이터(Fig. 5(a))는 전문 분석사가 분석한 결과를 기반하여 현장에서 직접 천공을 통해 확인된 공동조사서를 기준으로 구축하였다. 맨홀 학습데이터(Fig. 5(b))는 GPR과 동시에 측정된 라인스캔 자료에서 맨홀 위치를 찾아 GPR 자료와 비교하여 선별하였다. 이 데이터는 다른 클래스과 달리 쌍곡선 형태가 나타나지 않고, 지반과의 경계가 명확히 나타난다. 비공동 학습데이터(Fig. 5(c))는 다른 클래스인 배관, 공동과 같이 쌍곡선 형태 유사하지만, 실제 공동과 배관이 아닌 모래, 자갈 등에 의해서 발생한 자료이다. 이는 현장의 데이터를 추론시 오탐지에 대한 방지를 위해 클래스를 분류하였다. 배관 학습데이터(Fig. 5(d))는 C-단면(Top-view)을 확인하여 채널별 연속성이 확인되는 쌍곡선에 대해서 라벨링을 수행하였다.
4.2 데이터 구축
NM-GPR 데이터를 활용하여 인공지능 모델 학습을 위해서 2가지 전처리가 필요하다. 첫째로 환경적인 영향과 채널 안테나 성능의 차이로 인해 측정값에 대한 변화가 발생한다. 이를 극복하기 위해서는 환경에 따라 변화하는 신호강도를 변화에 따른 측정치 변화를 주는 이미지 생성 방법과 환경의 변화를 최소화하는 정규화 필터를 활용할 수 있다. 본 연구에서는 다양한 환경의 변화로 인한 측정값 변화를 최소화하기 위해 정규화(Normalization) 필터를 통해 이미지을 동일화 하였다. 이후 각 트레이스(Trace)를 주파수 대역 필터를 통해 노이즈(Noise)를 제거하여 이미지 전처리를 수행하였다.
둘째는 도로에서 획득한 자료는 대용량 데이터로 이미지를 규격화하기 위해서는 객체 위치을 정확하게 파악하고, 최대한 객체의 형태가 끊어지지 않게 해야 한다. 이를 극복하기 위해 다수의 객체가 있는 지점에서 쌍곡선의 형태가 끊어지지 않게 설정하여 이미지를 생성하였다. 학습이미지의 크기는 가로 512pixel, 세로 512pixel로 설정하였다.
학습데이터의 라벨링 형태는 바운딩 박스(Bounding box)을 적용하였다. 각 공동, 맨홀, 비공동, 배관에 대한 클래스 아이디를 0~3의 숫자로 순서대로 지정하였다. 라벨링을 위해 자체 개발한 모듈을 활용하여 총을 수행하였다. Fig. 6과 같이 1개 이미지 내의 객체는 이미지 내에 1~4개로 다양하게 분포하게 하였다. 구축된 데이터의 수는 10,291장을 구축하였다.
학습데이터 셋은 학습용 데이터 80%와 검증용 데이터 20%로 구성하였고, 추가적으로 획득한 400장의 GPR 자료는 공통탐지 정확도를 확인하기 위한 시험 데이터로 활용하였다. 데이터 구성은 Table 2와 같이 구성하였다.
Table 2.
Number of instances per class
| Class | Total | Train (80%) | Validation (20%) |
| Cavity (0) | 6,762 | 5,143 | 1,619 |
| Manhole (1) | 5,389 | 4,069 | 1,320 |
| Non-Cavity (2) | 1,986 | 1,531 | 455 |
| Pipe (3) | 6,066 | 4,602 | 1,464 |
4.3 인공지능 모델 개발
본 연구에서는 YOLOv8과 Faster-RCNN을 활용하여 NM-GPR 탐지 성능을 비교 분석하였다. 현재 국내 GPR 탐지 모델은 YOLO를 많이 활용하여 개발되고 있는 실정인데, YOLO는 이미지 탐지 속도가 빠르고, 지속적으로 버전을 높여가며 탐지 성능도 높아지는 추세이다. Faster-RCNN은 객체탐지를 박스의 영역과 클래스 분류로 나누어 수행하는 2단계 객체탐지 방식으로 정확도가 높을 것으로 예상되지만, 학습 및 추론 속도가 느린것이 단점이다. YOLOv8과 Faster-RCNN 모델 학습을 위해 동일한 epoch 100수의 mAP 변화 그래프 비교 후, 검증데이터를 통해 정확도 및 정밀도(Pricision), 재현율(Recall)를 비교하였다. 본 연구에서 학습에 필요한 구성은 Table 3과 같이 구성하였다.
Table 3.
Server specifications for AI model training
4.4 인공지능 모델 평가 방법
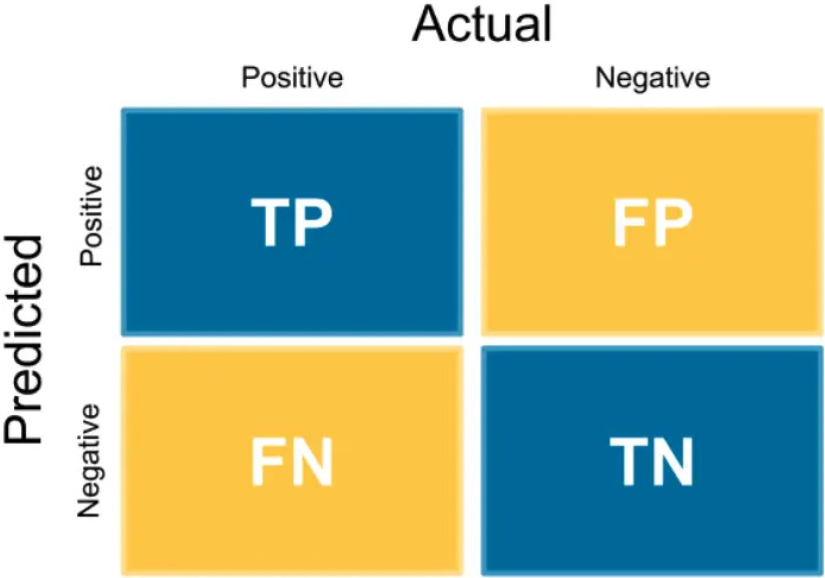
인공지능 모델의 탐지 능력을 검증하기 위해서는 다양한 성능지표를 활용하여 평가할 수 있다. 일반적으로 분류의 성능 평가 지표는 정확도(Accuracy), 정밀도(Precision), 재현율(Recall), F1-스코어가 있다. 4가지 지표를 계산하기 위해서는 혼합행렬(Confusion matrix)을 참고하여 위의 지표를 계산할 수 있다. 혼합행렬은 실제 데이터 라벨과 예측 라벨을 비교하여 표로 나타낸 것이다(Fig. 7).
정확도는 전체 중 모델이 바르게 분류한 비율을 의미하는 것으로 모델 정확성을 평가하는 척도이고(식 (1)), 정밀도는 모델이 참이라고 분류한 것 중 실제 값이 참이 비율(식 (2))을 나타낸다. 재현율는 실제 값이 참인 것 중 모델이 참이라고 분류한 비율로서 정밀도와 비교되는 척도(식 (3))이다.
mAP(mean Average Precision)는 객체 탐지(Object detection) 및 정보 검색 분야에서 모델의 성능을 평가하는 지표로서 여러 클래스에서 평균 정밀도(AP, Average precision)를 계산한 후, 이를 평균으로 계산 값이다. 객체 탐지 모델에 대한 성능 비교에 활용되는데, 높을수록 모델의 정확도가 좋다고 판단할 수 있다. 본 연구에서는 각 모델의 정확도를 mAP를 활용하여 비교·분석 하였다. 객체 탐지에서 예측된 바운딩 박스와 실제 바운딩 박스가 얼마나 겹치는지를 평가하는 IoU(Intersection over Union)가 있다. 이 값은 두바운딩 박스의 겹침 정도를 비율로 나타낸다.
5. 연구 결과
5.1 인공지능 모델 성능평가
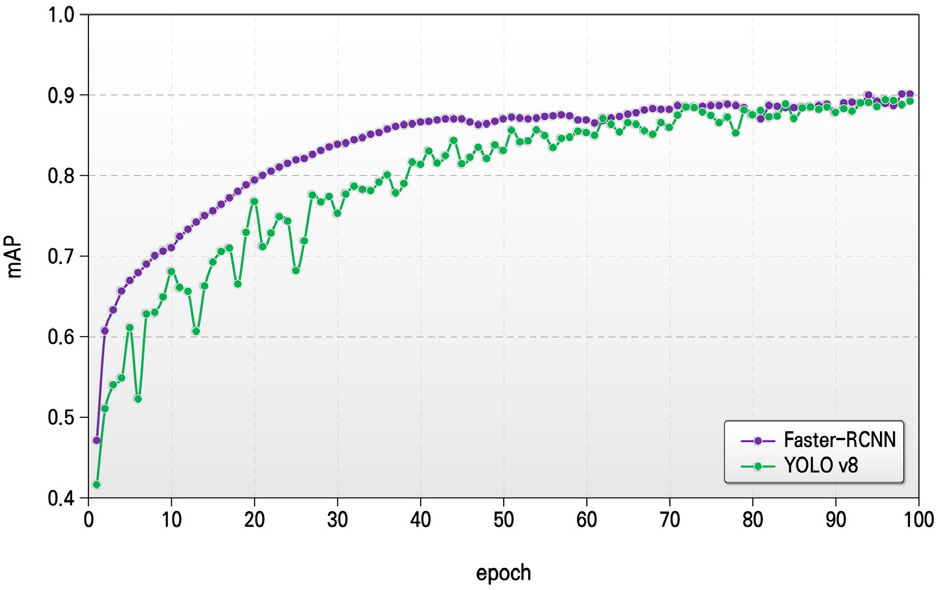
구축된 학습데이터 셋을 통해 적용된 YOLOv8과 Faster-RCNN 모델에 대하여 mAP 성능지표를 이용하여 정확성을 검증하였으며, 객체 탐지의 유사도를 판단할 수 있는 IoU는 0.5 기준으로 하였다. 인공지능 모델의 학습결과는 YOLOv8의 mAP는 0.89 값을 보이고, Faster-RCNN의 mAP는 0.90값을 나타내고 있다(Fig. 8). 두 모델의 mAP 차이는 0.01 값 정도로 근소한 차이를 보이고 있으며 검증 데이터를 통해 정확도, 정밀도 및 재현율을 비교하였다.
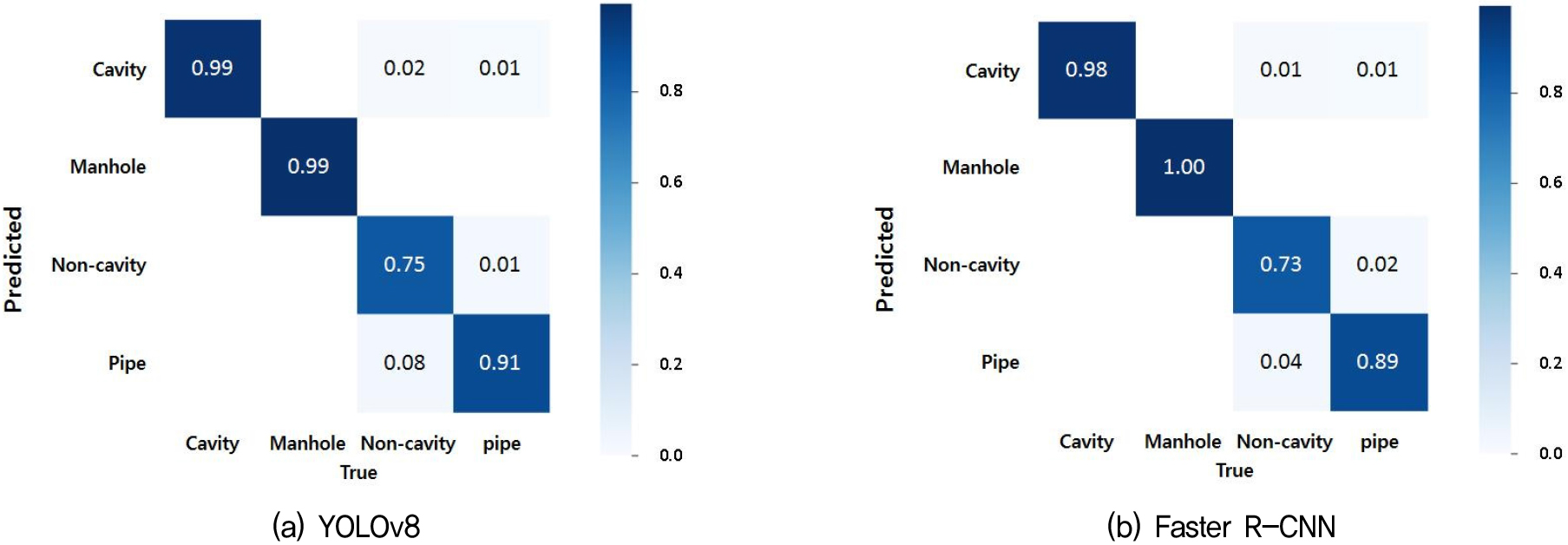
검증데이터를 이용하여 측정된 성능 평가 결과는 Table 4와 같다. 두 모델을 비교한 결과 정밀도, 재현율 및 mAP에 대한 측정값이 유사하게 나오는 것을 확인할 수 있다. 앞서 학습 모델의 mAP의 값과 유사하게 0.01 값의 차이를 보여 두 가지 모델에 대한 성능은 차이가 적은 것으로 판단된다. 검증데이터에 대한 각 클래스의 정확도 비교를 위해 혼합행렬을 비교·분석 하였다. Fig. 9를 살펴보면 맨홀, 공동은 객체 탐지율이 0.98~1.00의 mAP값을 보인다. 그러나 비공동은 0.75와 0.73의 낮은 값을 보이고 있는데, 이는 비공동의 형태의 종류가 많고, 학습데이터 구축시 명확하지 않은 데이터를 선별하는 과정에서 낮아진 것으로 판단된다.
Table 4.
Model performance evaluation results
| Model | YOLOv8 | Faster-RCNN |
| Pricision | 0.88 | 0.88 |
| Recall | 0.89 | 0.90 |
| mAP | 0.91 | 0.90 |
5.2 인공지능 모델 검증 결과
본 연구에서 적용한 YOLOv8과 Faster-RCNN 모델의 검증을 위해 4개의 데이터 셋을 구성하였다. 학습데이터 셋을 제외한 추가 수집 데이터를 활용하였고, 실제 공동을 확인한 데이터만 선별하여 탐지율을 확인하였다. 검증을 위해 구축된 자료는 400장으로 각 데이터 셋에 100장씩 활용하였다. 탐지 결과는 Fig. 10과 같다.
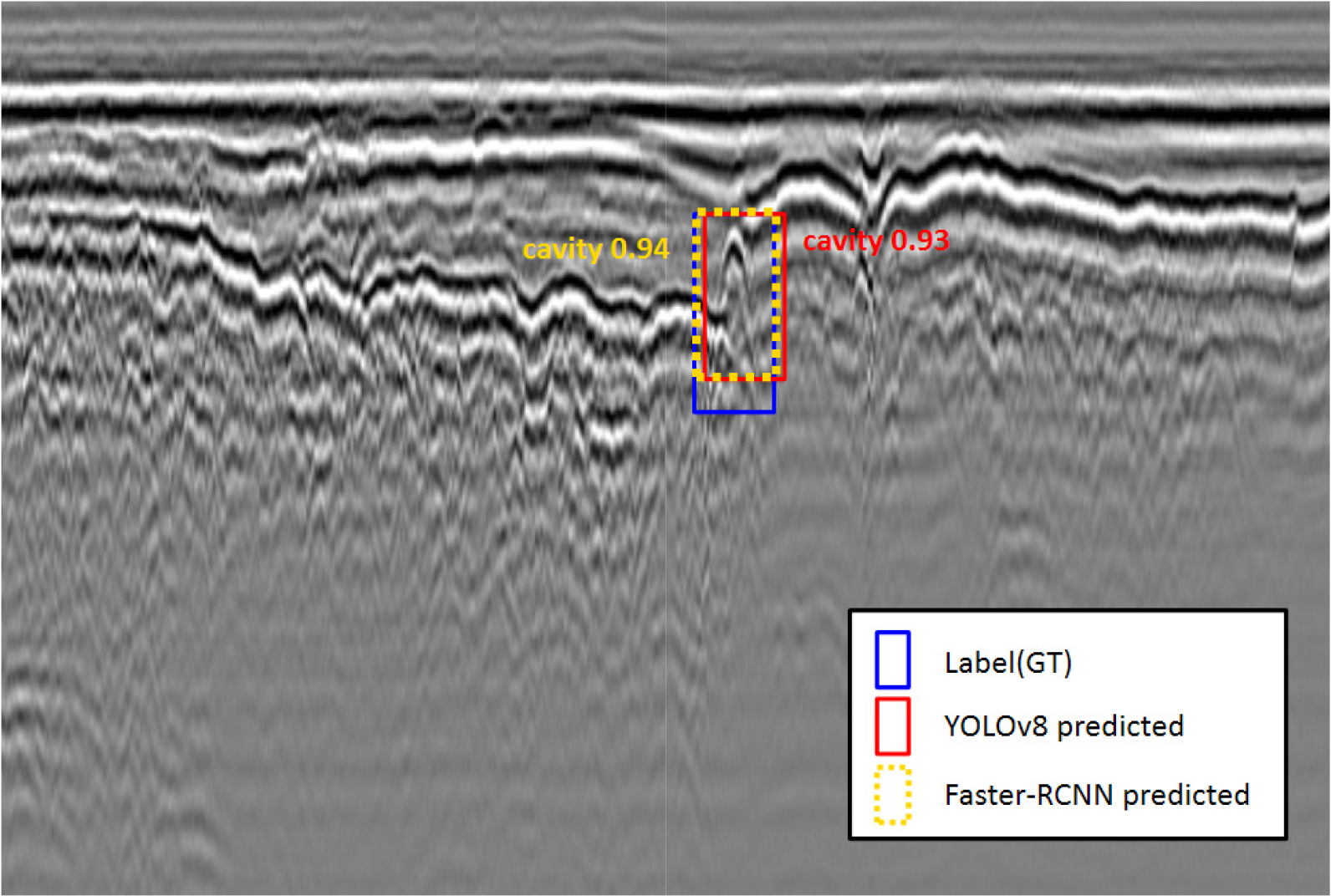
Table 5의 결과를 살펴보면 공동 탐지는 성능 평가와 동일한 값인 0.9 이상의 값을 보이고 있어 현장 적용이 용이할 것으로 예상된다. 그러나 미탐지와 오탐지가 나타나는 것을 볼 수 있는데 오탐지는 10% 가까운 수치를 나타내고 있다. 미탐지는 공동이 있지만, 객체 탐지를 못한 경우이고, 오탐지는 객체를 탐지했지만, 다른 클래스로 인식하는 경우이다. 객체의 미탐지가 적은 이유는 환경적인 요인을 줄이는 전처리로 인해 낮은 수치가 보이는 것으로 예상한다. 그러나 이는 오탐지 데이터의 유사성으로 인해 나타나는 결과로 판단되며, 특히 정확도가 낮은 비공동에 대한 정확한 클래스 분류가 필요할 것으로 판단된다. 공동 데이터 획득은 과정이 복잡하고, 정확한 형태를 규정할 수 없어 이를 극복할 대안이 필요하다.
6. 결 론
(1) 본 연구에서는 NM-GPR 탐사 자료를 활용하여 학습데이터를 구축하고, 이를 이용한 인공지능 모델을 개발하였다. 수집된 데이터의 전처리를 통해 환경변화 및 안테나 간의 영향을 최소화하여 이미지를 정규화하여 학습한 결과 YOLOv8의 mAP는 0.89, Faster-RCNN의 mAP는 0.90의 값을 보였다.
(2) 두 모델의 mAP값을 비교 결과 거의 유사한 값을 보이는 것으로 보아 NM-GPR 자료를 통한 AI 모델 개발이 가능할 것으로 판단되며, 성능평가 결과도 유사한 결과를 보인다. 그러나 추가 수집된 데이터를 통해 검증한 결과 오탐지의 비율이 10% 가까운 수치를 보이는데, 이는 비공동 클래스에 의한 데이터 혼돈으로 판단되므로 추가적인 클래스 분류 및 정밀한 분석이 필요하다.
(3) 본 연구를 통해 기존의 임펄스 신호가 아닌 코드화된 신호를 사용하는 GPR에 대한 인공지능 모델 개발이 가능한 것으로 판단되며, 추가적인 연구를 통해 현장 활용도를 높이는 것이 중요할 것으로 판단된다.
